一种电力设备清洗装置和一种机器人
文献发布时间:2023-06-19 11:27:38
技术领域
本发明涉及电力机车车顶清洁技术领域,尤其涉及一种电力设备清洗装置和一种机器人。
背景技术
电力机车指的是从供电网(接触网)或供电轨中获取电能,再通过电动机驱动车辆行驶的火车。
电力机车车顶设置有绝缘子、避雷器等,目前电力机车车顶的整备清洁工作主要靠人工来完成,对支持绝缘子和避雷器清洗,由于其安装位置高、长期裸露在外、与接触网25KV高压电距离近等特点,构成了其设备安装位置险、作业地表滑、设备表面脏等设备检修客观困难,给检修、保养作业带来巨大的工作量及劳动性危险性。
当然,还有部分采用机器设备对绝缘子、避雷器等进行清洗,现有的这种机器设备包括两条长臂,长臂的一头设置毛刷,通过电机驱动毛刷转动,以绝缘子为例,两条长臂朝向绝缘子移动并位于绝缘子一左一右进行清洗,一般情况下绝缘子位于两条长臂的中心,但是也会发生不在中心的情况,那么离的近的长臂会张开避免与绝缘子碰撞,保证安全,导致清洗不到绝缘子,离的远的接触面积小清洗不干净。
因此,如何提供一种电力设备清洗装置,以提高清洁效果且保证安全,是目前本领域技术人员亟待解决的技术问题。
发明内容
有鉴于此,本发明的目的在于提供一种电力设备清洗装置,以提高清洁效果且保证安全。
为了达到上述目的,本发明提供如下技术方案:
一种电力设备清洗装置,包括连接机构、左支撑臂、右支撑臂、转接块、连接杆、清刷装置和驱动装置,其中,
所述连接机构与所述转接块固定连接,
所述左支撑臂和所述右支撑臂分别布置在所述转接块的两侧,所述左支撑臂朝向所述转接块的一侧与所述转接块铰接,所述右支撑臂朝向所述转接块的一侧与所述转接块铰接,
所述左支撑臂和所述右支撑臂之间设置有所述连接杆且均与所述连接杆铰接,
所述清刷装置为两个且分别转动的设置在所述左支撑臂和所述右支撑臂的端部通过所述驱动装置进行驱动转动。
优选的,上述左支撑臂和所述右支撑臂的端部均设置有用于喷洒清洗液的喷头。
优选的,上左支撑臂和所述右支撑臂之间设置有复位机构,所述复位机构包括左拉杆、右拉杆、左拉伸弹簧和右拉伸弹簧,
所述左支撑臂上设置有左固定板,所述右支撑臂上设置有右固定板,所述连接机构的底部设置有中间固定板,
所述左拉杆的一端与所述中间固定板固定连接,其另一端通过所述左拉伸弹簧与所述左固定板连接,所述右拉杆的一端与所述中间固定板固定连接,其另一端通过所述右拉伸弹簧与所述右固定板连接。
优选的,上述左拉杆和所述右拉杆均与所述中间固定板螺纹连接且设置有调节螺母。
优选的,上述连接机构的底部设置有用于限定所述左支撑臂的旋转角度的左限位块和用于限定所述右支撑臂的旋转角度的右限位块。
优选的,上述驱动装置包括左驱动装置和右驱动装置,所述清刷装置包括左清刷装置和右清刷装置,
所述左驱动装置通过左传动机构驱动所述左清刷装置旋转,所述右驱动装置通过右传动机构驱动所述右清刷装置旋转,所述左传动机构和所述右传动机构的结构相同,
所述左传动机构包括联轴器、前同步带轮、后同步带轮、同步带、张紧轮和转动轴,所述联轴器与所述左驱动装置的输出轴和所述后同步带轮连接,所述同步带套设在所述前同步带轮和所述后同步带轮上,所述张紧轮设置在所述同步带的外侧,所述转动轴固定在所述前同步带轮的轴心孔,所述左清刷装置固定在所述转动轴上。
优选的,上述的电力设备清洗装置还包括检测装置,所述检测装置包括支架、扣合在所述支架上的外壳和内置在所述外壳中且固定在所述支架上的相机、激光传感器、光源和总接头,
所述相机、所述激光传感器、所述光源的线缆均连接至所述总接头,
所述支架与所述连接机构连接。
优选的,上述驱动装置为伺服电机。
优选的,上述清刷装置为毛刷。
