相机模块主动对准方法
文献发布时间:2023-06-19 11:27:38
技术领域
本发明涉及一种相机模块主动对准方法,更为详细地,涉及一种能够提高相机模块组装质量的相机模块主动对准方法。
背景技术
最近的数码相机随着高像素化和小型化,映像的画质成为相机性能的主要变数。特别是,随着移动通信终端设备中也配备高像素图像传感器,并具备变焦功能及自动调焦功能,对镜头模块的需求呈现出逐渐增加的趋势。
镜头及相机的性能根据如何精巧地制作镜头模块而具有很多差异。镜头设计固然是一个重要因素,但是将设计的镜头组装成多符合设计值也会作为一个重要的变数发挥作用。
由于以往的相机模块使用低像素、单焦点镜头,因此仅依存于器械的设计值,并根据器械的间距进行组装,而利用这种方式组装也能够维持某种程度的性能。但是,如果是高像素图像传感器,在组装过程中若不检验图像传感器的组装状态,则会发生映像扭曲或焦点对不准的问题。
因此,如果是安装高像素图像传感器的镜头模块,要经过直接观察映像确认组装状态的过程来组装镜头模块。即,在以往的镜头模块组装中,使用了组装者在看板的画面的同时,一一通过人工操作确定图像传感器位置的方法。
图1是表示用于确定图像传感器位置的六个轴的图。
参照图1说明六个轴如下。
首先,X轴和Y轴方向的移动执行调节图像传感器10的中心能够来到镜头20的光轴的功能,Z轴方向的移动执行调节图像传感器10的成像面能够位于镜头20的焦点位置的功能。而且,X轴旋转(Tilt X,TX)和Y轴旋转(Tilt Y,TY)执行使图像传感器10的成像面能够维持平面的功能,Z轴旋转(Roll,R)执行防止发生映像倾斜的功能。
根据以往技术,组装者在改变各个所述轴方向位置及旋转斜率的过程中,若图像传感器位于通过相机装置的映像判断为最佳的位置,则在该位置组装镜头模块和图像传感器。
但是,根据上述的以往技术的相机镜头模块的组装方法存在如下问题。
首先,要根据组装者的判断来寻找图像传感器的位置,因此根据组装者个人的主观判断,产品的特性可能各不相同,并且有可能发生失误。
其次,在需要微调的相机镜头模块的组装过程中,依赖于人的视觉和知觉来寻找图像传感器的位置,因此存在所需时间较长的问题。
专利文献1:韩国公开专利公报第10-2007-0055037号
发明内容
本发明是鉴于上述问题而提出的,其目的在于提供一种相机模块主动对准方法,该方法利用检测用图表的图表图像,对准镜头的中心轴和图像传感器的中心轴,并提取多个配设在检测用图表上的各个图案的SFR峰值之后,利用其优化镜头与图像传感器的相对位置及相对斜率,从而能够提高相机模块的组装质量。
而且,其目的在于提供一种相机模块主动对准方法,该方法不仅能够将用于调整镜头与图像传感器的相对位置以便进行聚焦的移动方向限制在一个方向,还能将移动距离最小化,从而能够提高每小时的生产量。
而且,其目的在于提供一种相机模块主动对准方法,该方法在调整镜头斜率的过程中,能够防止镜头与图像传感器的碰撞。
