电源装置
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及电源装置,特别涉及具备串联连接的多个电池模块的装置。
背景技术
关于将多个电池模块串联连接的电源装置进行了研究开发。电池模块具备电池以及开关电路,通过开关电路的切换将状态切换为从一对端子输出电池的电压的接通状态和使一对端子之间短路的关断状态中的任意一个状态。
在将多个电池模块串联连接的电源装置中,在最上级的电池模块与最下级的电池模块之间连接有负载。通过切换各电池模块的接通状态以及关断状态,从而基于处于接通状态的电池模块的电压被施加到负载。
在以下的日本特开2018-74709、日本特开2018-174029、日本特开2018-174607、日本特开2018-174626、日本特开2018-182782、日本特开2018-182783中,示出了将多个电池模块串联连接的电源装置。在这些专利文献所记载的电源装置中,从上级朝向下级依次进行使电池模块成为预定的激活时间的期间的接通状态的扫描开关处理。在扫描开关处理中,相比于上游侧的电池模块,在下游侧邻接的电池模块在延迟了预定的延迟时间的定时进行开关电路的接通关断控制。通过扫描开关处理,所期望的数量的电池模块中的电池的合成输出电压被施加到负载,电力从所期望的数量的电池模块中的各电池供给到负载。
发明内容
在将多个电池模块串联连接并进行扫描开关处理的电源装置中,因各电池模块的接通关断控制而产生噪声电压或者噪声电流。有时由于这些噪声而无法适当地进行电源装置的控制。
本发明的目的在于关于将多个电池模块串联连接的电源装置减轻电源装置产生的噪声对自身的动作造成的影响。
本发明提供一种电源装置,具备:串联连接的多个电池模块;以及控制单元,控制各所述电池模块,将电力从最上级以及最下级的所述电池模块供给到负载,所述电源装置的特征在于,所述控制单元执行接通关断控制,在所述接通关断控制中,在激活时间的期间使所述电池模块成为接通状态,在非激活时间的期间使所述电池模块成为关断状态,交替地重复所述激活时间以及所述非激活时间,对多个所述电池模块进行接通关断控制,以使相比于上级侧的所述电池模块,针对在下级侧邻接的所述电池模块的接通关断控制定时延迟控制延迟时间,对于最上级的所述电池模块的下级侧的各所述电池模块随机地决定所述控制延迟时间。
另外,本发明提供一种电源装置,具备:串联连接的多个电池模块;以及控制单元,控制各所述电池模块,将电力从最上级以及最下级的所述电池模块供给到负载,所述电源装置的特征在于,所述控制单元执行接通关断控制,在所述接通关断控制中,在激活时间的期间使所述电池模块成为接通状态,在非激活时间的期间使所述电池模块成为关断状态,交替地重复所述激活时间以及所述非激活时间,对多个所述电池模块进行接通关断控制,以使相比于上级侧的所述电池模块,针对在下级侧邻接的所述电池模块的接通关断控制定时延迟控制延迟时间,对于各所述电池模块随机地决定所述激活时间。
优选的是,所述控制单元对于各所述电池模块随机地决定将所述激活时间以及所述非激活时间相加而得的周期。
另外,本发明提供一种电源装置,具备:串联连接的多个电池模块;以及控制单元,控制各所述电池模块,将电力从最上级以及最下级的所述电池模块供给到负载,所述电源装置的特征在于,所述控制单元执行接通关断控制,在所述接通关断控制中,在激活时间的期间使所述电池模块成为接通状态,在非激活时间的期间使所述电池模块成为关断状态,交替地重复所述激活时间以及所述非激活时间,对多个所述电池模块进行接通关断控制,以使相比于上级侧的所述电池模块,针对在下级侧邻接的所述电池模块的接通关断控制定时延迟控制延迟时间,对于各所述电池模块随机地决定将所述激活时间以及所述非激活时间相加而得的周期。
