一种具有快速合闸功能的断路器触头机构
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及断路器领域,尤其涉及一种具有快速合闸功能的断路器触头机构。
背景技术
众所周知,小型断路器在带载合闸或分闸时,触头间会产生电弧,这电弧会烧蚀断路器的动静触点,因此触头间电弧的大小和转移熄灭时间对小型断路器的电气寿命影响极为明显。相较分闸,小型断路器的合闸时触头间的电弧抑制更为重要,因为断路器的触头分闸速度由机构弹簧驱动,速度一般比较快且稳定,而断路器的合闸速度则受人力或操作电机影响,一般速度较慢,电弧烧灼时间长,对触头的损伤大,特别是对于大额定电流的小型断路器,影响尤为明显。
近几年发展起来的电能表外置断路器或其他通过远程控制有电机驱动合闸的智能化断路器,其断路器的合闸由控制模块的电机驱动,其合闸一般需要2秒左右,合闸速度比一般人力合闸速度更慢,而电能表外置断路器的额定电流通常比较大,一般都是63A以上,合分闸时触头间会产生明显电弧,因此市面上现有的电能表外置断路器产品,其电气寿命难以满足要求。
综上,开发一款具有高合闸速度、实用、可靠和结构简单的断路器触头机构将对延长小型断路器的使用寿命及整个断路器行业的发展都具有积极的影响。
现有专利提供的一种瞬时闭合结构及开关装置(201720492534.X)及一种小型断路器快合闸结构(201620120982.X),它们的快投机构特别是快投储能结构(储能弹簧)设在手柄处的快投机构,其快速合闸驱动力时由手柄处的储能弹簧提供,快速合闸时需要克服整个触头机构的旋转阻力或者是机构部件的滑动摩擦阻力,快速合闸阻力大,同时整个触头机构的质量大,惯性也大,快速合闸的加速度小,因此其快速合闸的速度无法和本方案相比,另外现有方案在快速合闸时对触头机构的U型连杆、机构支架等零部件冲击较大,容易使这些零部件变形从而使断路器性能飘移。
智能化断路器典型结构是在断路器的一侧设置智能控制模块,智能控制模块的电机齿轮系统通过贯穿断路器各极手柄旋转轴心的截面形状为矩形或其他非圆形的传动轴驱动各极断路器手柄进行合闸动作,因此这种智能化断路器的手柄轴心均设置有一个矩形或其他非圆形通孔以容纳传动轴,现有把储能结构设置在手柄上的快投机构,其储能机构占用了大部分的手柄空间使得手柄零件强度大幅减弱,容易变形或断裂,同时手柄内的传动孔变小,减弱了内轴传动的稳定性和传动效率,容易导致内轴孔开裂,变形,传动比不稳定从而影响智能化断路器的动作性能。
现有把储能结构(储能弹簧)设置在手柄处的快投机构以及其他现有的快投机构是把快投功能件与断路器触头机构功能件相结合,一旦快投机构失效,影响断路器的基本保护功能。
发明内容
本发明提供了一种具有快速合闸功能的断路器触头机构,其克服了背景技术中所述的现有技术的不足。
本发明解决其技术问题所采用的技术方案是:
一种具有快速合闸功能的断路器触头机构,它包括:
动触头、机构支架、机构主轴、枢轴及触头弹簧;机构主轴固定在断路器壳体上,机构支架的一端与机构主轴转动连接,动触头的中部与机构主轴抵靠接触,动触头的一端和机构支架的自由端通过枢轴铰接,手柄与机构支架联动,触头弹簧连接在机构支架与动触头之间;及
快投锁扣件及快投跳扣件,快投锁扣件与机构主轴转动连接,具有止挡臂、第一锁扣臂,快投跳扣件转动连接在断路器壳体上,具有第二锁扣臂、脱扣臂、连接臂及弹性件,弹性件连接在连接臂与断路器壳体之间;
手柄带动机构支架及动触头从分闸位置合闸到停滞位置时,动触头受到快投锁扣件的止挡臂的阻挡且第一锁扣臂与第二锁扣臂扣合以阻止快投锁扣件绕机构主轴旋转,使动触头停止合闸;