所述目的可通过本发明的相机模块主动对准方法来实现。本发明的相机模块主动对准方法的特征在于,包括:准备步骤,用于上下配设镜头和图像传感器;第一对准步骤,通过所述图像传感器,从配设在镜头前方的检测用图表获得图表图像,并利用图表图像调整所述镜头与图像传感器的X轴和Y轴方向的相对位置及Z轴旋转的相对斜率;聚焦步骤,用于在调整所述镜头与图像传感器的Z轴方向相对位置的同时,寻找配设在检测用图表上的多个图案的各个最佳聚焦位置;第二对准步骤,用于分析位于所述检测用图表的各个边角上的边角图案的最佳聚焦位置,以调整所述镜头与图像传感器的X轴旋转及Y轴旋转的相对斜率;及第三对准步骤,以位于所述检测用图表的中央的中央图案的最佳聚焦位置为基准,调整所述镜头与图像传感器的Z轴方向相对位置。
在此,在所述第一对准步骤中,为了使所述图表图像的中心点和在所述图表图像上显示的检测用图表的中心点对齐,优选调整所述镜头与图像传感器的X轴和Y轴方向的相对位置及Z轴旋转的相对斜率。
而且,在所述聚焦步骤之前,优选执行将所述镜头移动到预先设定的聚焦开始位置的预移动步骤。
而且,所述第二对准步骤在调整所述镜头与图像传感器的X轴旋转及Y轴旋转的相对倾斜之前,为了避免所述镜头与图像传感器彼此碰撞,优选执行向隔离方向移动所述镜头与图像传感器中的至少一个的步骤。
而且,在所述第二对准步骤中,优选判断在所述聚焦步骤中提取的边角图案的最佳聚焦偏差是否属于预先设定的基准范围内,若属于基准范围内,则移至第三对准步骤,若不属于基准范围内,则执行调整所述镜头与图像传感器的X轴旋转及Y轴旋转的相对斜率的步骤。
而且,所述第二对准步骤优选在调整所述镜头与图像传感器的X轴旋转及Y轴旋转的相对斜率之后,将所述镜头与图像传感器的Z轴方向相对位置还原到执行所述聚焦步骤之前的状态,然后移到聚焦步骤。
而且,在所述第三对准步骤之后,优选执行用于固定所述镜头与图像传感器的相对位置的固定步骤。
而且,所述固定步骤优选包括:在所述准备步骤中将图像传感器移动到镜头下部之前,在所述图像传感器的与所述镜头的结合部位涂布光固化树脂的步骤;和在所述镜头位置确定步骤之后固化光固化树脂的步骤。
根据本发明提供一种相机模块主动对准方法,该方法利用检测用图表的图表图像,对准镜头的中心轴与图像传感器的中心轴,并提取多个配设在检测用图表上的各个图案的SFR峰值之后,利用其优化镜头与图像传感器的相对斜率及相对位置,从而能够提高相机模块的组装质量。
而且,本发明提供一种相机模块主动对准方法,该方法不仅能够将用于调整镜头与图像传感器的相对位置以便进行聚焦的移动方向限制在一个方向,还能够将移动距离最小化,因此能够提高每小时的生产量。
而且,本发明提供一种相机模块主动对准方法,该方法在调整镜头斜率的过程中,能够防止镜头与图像传感器的碰撞。
附图说明
图1是表示用于确定图像传感器位置的六个轴的图。
图2及图3是本发明的相机模块主动对准方法的顺序图。
图4是表示镜头与图像传感器及检测用图表的配设关系的图。
图5是表示根据本发明相机模块主动对准方法的中心轴对准步骤的作用的图。
图6是表示根据镜头对准状态的SFR的图表。
