一种水下机器人用防振紧固螺栓的紧固方法
文献发布时间:2023-06-19 11:29:13
技术领域
本发明属于构件紧固领域,具体涉及一种水下机器人用防振紧固螺栓的紧固方法。
背景技术
水下机器人是集机械、电子、控制、传感、人工智能等多学科先进技术于一体的水下自动化装备。水下机器人在海洋资源勘探、海洋钻井平台维护、海洋牧场监测及水下作战方面有着重要的应用。由于水下环境复杂,存在着如洋流、波浪等环境低频振动以及机器人本体如推进器、液压阀、电机等部件的高频振动,长期使用下容易造成结构不稳定,而水下机器人存在着不易维护检修,造价高昂,发生事故难以回收的问题,因此提高水下机器人的作业稳定性、降低其事故率的水下机器人防震禁锢螺栓具有极高的应用价值。
发明人检索到以下相关文献:CN 108061091A公开了—种螺栓防松锁紧方法及永不松动螺栓,以上技术提出了双螺母反扣的锁紧方法,但其螺杆设计时由于杆径突变致使应力集中,从而降低螺杆强度。另一方面,设计的螺母接触面可相对转动,双螺母无法完全锁死,从而致使螺栓的紧固性能降低。
发明内容
针对上述技术问题,本发明旨在提供一种水下机器人用防振紧固螺栓的紧固方法。
本发明采用的技术方案是:
一种水下机器人用防振紧固螺栓的紧固方法,所述防振紧固螺栓包括变径螺杆,所述变径螺杆包括螺纹方向相反的第一螺纹段和第二螺纹段,所述第一螺纹段和第二螺纹段之间设有变径过渡段;第一螺纹段配合有第一螺母(第一螺母与第一螺纹段的螺纹相吻合),第二螺纹段配合有第二螺母(第二螺母与第二螺纹段的螺纹相吻合),第一螺母和第二螺母之间连接有双螺母连接器,所述双螺母连接器两端分别设有环状楔形体,其两端环状楔形体分别与第一螺母后端的环状楔形体和第二螺母前端的环状楔形体啮合,将第一螺母和第二螺母连接为整体;
所述防振紧固螺栓的紧固方法包括如下步骤:
第一步:变径螺杆穿过物体预留孔洞并紧固第一螺母;
第二步:安装双螺母连接器,双螺母连接器前端的环状楔形体与第一螺母后端的环状楔形体相啮合;
第三步:最大限度紧固第二螺母并使双螺母连接器后端的环状楔形体与第二螺母前端的环状楔形体相啮合。
所述第一螺纹段的直径大于第二螺纹段的直径,且第一螺母自由穿过第二螺纹段。
所述变径过渡段长度为第二螺纹段直径的1-3倍,变径过渡段长度过短容易出现应力集中,变径过渡段长度过长容易造成材料浪费。更进一步地,变径过渡段长度为第二螺纹段直径的1倍。
所述双螺母连接器长度大于或等于变径过渡段长度,当双螺母连接器长度大于变径过渡段长度时,双螺母连接器与第一螺纹段、第二螺纹段和螺杆变径过渡段嵌套连接;当双螺母连接器长度等于变径过渡段长度时,双螺母连接器与变径过渡段嵌套连接。
所述双螺母连接器的弹性模量小于第一螺母和第二螺母,进一步地,双螺母连接器采用软钢材料。
优选所述变径螺杆的两端都设有螺纹方向相反的第一螺纹段和第二螺纹段。
本发明的有益效果:
(1)提高螺栓抗振能力。反纹双扣锁死系统可有效防止螺栓在高频振动荷载作用下发生松弛、失效,极大提升了螺栓的抗振性能,实现振动荷载作用下,螺栓永不松动。
(2)减少螺杆的强度损失。螺杆变径过渡段的设计充分考虑了应力传递规律,规避了结构形状突变造成的应力集中从而降低螺杆强度,实现了螺杆变径过程中最小限度降低螺杆强度。
(3)增强螺栓耐久性能。因为双螺母连接器的弹性模量小于第一螺母、第二螺母,所以高频振动下,双螺母挤压双螺母连接器,产生阻尼效应,双螺母连接器通过变形耗散能量,减少第一螺母、第二螺母的动力损伤,增强螺栓的耐久性能。
(4)通过设置双螺母连接器两端的环状楔形体、第一螺母后端的环状楔形体、第二螺母后端的环状楔形体、实现第一螺母与第二螺母的有效接触,第二螺母紧固后,挤压双螺母连接器,从而对第一螺母产生挤压作用,有效防止第一螺母松动;并实现第一螺母与第二螺母在双螺母连接器的传动状态下同步转动。
(5)解决水下机器人用螺栓受到水下长期存在环境造成的低频振动与本体部件造成的高频振动影响下产生松弛、导致结构不稳定的问题,提高水下机器人长时间工作的结构稳定,降低其维护成本和事故率,有广泛的应用前景和显著的经济、社会效益。
附图说明
图1为本发明实施例1的示意图;
图2为本发明实施例1的分解图;
图3为本发明实施例1的剖视图;