手柄继续往合闸方向动作,手柄的旋转带动机构支架继续合闸,且触头弹簧开始储能;直至与手柄同步动作的部件与快投跳扣件的脱扣臂顶抵使第二锁扣臂与第一锁扣臂脱扣,此时快投锁扣件被释放,动触头在触头弹簧的作用下迅速合闸。
一实施例之中:该快投锁扣件还具有复位挡臂,断路器触头机构分闸时,该复位挡臂能在动触头分闸时,和与动触头分闸同步动作的部件顶抵并在动触头的驱动下将快投锁扣件复位,复位后的第一锁扣臂和第二锁扣臂重新扣合。
一实施例之中:该与手柄同步动作的部件包括机构支架或手柄本身。
一实施例之中:该与动触头分闸同步动作的部件包括机构支架或动触头本身。
一实施例之中:还包括跳扣件和锁扣件,跳扣件连接在枢轴和手柄之间,跳扣件与枢轴枢转连接,手柄与跳扣件连接并通过跳扣件实现与机构支架的联动,锁扣件与机构主轴枢转连接且与跳扣件能实现合闸扣合与过载分闸脱扣。
一实施例之中:该抵靠接触的形式是机构主轴与动触头上开设的孔的间隙接触。
一实施例之中:该抵靠接触的形式是机构主轴与动触头侧面的接触。
本技术方案与背景技术相比,它具有如下优点:
1、动触头合闸主要分为三个阶段:手柄带动合闸阶段、停滞储能阶段及弹簧驱动合闸阶段,在弹簧驱动合闸阶段动触头快速闭合阻力小,速度快,动触头快速闭合时直接受触头弹簧的驱动,只要克服动触头本身的阻力即可,驱动力直接,阻力小,使得触头整体合闸速度更快,也就解决了背景技术所述的合闸速度慢引起电弧灼烧时间太长的问题。
2、本案所述的触头机构根据设计需要能使动触头停滞期间动触点与静触点的间距保持在较大的距离且一致性好,确保了动触头在停滞期间动触点与静触点之间不会被击穿产生电弧。
3、本案所述的触头机构其快投功能的实现比传统的触头机构只增加了快投跳扣件和快投锁扣件两个零件,结构简单,零件数少,可靠性高,占用空间小,不影响断路器原来结构件的运作,这点对于大额定电流的断路器尤为重要,因为在限定的空间内,大额定电流主回路导电件粗大,占用了很大的空间,留给触头机构功能件以及快投机构的空间很小,这使得现有的快投机构方案难以实现,较小的占用空间能够给主回路导体腾出更大的空间。
4、本案所述的动触头机构其快投功能零部件未占用手柄所在的空间,未减弱手柄零部件的强度,不会对采用手柄内轴驱动的智能化断路器的传动结构产生不良影响。
5、本案方案的快投机构远离触头的接触发热部位,其快投零部件不管是用金属还是用塑胶件制作,都具有比较好的高温适应性,特别适用于大额定电流断路器使用。
6、本案的触头机构增加快投跳扣及快投锁扣件,结合触头弹簧实现快速合闸,该设计构思巧妙,实现从无到有的创造设计,创造性高。
7、本方案的快投机构(快投跳扣件、快投锁扣件)与断路器各功能部件相互独立,本快投机构即使失效也不会影响断路器的其他正常功能。
附图说明
下面结合附图和实施例对本发明作进一步说明。
图1为触头机构处于分闸状态的简图。
图1(a)为快投锁扣件的简图。
图1(b)为快投跳扣件的简图。
图1(c)为动触头的简图。
图1(d)为机构支架的简图。
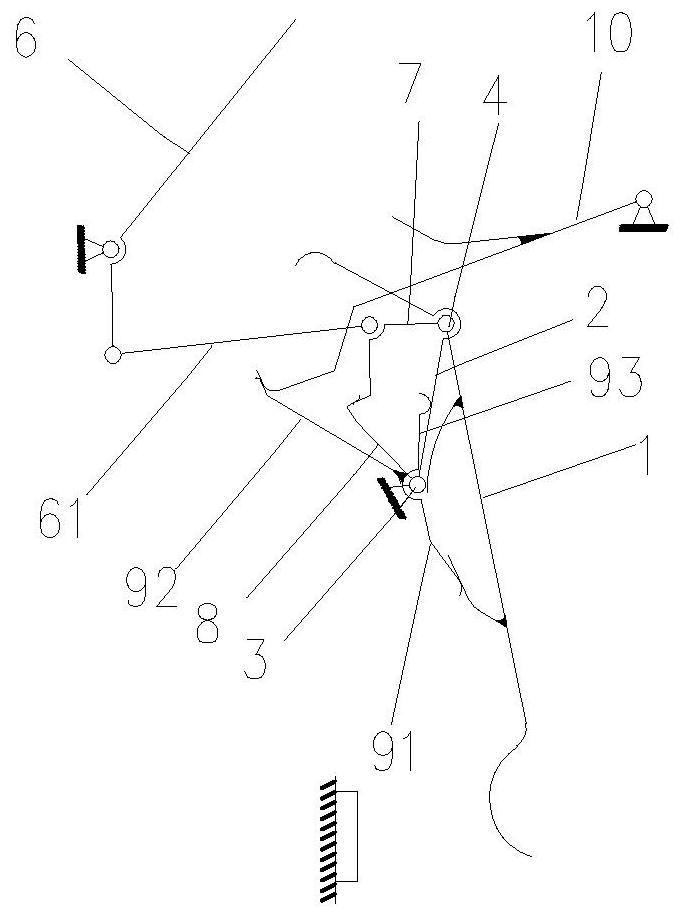
图2为快投跳扣件与快投锁扣件开始解扣状态的触头机构简图。
图3为快投跳扣件与快投锁扣件脱扣瞬间的触头机构简图。
图4为动触头快速闭合瞬间的触头机构简图。
图5为合闸状态的触头机构简图。
图6为触头机构处于分闸状态的结构图。
图7为快投跳扣件与快投锁扣件开始解扣状态的触头机构图。
图8为快投跳扣件与快投锁扣件脱扣瞬间的触头机构图。
图9为动触头快速闭合瞬间的触头机构图。
图10为合闸状态的触头机构图。
图11为触头机构的部分结构图。
图12为快投跳扣件的结构图。