图7是表示根据本发明相机模块主动对准方法的斜率对准步骤的作用的图。
具体实施方式
在进行说明之前需要明确的是,在多个实施例中,对于具有相同结构的结构要素使用相同的附图标记在第一实施例中进行代表性的说明,在其他实施例中只说明不同于第一实施例的结构。
下面,参照附图详细说明根据本发明的第一实施例的相机模块主动对准方法。
附图中,图2及图3是本明的相机模块主动对准方法的顺序图,图4是表示镜头与图像传感器及检测用图表的配设关系的图,图5是表示根据本发明相机模块主动对准方法的中心轴对准步骤的作用的图,图6是表示根据镜头对准状态的SFR的图表,图7是表示根据本发明相机模块主动对准方法的斜率对准步骤的作用的图。
如上述图中所示,本发明的相机模块主动对准方法包活准备步骤S10、第一对准步骤S20、预移动步骤S30、聚焦步骤S40、第二对准步骤S50、第三对准步骤S60及固定步骤S70。
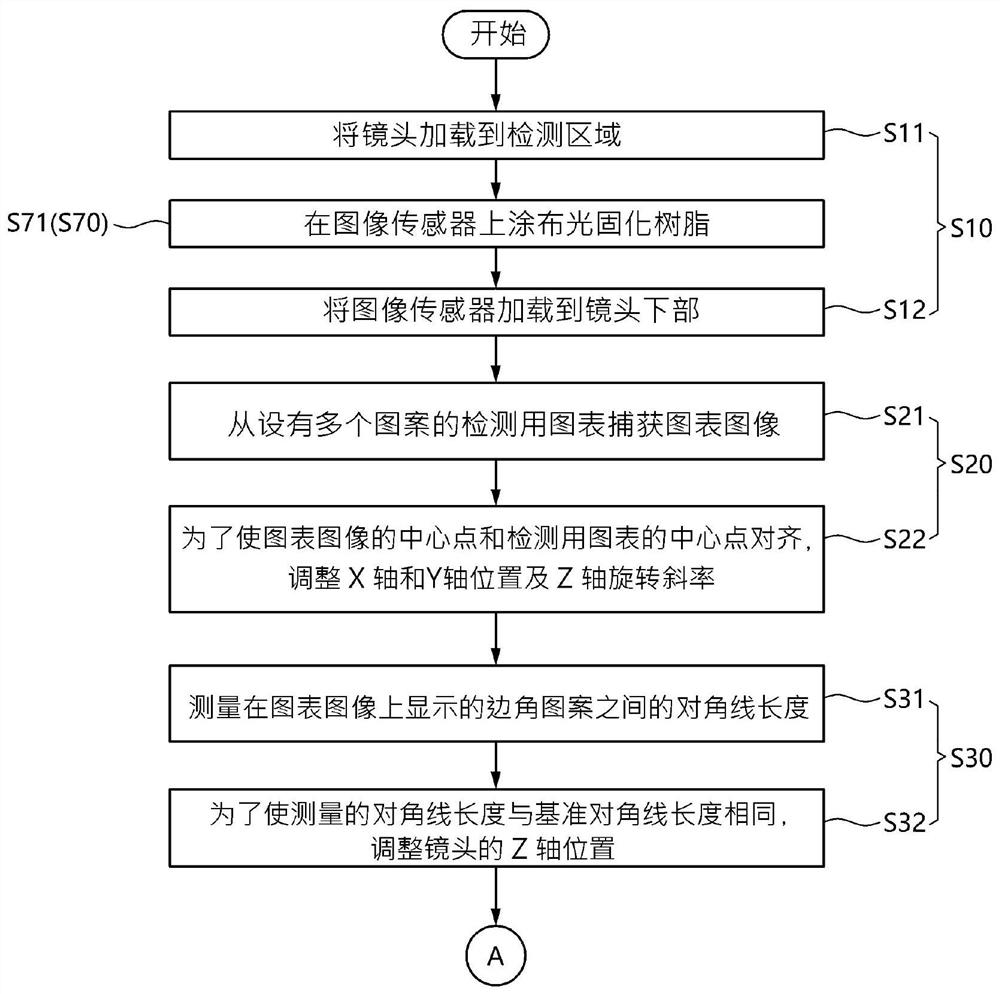
所述准备步骤S10用于上下配设构成相机模块的镜头20和图像传感器10(参见图4),包括:通过拾取器(未图示)拾起通过另外的供应托盘所供应的镜头20并向检测区域加载的步骤S11;及向位于检测区域下部的插口平台(未图示)加载通过另外的供应托盘所供应的图像传感器10并配设在镜头20的下部的步骤S12。
在此,所述插口平台优选形成为可向所述图像传感器10施加电源或者能够输入/输出信号的形态。
另外,在本实施例中以下述情况为例进行了说明,但并不限定于此:即,为了调整所述镜头20与图像传感器10的相对位置,所述拾取器构成为可带动镜头20进行Z轴方向的移位、X轴旋转(TX)及Y轴旋转(TY),所述插口平台构成为可带动图像传感器10进行X轴方向移位、Y轴方向移位及Z轴旋转(R)。在此,所述X轴及Y轴是指在水平面上相互正交的两个水平轴,所述Z轴是指与所述X轴及Y轴以垂直方向正交的竖直轴。而且,所述X轴旋转(TX)是指以X轴为中心进行的旋转,所述Y轴旋转(TY)是指以Y轴为中心进行的旋转,所述Z轴旋转(R)是指以Z轴为中心进行的旋转(参见图1)。
将所述图像传感器10向镜头20的下部加载之前,在所述图像传感器10的与所述镜头20的结合部位可涂布光固化树脂。在本实施例中,以在所述图像传感器10上涂布光固化树脂为例进行了说明,但是也可在所述镜头20的与所述图像传感器10的结合部位涂布光固化树脂。
而且,在所述检测区域的上部区域设有检测用图表30,并且在所述检测用图表30的中央和各个边角分别设有用于进行空间频率响应(Spatial Frequency Response,以下称为“SRF”)检测的图案31(参照图4)。在此,所述SFR检测是通过分析图案31的边缘部分的频率成分,用高频率成分值的大小来判断分辨率,所述频率成分的分析可通过另外配设的控制部来执行。这种SFR检测是为了检测相机模块分辨率而通常广为采用的方法,故省略对SFR检测方法的具体说明。