优选的是,所述控制单元对于最上级的所述电池模块的下级侧的各所述电池模块随机地决定所述控制延迟时间。
优选的是,所述控制单元在使将所述激活时间与所述非激活时间相加而得的周期、所述激活时间以及所述控制延迟时间中的至少1个变化而控制针对所述负载的电力供给状态时,对于各所述电池模块随机地决定所述控制延迟时间。
优选的是,所述控制单元在使将所述激活时间与所述非激活时间相加而得的周期、所述激活时间以及所述控制延迟时间中的至少1个变化而控制针对所述负载的电力供给状态时,对于各所述电池模块随机地决定所述激活时间。
优选的是,所述控制单元在使将所述激活时间与所述非激活时间相加而得的周期、所述激活时间以及所述控制延迟时间中的至少1个变化而控制针对所述负载的电力供给状态时,对于各所述电池模块随机地决定所述周期。
优选的是,所述控制单元根据针对最上级的下级侧的任意的所述电池模块的接通关断控制定时,执行针对最上级的所述电池模块的接通关断控制。
根据本发明,能够减轻电源装置产生的噪声对自身的动作造成的影响。
附图说明
下面将参照附图说明本发明的示例性的实施例的特征、优点以及技术和工业上的意义,其中相同的符号表示相同的元件,其中:
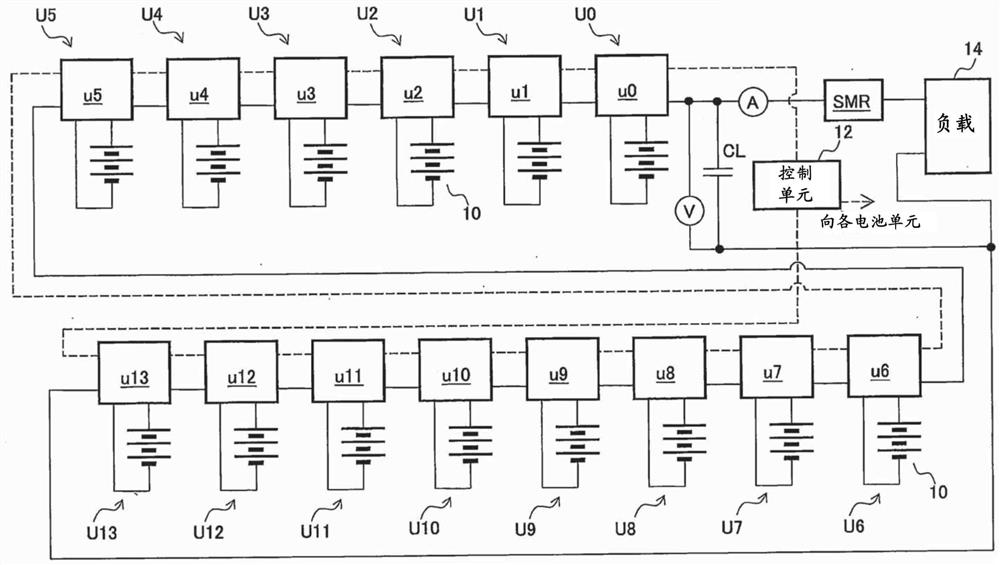
图1是示出电源装置的结构的图。
图2是示出电池模块的详细的结构的图。
图3是概念性地示出各控制信号的时序图的图。
图4是示出各控制信号的时序图的例子的图。
图5是概念性地示出延迟时间变动模式下的各控制信号的时序图的图。
图6是概念性地示出周期变动模式下的各控制信号的时序图的图。
图7是概念性地示出延迟时间、周期变动模式下的各控制信号的时序图的图。
图8是示出电源装置的结构的图。
图9是示出电源装置在基本模式下进行动作的情况下的仿真结果的图。
图10是示出电源装置在延迟时间变动模式下进行动作的情况下的仿真结果的图。
图11是示出电源装置在周期变动模式下进行动作的情况下的仿真结果的图。
图12是示出电源装置在延迟时间、周期变动模式下进行动作的情况下的仿真结果的图。
具体实施方式
(1)电源装置的结构
参照各图,说明本发明的实施方式的电源装置。关于在多个附图中示出的相同的构成要素附加相同的符号,省略其说明。
在图1中,示出了本发明的实施方式的电源装置的结构。电源装置具备电池模块U0~U13、控制单元12、负载电容器CL、系统主继电器开关SMR(以下,简称为SMR)、电压计V以及电流计A。电池模块U0~U13分别具备主体电路u0~u13。另外,各电池模块Ui具备两端与主体电路ui连接的电池10。在此,i为0~13中的任意整数。在图1中,用实线表示用于传送电力的电力线,利用虚线表示用于传送控制信号的控制线。电池模块U0~U13根据后述的电路结构,利用电力线以及控制线串联连接。在本实施方式的电源装置中,使用了14个电池模块U0~U13,但使用的电池模块的个数可以为两个以上的任意的个数。
最上级的电池模块U0连接于电流计A的一端。电流计A的另一端连接于SMR的一端,SMR的另一端连接于负载14的一端。最下级的电池模块U13连接于负载14的另一端。另外,在最上级的电池模块U0与负载14之间的电力线、和最下级的电池模块U13与负载14之间的电力线之间,负载电容器CL以及电压计V并联连接。
