用于障碍物规避的方法和系统,涉及对转向系统和差动制动系统的控制
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及机动车辆领域,并且特别涉及用于防止碰撞的驾驶员辅助系统。
由于紧急情况下例如与另一车辆、行人或骑自行车者发生的碰撞、而造成的事故在道路交通事故中占很大比例。
已知的做法是使用驾驶辅助系统(例如自动紧急制动系统(其缩写为AEB))通过使用常规制动系统来规避机动车辆与所述车辆的行车道中的障碍物之间的碰撞。然而,存在很多不能通过这种紧急制动系统有效处理的情况,尤其是当机动车辆正以高速行驶时。具体而言,当机动车辆正以高速行驶并且所述车辆后面有另一车辆时,不可能规避碰撞或进行制动。在这种情况下,优选使车辆的车轮转向以实现侧向规避路径。
被称为自动回避转向(缩写为AES)的驾驶辅助系统是已知的并且使得能够通过激活转向/差动制动系统有限的持续时间以规避与障碍物的碰撞,从而规避碰撞。障碍物可以与机动车辆在相同行车道中,或者在相邻车道中。
设计安全且可靠的AES系统的其中一个目的是创造能够执行预定义规避路径的高性能、最优且鲁棒的控制器。在极端情况下,这涉及以可能高达160km/h的纵向速度自动换道。
机动车辆的稳定性限制和可控性限制对AES控制器的表现能力有很大影响。具体而言,需要限制电动助力转向的AES控制器所需的转矩的幅度和梯度,以使驾驶员一直能够收回对方向盘的手动控制。此外,需要限制车辆动力学(特别是诸如偏航角、横摆率),以避免可能危及驾驶员的轮胎与地面之间的抓力损失。
为了绕开这些关于机动车辆的可控性和稳定性的限制,已知的做法是将转向系统与差动制动系统结合起来。具体而言,转向系统在适中速度下特别有效,而差动制动系统改善了车辆在高速下的操纵动力学。此外,两个致动器的结合确保了良好的车辆稳定性,并且例如使得能够减少急转弯规避操作期间的滑移。
背景技术
可以参考例如文件WO 2007 73 772-A1,该文件描述了一种被配置用于控制转向系统和差动制动系统两者以规避车辆转向过度风险的系统。然而,该文件没有提出车辆的任何动态模型。
还可以参考文件FR 2 695 613-A1,该文件描述了一种用于通过向车辆的一个或多个车轮施加制动转矩来自动校正道路车辆类型的机动车辆横摆运动的发生的方法。该文件没有提出障碍物规避方法。
还已知的是文件EP 1 790 542-A1和KR 10 085 11 20,这些文件涉及仅基于用于车轮的差动制动的系统的车道偏离避免方法。然而,这些文件既没有解决遵循障碍物规避路径的问题,也没有解决车辆的可控性和稳定性问题。
因此,在自动规避障碍物的上下文中,需要优化对转向系统和差动制动系统这两个系统的同时控制,以便执行考虑了与车辆转矩相关联的可控性限制以及机动车辆的稳定性的规避路径。
发明内容
因此,本发明的目的是提出一种可靠且简单的障碍物规避系统和方法。
本发明的一个主题是一种障碍物规避方法,其中:
-检测机动车辆附近的障碍物并规划用于规避所述障碍物的路径,并且
-控制被配置用于操纵该规避路径的转向系统和/或差动制动系统。
有利地,在控制该转向系统和/或差动制动系统时,定义了可控性约束,在该约束中限制了转向转矩的幅度和梯度,并且定义了稳定性约束,在该约束中界定了该车辆的滑移率和横摆率。
例如,执行检查以确定是否遵守了该可控性约束,并且如果遵守了所述约束,则仅控制车轮的转向。