所述第一对准步骤S20用于调整所述镜头20与图像传感器10的X轴和Y轴方向的相对位置及Z轴旋转的相对斜率,包括步骤S21和步骤S22,在所述步骤21中拍摄设有多个图案31的检测用图表30以获得图表图像30',在所述步骤S22中,如图5的(a)所示,分别提取图表图像30'的中心点a1和在图表图像30'上显示的检测用图表30的中心点a2,并且如图5的(b)及图5的(c)所示,为了使所述图像传感器30’的中心点a1与检测用图表30的中心点a2相对齐,调整所述图像传感器10的X轴和Y轴方向的相对位置及Z轴旋转(R)的相对斜率。在此,用于提取所述中心点的计算可在控制部进行,所述控制部可具备用于储存数据的存储器和用于处理数据的处理器等。
所述预移动步骤S30用于将所述镜头20移动到预先设定的聚焦开始位置,包括:用于测量在所述图表图像30'上显示的检测用图表30的边角图案31之间的对角线长度的步骤S31;及为了使预先存储的基准对角线长度和拍摄的图表图像30'上的边角图案31之间的对角线长度相同,调整所述镜头20的Z轴方向相对位置的步骤S32。
具体地,在控制部中,检测用图表30的中央图案31为最佳焦点的状态下的边角图案31之间的对角线长度作为基准对角线长度可预先储存,并且可预先储存有在所述镜头20与图像传感器10在Z轴方向的不同的相对位置调整距离下的对角线长度的变化率。因此,控制部在测量所述图表图像30'上边角图案31之间的对角线长度之后,可基于所述变化率来计算使所述测量的对角线长度与基准对角线长度相同的镜头20在Z轴方向的移动距离。例如,若基准对角线长度为20mm,所述镜头20在Z轴方向上移动+0.1mm时测量的对角线长度增加+0.2mm,此时如果测量的对角线长度为16mm,则可以使所述镜头20在Z轴方向上移位+2mm,使得测量的对角线长度成为20mm。
通常,只根据在加载镜头20的初始位置获得的图表图像30'的SFR,不能设定用于寻找最佳焦点的镜头20的Z轴移动方向的基准。因此,以往根据镜头20的初始位置向一方向移动的过程中测量SFR,并且移动一定距离之后仍未发现最佳聚焦位置时,则需要向反方向再次移动的过程中寻找最佳聚焦位置,因此存在Z轴方向移动距离增加,随之每小时生产量(UPH;Unit Per Hour)降低的问题。
但是,若通过如上所述的预移动步骤S30将镜头20移动到预先设定的位置,总是在规定的高度,即在规定的焦点位置能够开始用于进行聚焦的操作,因此不仅可以将镜头20的Z轴移动方向限制在一个方向,还能将镜头20在Z轴上的移动距离最小化,从而能够提高产品的每小时生产量。
在所述聚焦步骤S40中,可以使所述镜头20在Z轴方向移动以使其接近图像传感器10的同时,分步调整镜头20相对于图像传感器10的Z轴方向的相对位置,在此过程中,可检测出对于设在检测用图表30上的多个图案31的各个最佳聚焦位置。
具体地,控制部可对通过分步调整所述镜头20在Z轴上的位置的过程中测量的各个图案31的SFR进行曲线拟合而提取提取SFR图表,并通过SFR图表的峰值(以下称为“SFR峰值”)位置寻找相应图案31的最佳聚焦位置(参见图6)。即,所述SFR峰值意味着相应图案31的最佳聚焦位置。