本发明还提供一种机器人,包括机器人手臂,还包括如上述任意一项所述的电力设备清洗装置,
所述连接机构与所述机器人手臂连接。
本发明提供的电力设备清洗装置,包括连接机构、左支撑臂、右支撑臂、转接块、连接杆、清刷装置和驱动装置,其中,
所述连接机构与所述转接块固定连接,
所述左支撑臂和所述右支撑臂分别布置在所述转接块的两侧,所述左支撑臂朝向所述转接块的一侧与所述转接块铰接,所述右支撑臂朝向所述转接块的一侧与所述转接块铰接,
所述左支撑臂和所述右支撑臂之间设置有所述连接杆且均与所述连接杆铰接,
所述清刷装置为两个且分别转动的设置在所述左支撑臂和所述右支撑臂的端部通过所述驱动装置进行驱动转动。
本发明提供的电力设备清洗装置,转接块、左支撑臂、右支撑臂和连接杆形成一个平行四边形,通过该平行四边形机构实现左支撑臂上的左清刷装置和右支撑臂上的右清刷装置的同步移动,在支持绝缘子或避雷器定位存在定位偏差的时候,左支撑臂和右支撑臂可以实现自动联动,使支持绝缘子或避雷器一直保持在两个清刷装置的中间位置,从而使支持绝缘子或避雷器清洗的更加全面干净,提高清洁效果且保证安全。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明实施例提供的电力设备清洗装置的结构示意图;
图2为本发明实施例提供的左传动机构的结构示意图;
图3为本发明实施例提供的复位机构的结构示意图;
图4为本发明实施例提供的检测装置的结构示意图;
图5为本发明实施例提供的检测装置的内部结构示意图;
图6为本发明实施例提供的平行四边形机构联动时的结构示意图。
图1-6中:
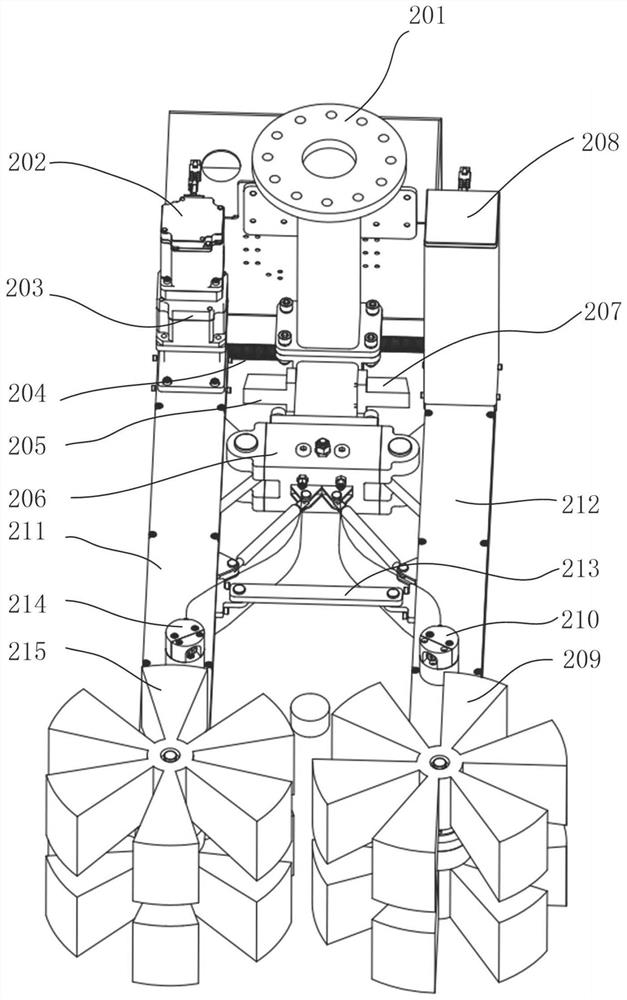
相机101、激光传感器102、光源103、总接头104、外壳105、支架106、连接机构201、左驱动装置202、减速机203、复位机构204、左限位块205、转接块206、右限位块207、右驱动装置208、右清刷装置209、右喷头210、左支撑臂211、右支撑臂212、连接杆213、左喷头214、左清刷装置215、左拉伸弹簧301、左拉杆302、调节螺母303、右固定板304、右拉伸弹簧305、中间固定板306、右拉杆307、左固定板308、联轴器401、前同步带轮402、同步带403、张紧轮404、转动轴405、后同步带轮406。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参考图1至图6,图1为本发明实施例提供的电力设备清洗装置的结构示意图;图2为本发明实施例提供的左传动机构的结构示意图;图3为本发明实施例提供的复位机构的结构示意图;图4为本发明实施例提供的检测装置的结构示意图;图5为本发明实施例提供的检测装置的内部结构示意图;
图6为本发明实施例提供的平行四边形机构联动时的结构示意图。
本发明实施例提供的电力设备清洗装置,包括连接机构201、左支撑臂211、右支撑臂212、转接块206、连接杆213、清刷装置215和驱动装置,其中,
连接机构201与转接块206固定连接,
左支撑臂211和右支撑臂212分别布置在转接块206的两侧,左支撑臂211朝向转接块206的一侧与转接块206铰接,右支撑臂212朝向转接块206的一侧与转接块206铰接,
左支撑臂211和右支撑臂212之间设置有连接杆213且均与连接杆213铰接,
清刷装置为两个且分别转动的设置在左支撑臂211和右支撑臂212的端部通过驱动装置进行驱动转动。
