一种用于二氧化碳监测的巡检机器人及其工作方法
文献发布时间:2023-06-19 11:32:36
技术领域
本发明属于二氧化碳传感检测及安防技术领域,具体涉及一种用于二氧化碳监测的巡检机器人及其工作方法。
背景技术
随着社会的快速发展,生产、产生二氧化碳或以二氧化碳作为介质或中间产品的应用领域越来越广泛,当CO
二氧化碳的密度高于空气,在生产、产生二氧化碳或以二氧化碳作为介质或中间产品的空间,二氧化碳的泄漏,会带来一定的安全隐患。如果在环境内布设二氧化碳检测装置,由于生产区域内往往结构复杂,二氧化碳检测装置布置密度过大,则成本过高,二氧化碳检测装置布置密度过小,则又不能达到理想的效果。如果采用人工巡检,不仅效率低下,而且提高了人力成本。
发明内容
为了解决上述问题,本发明的目的在于提供一种用于二氧化碳监测的巡检机器人及其工作方法,效率高,节约了人力物力,提高了生产环境的安全性和可靠性。
本发明是通过以下技术方案来实现:
本发明公开了一种用于二氧化碳监测的巡检机器人,包括外壳和载具,外壳与载具连接,外壳内设有二氧化碳传感器模块、数据处理模块、控制模块、无线通讯模块、报警模块和定位模块;二氧化碳传感器模块与数据处理模块连接,控制模块分别与数据处理模块、无线通讯模块、报警模块、定位模块和载具连接;无线通讯模块与控制终端连接。
优选地,二氧化碳传感器模块为霍尼韦尔CRIR二氧化碳传感器;控制模块为C8051FF09单片机。
优选地,数据处理模块包括信号放大模块、零点校正模块、线性化处理模块、补偿电路模块、误差修正模块、滤波模块和A/D模块;信号放大模块的一端与二氧化碳传感器模块连接,另一端与零点校正模块连接,零点校正模块与线性化处理模块连接,线性化处理模块与补偿电路模块连接,补偿电路模块与误差修正模块连接,误差修正模块与滤波模块连接,滤波模块与A/D模块连接,A/D模块与控制模块连接。
优选地,载具包括动力系统和电源模块。
进一步优选地,电源模块为可充电锂电池。
进一步优选地,动力系统为履带式。
优选地,控制终端为手机、PDA、平板电脑或笔记本电脑。
优选地,控制模块连接有数据存储模块。
优选地,无线通讯模块为WIFI通讯模块或Zigbee通讯模块。
本发明公开的上述用于二氧化碳监测的巡检机器人的工作方法,包括:
巡检机器人按照控制模块内设置的日常巡检路线,通过载具在目标检测区域内进行自动巡检,或由控制终端控制进行巡检;二氧化碳传感器模块实时监测区域内的二氧化碳浓度并将数据发送至数据处理模块,数据经数据处理模块处理后发送至控制模块,控制模块通过无线通讯模块将数据和定位模块产生的位置信息发送至控制终端,同时,控制模块预设有报警阈值,当二氧化碳浓度数值超过报警阈值时,报警模块报警。
与现有技术相比,本发明具有以下有益的技术效果:
本发明公开的一种用于二氧化碳监测的巡检机器人,能够通过载具在目标检测区域内进行巡检,在不易布设固定二氧化碳检测装置的环境中能够发挥优势,免去了二氧化碳检测装置布设的成本。不受限于环境,能够随着生产区域、工艺流程和生产设备的健康状况,随时调整布置、布局;当目标检测区域内的环境、设备等变化时,只需调整巡检路线即可,能够满足二氧化碳监控的需要,有利于尽早、快速发现二氧化碳泄漏,保护人员的生命健康,维护正常的生产和生活秩序。
进一步地,数据处理模块除常规的信号放大模块、滤波模块和A/D模块以外,还包括零点校正模块、线性化处理模块、补偿电路模块和误差修正模块,能够保证数据信号传输的可靠稳定,避免造成漏报误报。
更进一步地,载具的动力系统采用履带式,能够适应各种地面情况。