具体而言,在这种情况下,一旦所需的转向转矩受可控性界线界定,车轮的转向就足以执行规避操作。在这种情况下,来自差动制动的贡献为零。
另一方面,如果未遵守所述约束,则控制该差动制动系统。
例如,当侧向规避偏移量与纵向规避距离之比过大时。
在这种情况下,差动制动需要生效以便协助转向并且正确地遵循规避路径。如果差动制动没有贡献,那么实现的路径将是不正确的并且可能危及机动车辆。
参数α
例如,可以假定以下假设:
-该转向转矩的幅度和梯度没有超过可控性限制,
-该规避路径是预定义的,
-通过横摆力矩对该差动制动的行为建模;以及
-路径曲率为零。
本发明的第二方面涉及一种用于控制转向系统和/或差动制动系统的模块,并且该模块被配置用于向机动车辆的车轮转向计算机发送车轮转向设定点,并向所述机动车辆的制动计算机发送横摆力矩设定点。
有利地,该模块包括用于该转向系统的闭环控制器,该闭环控制器被配置用于遵循参考规避路径并对该车辆的稳定性约束做出响应。
例如,该模块进一步包括前馈控制器,该前馈控制器被配置用于补偿路径偏离对路径遵循误差的影响。
该模块还可以包括用于该差动制动系统的闭环控制器,该闭环控制器被配置用于改善转向环的性能,特别是在转矩饱和以及车辆稳定的情况下。
本发明的第三方面涉及一种障碍物规避系统,该障碍物规避系统包括:障碍物检测模块,该障碍物检测模块检测机动车辆附近的障碍物并且规划用于规避所述障碍物的障碍物规避路径;以及如上文所述的控制模块,该控制模块用于控制转向系统和/或差动制动系统。
本发明的另一方面涉及一种机动车辆,该机动车辆包括:用于确定该机动车辆相对于其行车道的位置的系统(诸如例如,前置相机),并且该系统能够确定在视线距离处相对于车道标记的侧向偏移以及所述车辆的相对航向角;检测该车辆的路径中的障碍物的障碍物检测系统(例如,前置雷达),该障碍物检测系统被配置用于确定该障碍物相对于所述车辆的纵向距离和重叠度;陀螺仪;自动动力转向;如上文所述的控制模块,该控制模块控制转向系统和/或差动制动系统;计算机,该计算机被配置用于将来自所述控制模块的转向角设定点转换为对该动力转向的转矩限制以便执行转向;计算机,该计算机被配置用于将来自所述控制模块的横摆力矩设定点转换为车轮处的转矩以便执行差动制动;以及传感器,该传感器测量方向盘的转动角度和转动速率。
附图说明
通过阅读以下仅仅通过非限制性示例给出的并参照所附附图作出的说明,本发明的进一步目的、特征和优点将变得显而易见,在附图中:
-图1示意性地描绘了由根据本发明的障碍物规避系统进行的障碍物规避操作,该障碍物规避系统包括控制模块,该控制模块控制被配置用于操纵规避路径的转向(DAE)系统和/或差动制动系统;
-图2示意性地描绘了图1的障碍物规避系统;
-图3展示了由图1的系统实施的障碍物规避方法的流程图;
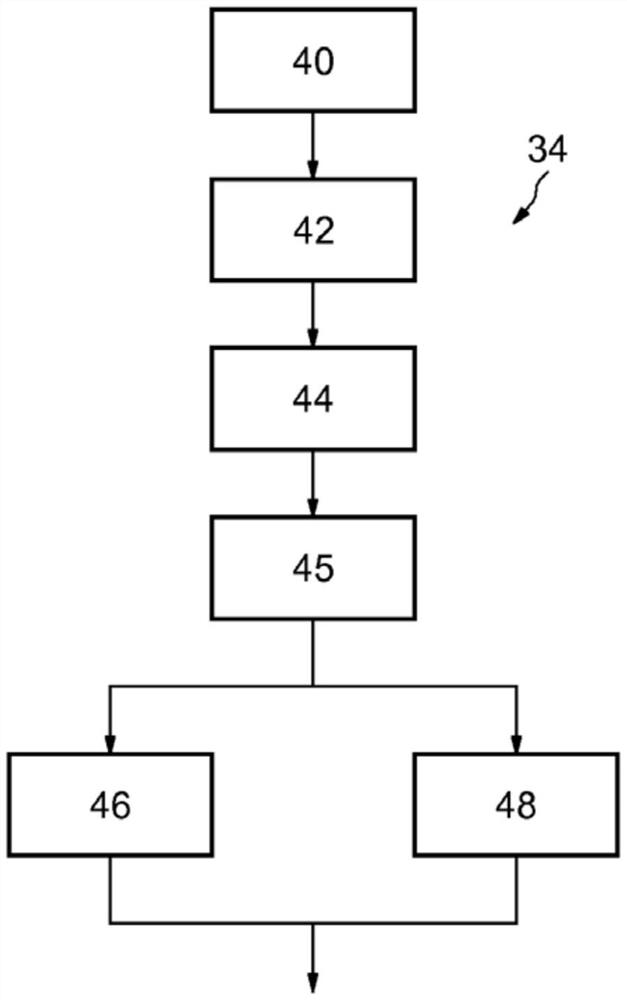
-图4展示了控制被配置用于操纵规避路径的转向(DAE)系统和/或差动制动系统的步骤的细节。
图1非常示意性地描绘了由障碍物规避系统10进行的障碍物规避操作。
障碍物规避系统10包括:障碍物检测模块12,该障碍物检测模块检测机动车辆2附近的障碍物1并且规划用于规避所述障碍物的障碍物规避路径;控制模块14,该控制模块控制被配置用于操纵规避路径的转向(DAE)系统和/或差动制动系统;以及模块16,该模块用于一旦该机动车辆与所述障碍物1相距预定距离就停止转向(DAE)系统和/或差动制动系统的操作。