本发明实施例提供的电力设备清洗装置,转接块206、左支撑臂211、右支撑臂212和连接杆213形成一个平行四边形,通过该平行四边形机构实现左支撑臂211上的左清刷装置215和右支撑臂212上的右清刷装置209的同步移动,在支持绝缘子或避雷器定位存在定位偏差的时候,左支撑臂211和右支撑臂212可以实现自动联动,使支持绝缘子或避雷器一直保持在两个清刷装置的中间位置,从而使支持绝缘子或避雷器清洗的更加全面干净,提高清洁效果且保证安全。
为了进一步优化上述方案,左支撑臂211和右支撑臂212的端部均设置有用于喷洒清洗液的喷头,其中,左支撑臂211上设置有左喷头214,右支撑臂212上设置有右喷头210。
为了进一步优化上述方案,左支撑臂211和右支撑臂212之间设置有复位机构204,复位机构204包括左拉杆302、右拉杆307、左拉伸弹簧301和右拉伸弹簧305,
左支撑臂211上设置有左固定板308,右支撑臂212上设置有右固定板304,连接机构201的底部设置有中间固定板306,
左拉杆302的一端与中间固定板306固定连接,其另一端通过左拉伸弹簧301与左固定板308连接,右拉杆307的一端与中间固定板306固定连接,其另一端通过右拉伸弹簧305与右固定板304连接。
为了进一步优化上述方案,左拉杆302和右拉杆307均与中间固定板306螺纹连接且设置有调节螺母303。
为了进一步优化上述方案,连接机构201的底部设置有用于限定左支撑臂211的旋转角度的左限位块205和用于限定右支撑臂212的旋转角度的右限位块207。
为了进一步优化上述方案,驱动装置包括左驱动装置202和右驱动装置208,清刷装置包括左清刷装置215和右清刷装置209,
左驱动装置202通过左传动机构驱动左清刷装置215旋转,右驱动装置208通过右传动机构驱动右清刷装置209旋转,左传动机构和右传动机构的结构相同,
左传动机构包括联轴器401、前同步带轮402、后同步带轮406、同步带(403)、张紧轮(404)和转动轴(405),联轴器401与左驱动装置202的输出轴和后同步带轮406连接,同步带403套设在前同步带轮402和后同步带轮406上,张紧轮404设置在同步带403的外侧,转动轴405固定在前同步带轮402的轴心孔,左清刷装置215固定在转动轴405上。
为了进一步优化上述方案,上述的电力设备清洗装置还包括检测装置,
检测装置包括支架106、扣合在支架106上的外壳105和内置在外壳105中且固定在支架106上的相机101、激光传感器102、光源103和总接头104,
相机101、激光传感器102、光源103的线缆均连接至总接头104,支架106与连接机构201连接。
具体的,驱动装置为伺服电机。清刷装置为毛刷。
本发明还包括一种机器人,包括机器人手臂,还包括如上述任意一项实施例所述的电力设备清洗装置,连接机构201与机器人手臂连接。
目前,在机车整备作业车间,为提高整备作业的自动化程度、作业效率、安全系数以及降低人工的劳动强度等,采用机器人自动化作业已成为必然趋势。但是,目前的整备机器人的末端工具存在一定的缺陷(机器人末端工具指的是连接在机器人手腕的前端具有一定功能的工具),一是不能对车顶紧固件松动进行检测,二是当定位不太准确的时候不能对支持绝缘子和避雷器清扫干净,本发明实施例提供的电力设备清洗装置,是一种安装在整备机器人末端用于对支持绝缘子和避雷器进行清洗,对电力机车受电弓和紧固件进行检测的末端工具装置。
具体的,本发明实施例提供的电力设备清洗装置,该末端工具装置由清洗装置和检测装置组成,清洗装置由伺服电机、减速机203、同步带轮、同步带403、毛刷和连接机构201等组成。检测装置由相机101、光源103、传感器等组合在一起。