由电压计V测定的电压测定值以及由电流计A测定的电流测定值被输出到控制单元12。控制单元12根据电压测定值以及电流测定值中的至少一方,控制各电池模块Ui。控制单元12在对负载14供给电力时使SMR成为接通,在切断供给到负载14的电力时,使SMR成为关断。以下,说明SMR为接通时的电源装置的状态。
(2)电池模块的结构
在图2中,示出了电池模块Ui的详细的结构。电池模块Ui具备主体电路ui以及电池10。主体电路ui具备控制电路20、开关电路22、上游电力端子24、下游电力端子26、上游控制端子28以及下游控制端子30。开关电路22具备第1开关元件S1、第2开关元件S2以及模块内电容器Cm。第1开关元件S1的一端连接于上游电力端子24。第1开关元件S1的另一端连接于下游电力端子26。另外,第2开关元件S2的一端连接于上游电力端子24,第2开关元件S2的另一端连接于电池10的正极端子。电池10的负极端子连接于下游电力端子26。在第2开关元件S2与电池10的连接点、和下游电力端子26之间连接模块内电容器Cm。
作为第1开关元件S1以及第2开关元件S2的各个开关元件,可以使用MOSFET(MetalOxide Semiconductor Field Effect Transistor,金属氧化物场效应晶体管)、双极型晶体管、IGBT(Insulated Gate Bipolar Transistor,绝缘栅双极型晶体管)等半导体开关元件。在第1开关元件S1使用MOSFET的情况下,漏极端子连接于上游电力端子24,源极端子连接于下游电力端子26。在第2开关元件S2使用MOSFET的情况下,源极端子连接于上游电力端子24,漏极端子连接于电池10的正极端子。在各MOSFET的漏极端子与源极端子之间,二极管以阴极端子朝着漏极端子侧的方式连接。
在不使用MOSFET,而使用双极型晶体管或者IGBT的情况下,MOSFET的漏极端子以及源极端子分别对应于双极型晶体管以及IGBT的集电极端子以及发射极端子。在集电极端子与发射极端子之间,二极管以阴极端子朝着集电极端子侧的方式连接。
控制电路20的一端连接于上游控制端子28,控制电路20的另一端连接于下游控制端子30。控制信号Fi从控制电路20输出到第1开关元件S1,控制信号Gi从控制电路20输出到第2开关元件S2。在控制信号Fi的值为高时,第1开关元件S1成为接通,在控制信号Fi的值为低时,第1开关元件S1成为关断。同样地,在控制信号Gi的值为高时,第2开关元件S2成为接通,在控制信号Gi的值为低时,第2开关元件S2成为关断。控制信号Gi为使控制信号Fi的高和低的值反转的信号。
在第1开关元件S1为接通而第2开关元件S2为关断时,上游电力端子24与下游电力端子26之间短路,电池模块Ui成为关断状态。在第1开关元件S1为关断而第2开关元件S2为接通时,电池10的正极连接于上游电力端子24,电池10连接于上游电力端子24与下游电力端子26之间。由此电池模块Ui成为接通状态。
图1所示的电池模块U0~U13利用电力线以及控制线如以下说明那样串联连接。上级侧的开关电路22的下游电力端子26连接于在下级侧邻接的开关电路22的上游电力端子24。最上级的开关电路22的上游电力端子24经由电流计A以及SMR连接于负载14的一端。最下级的开关电路22的下游电力端子26连接于负载14的另一端。
另外,上级侧的控制电路20的下游控制端子30连接于在下级侧邻接的控制电路20的上游控制端子28。最上级的控制电路20的上游控制端子28、以及最下级的控制电路20的下游控制端子30连接于控制单元12。