机动车辆2包括用于确定该机动车辆相对于其行车道的位置的系统(诸如例如,前置相机),并且该系统能够确定在视线距离处相对于车道标记的侧向偏移yL以及所述车辆的相对航向角ΨL。机动车辆2还设置有检测车辆的路径中的障碍物的障碍物检测系统(例如前置雷达),该障碍物检测系统被配置用于确定障碍物相对于所述车辆的纵向距离和重叠度。
如图2所展示的,机动车辆2还包括:陀螺仪(未描绘);自动动力转向DAE,该自动动力转向能够执行由转向(DAE)系统和/或差动制动系统控制模块14生成的转矩设定点;计算机20,该计算机被配置用于将转向角设定点转换为对动力转向DAE的转矩限制以便执行转向;制动单元BRAKE UNIT,该制动单元能够执行由转向(DAE)系统和/或差动制动系统控制模块14生成的转矩设定点;计算机22,该计算机被配置用于将横摆力矩设定点转换为车轮处的转矩以便执行差动制动;以及传感器,该传感器用于测量方向盘的转动角度和转动速率。
转向(DAE)系统和/或差动制动系统控制模块14被配置用于向车轮转向计算机20发送车轮转向设定点δref,并向计算机22发送横摆力矩设定点MDB_Ref。
转向(DAE)系统和/或差动制动系统控制模块14包括用于该转向系统的闭环控制器24,该闭环控制器被配置用于遵循参考规避路径并对车辆的稳定性约束做出响应。
转向(DAE)系统和/或差动制动系统控制模块14进一步包括前馈控制器26,该前馈控制器被配置用于补偿路径偏离对路径遵循误差的影响。
最后,转向(DAE)系统和/或差动制动系统控制模块14包括用于该差动制动系统的闭环控制器28,并且该闭环控制器被配置用于改善转向环的性能,特别是在转矩饱和以及车辆稳定的情况下。
如图3所展示的,障碍物规避方法30包括:检测机动车辆2附近的障碍物1并且规划用于规避所述障碍物的障碍物规避路径的步骤32;控制被配置用于操纵规避路径的转向(DAE)系统和/或差动制动系统的步骤34;以及一旦该机动车辆与所述障碍物1相距预定距离就停止转向(DAE)系统和/或差动制动系统的操作的步骤36。
图4详细地展示了控制被配置用于操纵规避路径的转向(DAE)系统和/或差动制动系统的步骤34。
为了对受转向系统和差动制动系统控制的机动车辆的动力学建模,在步骤40做出了以下假设:
当转向转矩的幅度和梯度没有超过可控性限制时,通过以下方程对动力转向的行为建模:
其中,
[数学公式1]
其中:
δ是车辆的前轮与纵向轴线之间的角度,以rad表示;
δ
ξ和ω是两个常数,表示前轮的实际角度的特性。
做出的另一假设是,规避路径是预定的,通过横摆力矩对差动制动的行为建模。具体而言,横摆力矩由受计算机控制的制动单元产生,该计算机承载在车辆上并且将横摆力矩设定点转换为施加于每个车轮的制动转矩。
做出的最后假设是,假定曲率为零。如果曲率为非零,则可以容易计算出控制器
如果不能估计出通过差动制动产生的横摆力矩,则考虑以下方程:
[数学公式2]
其中:
β是偏航角,以rad表示;
r是横摆率,以rad/s表示;
y
Ψ
δ是车辆的前轮与纵向轴线之间的角度,以rad表示;
c
c
V是车辆沿纵向轴线的速度,以m/s表示;
M
α
如果可以估计出通过差动制动产生的横摆力矩,则考虑以下方程:
[数学公式3]
其中:
可以根据以下方程写出差动制动系统的动力学:
[数学公式4]
其中:
M
因此,将横摆力矩(旋转)及其动力学引入到对差动制动系统的控制中。此外,引入参数α