当需要清洗支持绝缘子或避雷器的时候,机器人带动末端工具使毛刷到达支持绝缘子或避雷器附近,毛刷开始转动,毛刷一边转动一边往前走,直到能清洗到整个支持绝缘子或避雷器,然后毛刷再反转着退出支持绝缘子或避雷器,整个末端工具装置利用平行四边形机构使支持绝缘子或避雷器一直保持在两个毛刷的中间位置,清洗会更加彻底;当需要检测工作的时候,机器人带动末端工具到达机车受电弓碳滑条上端或侧面或紧固件上方启动相机101进行拍照采集图片信息。
本发明实施例提供的电力设备清洗装置,主要由连接机构201、左驱动装置202、减速机203、复位机构204、左限位块205、转接块206、右限位块207、右驱动装置208、右清刷装置209、右喷头210、左支撑臂211、右支撑臂212、连接杆213、左喷头214、左清刷装置215组成。
连接机构201通过螺栓和转接块206固定在一起,转接块206通过轴分别和左支撑臂211、右支撑臂212铰接在一起,内置滑动轴承可以自由转动,左支撑臂211、右支撑臂212通过轴与连接杆213铰接在一起,内置滑动轴承可以自由转动,因此转接块206、左支撑臂211、右支撑臂212、连接杆213形成一个平行四边形结构,左支撑臂211和右支撑臂212可以同步转动,左限位块205和右限位块207可以把左支撑臂211、右支撑臂212的旋转角度限定在一定范围内,传送机构由联轴器401、前同步带轮402、同步带403、张紧轮404、转动轴405、后同步带轮406组成,毛刷通过键安装在转动轴405上,可以在电机的带动下通过传送机构转动。
其中,复位机构204选用的是两根拉伸弹簧,两个拉杆、四个调节螺母、两个固定板304,左固定板308、右固定板304分别和左支撑臂211、右支撑臂212固定在一起,左拉杆302、右拉杆307与连接机构201上面的中间固定板306开孔连接在一起,选用的拉伸弹簧的长度小于弹簧的安装距,使拉伸弹簧在初始位置保持拉伸状态,调整四个调节螺母303到合适的位置,使左支撑臂211、右支撑臂212保持在和连接机构201垂直的位置,如图1所示,此位置为清洗末端的初始位置。
当需要清洗支持绝缘子或避雷器的时候,机器人带动末端工具使毛刷到达支持绝缘子或避雷器附近,驱动伺服电机启动,和电机轴端连接的传送机构带动毛刷转动,毛刷一边转动一边往前走,直到能清洗到整个支持绝缘子或避雷器,然后毛刷再反转着退出支持绝缘子或避雷器,清洗完成后再进行下一个支持绝缘子或避雷器的清洗。
当支持绝缘子或避雷器的位置定位不准确,也就是不在毛刷中间存在一定量的偏差的时候,离支持绝缘子或避雷器近的一端的毛刷受到阻力就会偏向一边,连接杆213也会带着另一个毛刷一起偏转,从而使支持绝缘子或避雷器始终保持在两个毛刷的中心位置,如图6所示,当毛刷从支持绝缘子或避雷器退出后,左支撑臂211、右支撑臂212会在复位机构204的弹簧拉力的作用下复位到初始位置。
检测装置由相机101、激光传感器102、光源103、总接头104组成,所有原件被封装在外壳105内,实现高度集成,减小了检测模块的体积和重量,四个接头集成在一起形成总接头104便于接线。三个相机101分别实现对受电弓裂纹缺损、受电弓厚度和紧固件松动检测
当需要检测工作的时候,整备机器人带动末端工具以不同的姿态到达相应的检测位置进行定位或拍照。
本发明用平行四边形机构实现两个毛刷的同步的转动,在支持绝缘子或避雷器定位存在定位偏差的时候,可以实现自动联动转动,使持绝缘子或避雷器一直保持在两个毛刷的中间位置,从而使支持绝缘子或避雷器清洗的更加全面干净、清洗完成退出后毛刷可以自动复位,保证了下一个清洗元件进入位置的准确性。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 一种电力设备清洗装置和一种机器人
- 一种电力设备的清洗机器人