进一步地,控制模块连接有数据存储模块,能够对数据进行存档,便于后期进行历史数据分析。
本发明公开的上述用于二氧化碳监测的巡检机器人的工作方法,解放了人力,自动化程度高,巡检效率高;能够进行常规路线的日常巡检和特殊情况下的手动控制巡检,灵活度高。
附图说明
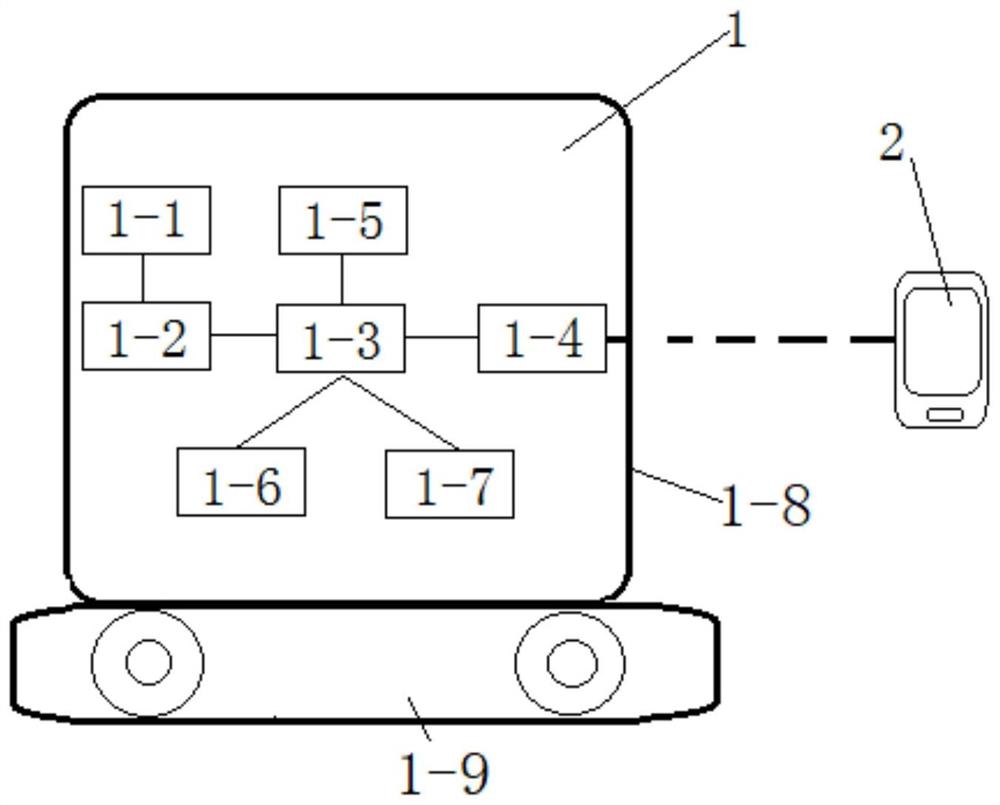
图1为本发明的整体结构示意图。
图中:1-二氧化碳报警装置;1-1-二氧化碳传感器模块;1-2-数据处理模块;1-3-控制模块;1-4-无线通讯模块;1-5-报警模块;1-6-定位模块;1-7-数据存储模块;1-8-外壳;1-9-载具;2-控制终端。
具体实施方式
下面结合附图对本发明做进一步详细描述,其内容是对本发明的解释而不是限定:
如图1,为本发明的用于二氧化碳监测的巡检机器人,包括外壳1-8和载具1-9,外壳1-8与载具1-9连接,外壳1-8内设有二氧化碳传感器模块1-1、数据处理模块1-2、控制模块1-3、无线通讯模块1-4、报警模块1-5和定位模块1-6;二氧化碳传感器模块1-1与数据处理模块1-2连接,控制模块1-3分别与数据处理模块1-2、无线通讯模块1-4、报警模块1-5、定位模块1-6和载具1-9连接;无线通讯模块1-4与控制终端2连接。
具体地,数据处理模块1-2包括信号放大模块、零点校正模块、线性化处理模块、补偿电路模块、误差修正模块、滤波模块和A/D模块;信号放大模块的一端与二氧化碳传感器模块1-1连接,另一端与零点校正模块连接,零点校正模块与线性化处理模块连接,线性化处理模块与补偿电路模块连接,补偿电路模块与误差修正模块连接,误差修正模块与滤波模块连接,滤波模块与A/D模块连接,A/D模块与控制模块1-3连接。
在本发明的一个较优的实施例中,控制模块1-3还连接有数据存储模块1-7,可以对日常监测数据进行存储,工作人员可以定期进行历史数据进行分析。
二氧化碳传感器模块1-1可以采用霍尼韦尔CRIR二氧化碳传感器。
控制模块1-3可以采用C8051FF09单片机。
控制终端2可以是手机、PDA、平板电脑或笔记本电脑。
无线通讯模块1-4可以是WIFI通讯模块或Zigbee通讯模块。
载具1-9包括动力系统和电源模块。电源模块可以采用可充电锂电池。动力系统可以采用轮式或履带式,优选履带式。
上述用于二氧化碳监测的巡检机器人的工作方法:
巡检机器人按照控制模块1-3内设置的日常巡检路线,通过载具1-9在目标检测区域内进行自动巡检,或由控制终端2控制进行巡检;二氧化碳传感器模块1-1实时监测区域内的二氧化碳浓度并将数据发送至数据处理模块1-2,数据经数据处理模块1-2处理后发送至控制模块1-3,控制模块1-3通过无线通讯模块1-4将数据和定位模块1-6产生的位置信息发送至控制终端2,同时,控制模块1-3预设有报警阈值,当二氧化碳浓度数值超过报警阈值时,报警模块1-5报警。
以上所述,仅为本发明实施方式中的部分,本发明中虽然使用了部分术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了方便的描述和解释本发明的本质,把它们解释成任何一种附加的限制都是与本发明精神相违背的。以上所述仅以实施例来进一步说明本发明的内容,以便于更容易理解,但不代表本发明的实施方式仅限于此,任何依本发明所做的技术延伸或再创造,均受本发明的保护。
- 一种用于二氧化碳监测的巡检机器人及其工作方法
- 一种用于矿区废弃地土壤检测的巡检机器人及工作方法