图4为本发明实施例2的示意图;
图5为本发明实施例2的分解图;
图6为双螺母连接器;
图7为图6的左视图;
图8为图6的右视图。
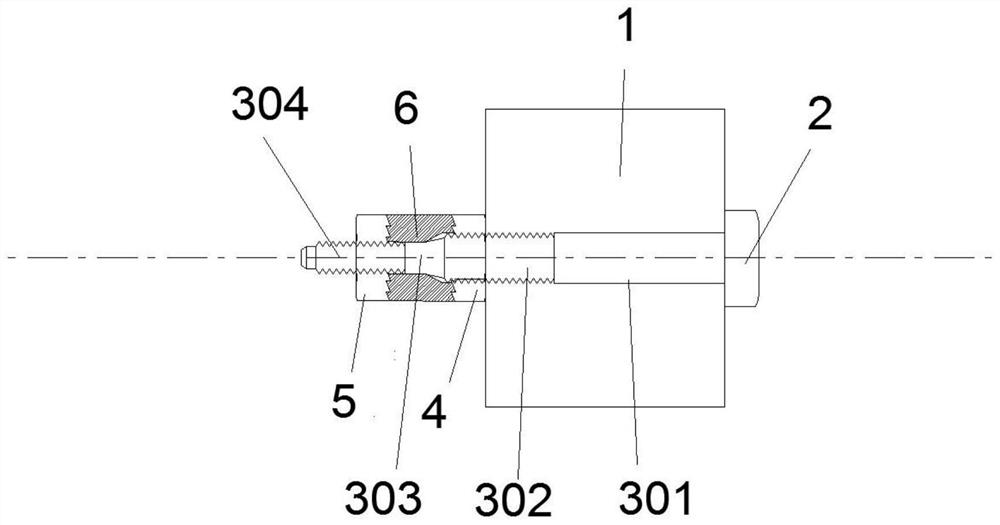
其中,1、物体;2、螺栓头部;3、变径螺杆;301、光滑螺杆段;302、第一螺纹段;303、变径过渡段;302、第二螺纹段;4、第一螺母;5、第二螺母;6、双螺母连接器
具体实施方式
需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖向”、“纵向”、“横向”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
实施例1
如图1-3、图6-8所示,一种水下机器人用防振紧固螺栓的紧固方法,所述防振紧固螺栓包括螺栓头部2和变径螺杆3,所述变径螺杆3包括螺纹方向相反的第一螺纹段302和第二螺纹段304,所述第一螺纹段302和第二螺纹段304之间设有变径过渡段303;第一螺纹段302配合有第一螺母4,第二螺纹段304配合有第二螺母5,第一螺母4和第二螺母5之间连接有双螺母连接器6,所述双螺母连接器6两端分别设有环状楔形体,其两端环状楔形体分别与第一螺母4后端的环状楔形体和第二螺母5前端的环状楔形体啮合,将第一螺母4和第二螺母5连接为整体;所述第一螺纹段302的直径大于第二螺纹段304的直径,且第一螺母4可自由穿过第二螺纹段304,所述变径过渡段303长度为第二螺纹段304直径的1倍,所述双螺母连接器6长度大于螺杆变径过渡段303长度,双螺母连接器6与第一螺纹段302、第二螺纹段304和变径过渡段303嵌套连接。所述双螺母连接器6的强度与第一螺母4、第二螺母5强度相当,但双螺母连接器6采用软钢材料;
所述防振紧固螺栓的紧固方法包括如下步骤:
第一步:变径螺杆3穿过物体1预留孔洞并紧固第一螺母4;
第二步:安装双螺母连接器6,双螺母连接器6前端的环状楔形体与第一螺母4后端的环状楔形体相啮合;
第三步:最大限度紧固第二螺5母并使双螺母连接器6后端的环状楔形体与第二螺母5前端的环状楔形体相啮合。
其原理是第一螺纹段302与第二螺纹段304的螺纹方向相反,当第一螺母4与第二螺母5同一方向旋转时,第一螺母4向外旋转出现松动趋势时,第二螺母5向外旋转出现紧固趋势,实现双螺母反扣锁定。
实施例2
实施例2为实施例1中根据工程需要转化的一种水下机器人用双向防振紧固螺栓的紧固方法,如图4-8所示,所述防振紧固螺栓包括变径螺杆3,所述变径螺杆3的两端都设有螺纹方向相反的第一螺纹段302和第二螺纹段304,所述第一螺纹段302和第二螺纹段304之间设有变径过渡段303;第一螺纹段302配合有第一螺母4,第二螺纹段304配合有第二螺母5,第一螺母4和第二螺母5之间连接有双螺母连接器6,所述双螺母连接器6两端分别设有环状楔形体,其两端环状楔形体分别与第一螺母4后端的环状楔形体和第二螺母5前端的环状楔形体啮合,将第一螺母4和第二螺母5连接为整体;所述第一螺纹段302的直径大于第二螺纹段304的直径,且第一螺母4可自由穿过第二螺纹段304。所述变径过渡段303长度为第二螺纹段304直径的1倍。所述双螺母连接器6长度大于变径过渡段303长度,双螺母连接器6与第一螺纹段302、第二螺纹段304和变径过渡段303嵌套连接。所述双螺母连接器6的强度与第一螺母4、第二螺母5强度相当,但双螺母连接器6采用软钢材料;
双向防振紧固螺栓的紧固方法包括如下步骤:
第一步:变径螺杆3穿过物体1预留孔洞并从变径螺杆3两端分别紧固第一螺母4;
第二步:变径螺杆3两端分别安装合适规格的双螺母连接器6,双螺母连接器6前端的环状楔形体与第一螺母302后端的环状楔形体相啮合;
第三步:变径螺杆3两端最大限度紧固第二螺母5并使双螺母连接器6后端的环状楔形体与第二螺母304前端的环状楔形体相啮合。
本发明解决了螺栓在高频振动环境下的可靠性能并不稳定,极易发生松弛、失效的问题,适用于轨道交通、土木工程、机械制造等多个领域,可有效提高螺栓抗振能力,减少螺杆的强度损失,增强螺栓耐久性能,具有广泛的应用前景和显著的经济、社会效益。
- 一种水下机器人用防振紧固螺栓的紧固方法
- 一种输电线路带电紧固螺栓机器人