在所述聚焦步骤S40中,对拍摄的图表图像30'上的中央图案31和各个边角图案31测量SFR。
此时,由于在所述镜头20和图像传感器10的组装过程中发生的各种因素,镜头20的光轴相对于图像传感器10的成像面有可能不是垂直地配设,而是倾斜任意角度,这种情况下,图表图像30'的中央图案31的SFR峰值和边角图案31的SFR峰值出现在不同的位置,因此,图表图像30'的中央图案31的SFR峰值与边角图案31的SFR峰值的水平方向间隔会与镜头20的倾斜角度成比例地增加(参见图6的(a))。
这可以判断为以中央图案31为基准恰当聚焦的的镜头20的位置与以边角图案31为基准恰当聚焦的镜头20的位置互不相同。
这种情况下,会导致拍摄到的图表图像30'的外围部画质降低等对分辨率带来不良影响,因此为了在拍摄到的图表图像30’的所用区域中均能表现相似的SFR峰值,需要调整镜头20的位置。
另一方面,在镜头20的光轴相对于图像传感器10的成像面垂直配设的理想情况下,拍摄到的图表图像30'的中央图案31的SFR峰值和边角图案31的SFR峰值会发生在临近的位置上(参见图6的(b))。
这是以拍摄到的图表图像30’的中央图案31为基准恰当聚焦的镜头20的位置与以边角图案31为基准恰当聚焦的镜头20的位置相同的情况,可以判断为所述镜头20的光轴垂直地配设在图像传感器10的成像面上的理想的情况。
所述第二对准步骤S50包括:判断步骤S51,用于判断在所述聚焦步骤中提取的边角图案31的最佳聚焦的偏差(deviation)是否属于预先设定的基准范围内;及调整步骤S52,用于分析对于位于检测用图表30的各个边角上的图案31的最佳聚焦位置,并且在此基础上,以X轴及Y轴为中心旋转所述镜头20和图像传感器10中至少一个,以调整镜头20与图像传感器10的X轴旋转及Y轴旋转的相对斜率。
另外,若边角图案31的最佳聚焦偏差属于基准范围内,则判断为镜头20的光轴与图像传感器10的光轴实质上对齐,移到第三对准步骤S60。
在此,位于所述各个边角上的图案31的最佳聚焦偏差可通过在聚焦步骤S40中提取的图表(参见图6)确认。若镜头20的对准状态优良,则如图6的(b)所示,随着各个图案31的SFR峰值(最佳焦点)在相互对齐或者邻近的位置上在横轴方向上排列,偏差L2较小;若镜头20的对准状态不良,则如图6的(a)所示,随着各个图案31的SFR峰值在横轴方向上隔开,偏差L1较大。因此,在控制部中,当各个图案31的最佳聚焦偏差属于预先设定的基准范围内时,可判断为镜头20的对准状态优良,当不属于基准范围内时,可判断为镜头20的对准状态不良。
因此,在所述判断步骤S51中,若在聚焦步骤S40中提取的图表(参见图6)中的边角图案31的最佳聚焦偏差L2属于预先设定的基准范围内(参见图6b),则判断为镜头20的光轴与图像传感器10的光轴实质上对齐,并向第三对准步骤S60移动,若边角图案31的最佳聚焦偏差L1不属于预先设定的基准范围内(参见图6的(a)),则判断为镜头20倾斜,并向调整步骤S52移动。