图13为快投锁扣件的结构图。
图14为触头机构结构示意图之一。
图15为触头机构的结构示意图之二。
具体实施方式
请查阅图1至图15,一种具有快速合闸功能的断路器触头机构,它包括动触头1、机构支架2、机构主轴3、枢轴4及触头弹簧5;机构主轴3固定在断路器壳体100上,机构支架2与机构主轴3转动连接,动触头1的中部与机构主轴3抵靠接触(该抵靠接触的形式可以是机构主轴3与动触头1上开设的孔的间隙接触,也可以是机构主轴3与动触头1侧面的接触),动触头1的一端和机构支架2的自由端通过枢轴4铰接,动触头1的另一端设动触点,手柄6与机构支架2联动,触头弹簧5连接在机构支架2与动触头1之间,该触头弹簧5可以是拉簧、扭簧等等,本实施例中,该触头弹簧5为拉簧,其一端固定在机构支架2上,另一端固定在动触头1上,蓄能后的触头弹簧5能够带动动触头1绕着机构主轴3转动并合闸。
该触头机构还包括跳扣件7和锁扣件8,跳扣件7连接在枢轴4和手柄6之间,跳扣件7与枢轴4枢转连接,手柄6与跳扣件7连接(通过拉杆61连接)并通过跳扣件7实现与机构支架2的联动,锁扣件8与机构主轴3枢转连接且与跳扣件7能实现合闸扣合与过载分闸脱扣。
该触头机构还包括快投锁扣件9及快投跳扣件10,快投锁扣件9与机构主轴3转动连接,具有止挡臂91、第一锁扣臂92、复位挡臂93,快投跳扣件10转动连接在断路器壳体100上,具有第二锁扣臂101、脱扣臂102、连接臂103及弹性件(图中未示出),弹性件连接在连接臂103与断路器壳体100之间,用以给快投跳扣件10提供弹性势能使第一锁扣臂92和第二锁扣臂101保持在扣合状态。
该触头机构还包括机构弹簧11及锁扣弹簧12,机构弹簧11用于给触头机构提供分闸动力,锁扣弹簧12用以给锁扣件提供复位力。
本实施例所述的触头机构的合闸过程如下,具体分为三个合闸阶段:
手柄带动合闸阶段:在人力或其他操作外力的作用下,手柄6带动机构支架2及动触头1从分闸位置合闸到停滞位置,在停滞位置,动触头1触碰到快投锁扣件9的止挡臂91,且由于第一锁扣臂92与第二锁扣臂101在快投跳扣件10的弹性件的作用下扣合,快投锁扣件9无法绕机构主轴3旋转,使动触头1无法继续转动合闸,即在停滞位置停止合闸;
停滞储能阶段:动触头1停滞合闸后,在人力或其他外力作用下,手柄6继续往合闸方向动作,手柄6的旋转带动机构支架2绕着机构主轴3继续转动合闸(机构支架2与动触头1在枢轴4上能相对转动),随着机构支架2的继续转动,触头弹簧5的形变逐渐变大,触头弹簧5储能;
弹簧驱动合闸阶段:手柄6继续动作直至与手柄6同步动作的部件(包括机构支架2或手柄6本身或其他部件)与快投跳扣件10的脱扣臂102触碰并顶推第二锁扣臂101使第二锁扣臂101与第一锁扣臂92脱扣,此时快投锁扣件9可绕着机构主轴3转动,止挡臂91对动触头1的阻挡作用消失,快投锁扣件被释放,动触头1可在触头弹簧5的作用下迅速合闸。
该断路器触头机构分闸时,该快投锁扣件9的复位挡臂93能在动触头1分闸时,和与动触头1分闸同步动作的部件(包括机构支架2或动触头1本身或其他部件)顶抵并在动触头1的驱动下将快投锁扣件9复位,复位后的第一锁扣臂92和第二锁扣臂101重新扣合。
本案所述的触头机构设计巧妙,独具创造性,能够有效、可靠地实现断路器的分合闸,同时还能延长断路器触头的使用寿命,推动断路器行业的创新与发展。
以上所述,仅为本发明较佳实施例而已,故不能依此限定本发明实施的范围,即依本发明专利范围及说明书内容所作的等效变化与修饰,皆应仍属本发明涵盖的范围内。
- 一种具有快速合闸功能的断路器触头机构
- 具有自由脱扣功能的手动快速合闸断路器机构