控制转向(DAE)系统和/或差动制动系统的步骤34进一步包括:定义可控性约束的步骤42,在该约束中限制了转矩TAES的幅度和梯度;以及定义稳定性约束的步骤44,在该约束中界定了该车辆的滑移率和横摆率r。
可以如下重写方程数学公式3:
[数学公式5]
其中:
[数学公式6]
可以以可变线性参数系统的形式来如下写出方程数学公式4:
[数学公式7]
其中:
[数学公式8]
控制转向(DAE)系统和/或差动制动系统的步骤34进一步包括:验证是否遵守或是否不再遵守可控性约束的步骤45;以及在遵守了可控性约束的情况下控制转向系统的步骤46。一旦所需的转向转矩受可控性界线界定,仅车轮的转向就足以实现规避操作。在这种情况下,差动制动的贡献为零。
在这种情况下,考虑以下模型来合成控制律:
[数学公式9]
其中:
α
可以根据以下方程写出方程数学公式9:
[数学公式10]
其中:
[数学公式11]
[数学公式12]
[数学公式13]
[数学公式14]
[数学公式15]
[数学公式16]
可以使用以下方程来计算增益
[数学公式17]
将
[数学公式18]
前馈
[数学公式19]
求解方程数学公式19得出:
[数学公式20]
控制转向(DAE)系统和/或差动制动系统的步骤34进一步包括在未遵守或不再遵守可控性约束的情况下控制差动制动系统的步骤48。例如,当侧向规避偏移量与纵向规避距离之比过大时。
在这种情况下,差动制动需要做出贡献以协助转向并且正确地遵循规避路径。如果差动制动没有贡献,那么遵循的路径将是不正确的并且可能危及机动车辆。
参数α
使用以下方程来计算参数α
[数学公式21]
[数学公式22]
其中,d
最后,函数
[数学公式23]
a
做出如下假设:
[数学公式24]
前馈增益
[数学公式7a]
最后一个目的是找到跟随静态状态返回控制律:
[数学公式25]
M
为此,考虑以下通用系统:
[数学公式26]
其中:
x
u
A
θ是具有
[数学公式27]
X
考虑基于以下形式的静态状态返回的控制器:
[数学公式28]
u
需要界定一些状态。该条件由以下方程表示:
[数学公式29]
其中:
该标准用于确保车辆在紧急(动态)操作期间的稳定性。通过应用以下不等式来保证稳定性约束:
[数学公式30]
|[0 1 0 0 0 0 0]x|≤r
[数学公式31]
|[1 0 0 0 0 0 0]x|≤β
为了响应关于有界状态的标准,需要满足以下条件。
[数学公式32]
为了响应关于闭环极点的标准,需要满足以下LMI条件:
[数学公式33]
A
[数学公式34]
[数学公式35]
其中,
在以上方程中,A
一旦解出了方程31至35,这就会给出静态状态返回向量K的值,该值将应用于转向系统和差动制动系统的控制律。
借助于本发明,自动计算控制器的增益K使得能够减少用于转向系统和制动系统的控制方法的设计时间。两步式转向和差动制动控制方法允许可追溯性,并且因此使得开发更容易。具体而言,执行控制转向的步骤以满足标称情况下的需求。然后针对特殊情况(转矩饱和等)执行控制差动制动的步骤。
此外,在仅使用一个参数α
贯穿本申请,曲率显然响应于道路的曲率,无论曲率是多少都能够应用本发明,并且当曲率为非零时,控制器
- 用于障碍物规避的方法和系统,涉及对转向系统和差动制动系统的控制
- 用于液压制动系统的设备、液压制动系统、用于与液压制动系统共同作用的控制装置以及用于运行液压制动系统的方法