另外,如图7的(a)所示,控制部可通过分析在所述聚焦步骤S40中测量的各个图案31的SFR峰值位置,获知镜头20相对于图像传感器10的斜率值,并在所述调整步骤S52中,可根据所述斜率值调整镜头20的斜率。
例如,横向斜率可通过比较位于一侧横边上的边角图案31的最低SFR峰值位置和最高SFR峰值位置而计算的高度差和位于所述一侧横边上的边角图案31的最低SFR峰值位置和最高SFR峰值位置的横边长度来测量,由此如图7的(b)所示可调整镜头20相对于图像传感器10的Y轴旋转(TY)的相对斜率。
而且,纵向斜率可通过比较位于一侧纵边上的边角图案31的最低SFR峰值位置和最高SFR峰值位置而计算的高度差和位于所述一侧纵边上的边角图案31的最低SFR峰值位置和最高SFR峰值位置的纵边长度来测量,由此如图7的(c)所示可调整镜头20相对于图像传感器10的X轴旋转(TX)的相对斜率。
因此,可通过根据如上所述测量的横向与纵向斜率角度固定镜头20的拾取器,将镜头20的位置以X轴及Y轴为中心分别进行旋转,从而能够调整镜头20相对于图像传感器10的X轴旋转(TX)及Y轴旋转(TY)的相对斜率。
另外,在所述第二对准步骤S50中,在执行所述调整步骤S52之前,为了避免所述镜头20和图像传感器10彼此碰撞,可向隔离方向移动所述镜头20和图像传感器10中的至少一个,而且在执行所述调整步骤S52之后,为了能够顺利执行聚焦步骤S40,优选将所述镜头20与图像传感器10的Z轴方向相对位置还原至执行所述聚焦步骤S40之前的状态。
在所述第三对准步骤S60中,以所述检测用图表30的中央图案31的最佳聚焦位置为基准校正所述镜头20的Z轴方向位置。
另外,在本实施例中,以将中央图案31的最佳聚焦位置设定成相对于Z轴校正的基准值为例进行了说明,但是也可将中央图案31的SFR峰值和边角图案31的SFR峰值调整为规定的百分比,从而确定镜头20的Z轴方向位置。
与此同时,在第三对准步骤S60之后,优选通过图像传感器10对检测用图表30执行分辨率检测,以进一步验证镜头20与图像传感器10的对准状态。
在所述固定步骤S70中固定所述镜头20和图像传感器10。
此时,作为用于固定所述镜头20和图像传感器10的方法,可使用光固化树脂,可通过向所述准备步骤S10中涂布于图像传感器10的光固化树脂照射紫外线来固化光固化树脂,由此固定所述镜头20和图像传感器10以完成组装。
另外,在所述固定步骤S70之后,可执行将完成组装的相机模块卸载到另外的运出用托盘的工序。
本发明的保护范围并不限于上述实施例,而是在所附的权利要求书的范围内可以实现为多种形式的实施例。因此在不脱离权利要求书所要求保护的本发明精神的范围内,本领域技术人员所能进行的各种变形范围均属于本发明的权利要求书中记载的范围内。
附图标记说明
10:图像传感器 20:镜头 30:检测用图表
31:图案 30’:图表图像
- 相机模块初步主动对准装置和方法及相机模块组装方法
- 相机模块主动对准方法