(3)控制单元以及控制电路的硬件等
控制单元12以及各控制电路20可以包括执行从外部读入的程序或者自身存储的程序的处理器。在图1以及图2中,示出了控制单元12以及各控制电路20由单独的硬件构成的例子,但也可以是控制单元12以及各控制电路20的全部或者任意个由一个硬件一体地构成。
这样,电源装置具备串联连接的多个电池模块U0~U13和控制各电池模块U0~U13的控制单元12,将电力从最上级以及最下级的电池模块(U0、U13)供给到负载14。控制单元12执行如下接通关断控制:在激活时间的期间,使电池模块Ui成为接通状态,在非激活时间的期间,使电池模块Ui成为关断状态,交替地重复激活时间以及非激活时间。控制单元12对多个电池模块进行接通关断控制,以使相比于上级侧的电池模块,针对在下级侧邻接的电池模块的接通关断控制定时延迟控制延迟时间。由此,从上级朝向下级依次进行使电池模块成为预定的激活时间的期间的接通状态的扫描开关处理。
如后所述,控制单元12可以针对比最上级的电池模块U0靠下级侧的各电池模块U1~U13随机(random)地决定控制延迟时间。另外,控制单元12可以针对各电池模块U0~U13随机地决定激活时间。另外,控制单元12可以针对各电池模块U0~U13随机地决定将激活时间以及非激活时间相加而得到的周期。
(4)电源装置的各动作模式
本实施方式的电源装置在基本模式和噪声应对模式中的某一模式下进行动作。基本模式是关于邻接的电池模块的控制延迟时间为恒定且控制信号的周期为恒定的动作模式。噪声应对模式是关于邻接的电池模块的控制延迟时间发生变动或者控制信号Gi以及Fi的周期发生变动的动作模式。
(4-1)基本模式
说明基本模式下的动作。在图3中,概念性地示出了在电池模块U0~U13中从控制电路20对第2开关元件S2输出的控制信号G0~G13的时序图。在图3(G0)、(G1)、(G2)、(G3)……(G13)中,分别示出了在电池模块U0、U1、U2、U3……U13中从控制电路20输出到第2开关元件S2的控制信号G0、G1、G2、G3……G13。
在时刻t=t0,控制信号G0的值从低上升到高。控制信号G0的值在从时刻t=t0起经过了激活时间Ta时从高下降到低。控制信号G0的接通关断周期为T。即,控制信号G0的值在从时刻t0起经过了时间T的时刻,从低上升到高。控制信号G0的值以周期T重复高和低。1个周期中的激活时间的长度为Ta,1个周期中的非激活时间的长度为T-Ta。
控制信号G1、G2、G3……G13分别为使控制信号G0延迟控制延迟时间D、2D、3D……13D的信号。即,控制信号Gj为使控制信号G0延迟了控制延迟时间j·D的信号。其中,j为1~13中的任意整数。
在将接通状态的电池模块的个数设为n个的情况下,控制单元12以如下方式设定周期T、激活时间Ta以及控制延迟时间D。即,在i+n为13以下时,控制单元12针对各控制电路20设定周期T、激活时间Ta以及控制延迟时间D,以使在控制信号Gi的值从高下降到低的时刻使控制信号G(i+n)从低上升到高。在i+n超过13时,控制单元12针对各控制电路20设定周期T、激活时间Ta以及控制延迟时间D,以使在控制信号Gi的值从高下降到低的时刻使控制信号G(i+n-14)从低上升到高。由此,电池模块U0~U13中的n个电池模块成为接通状态,14-n个电池模块成为关断状态。在周期T、设为接通状态的电池模块的个数n、控制延迟时间D以及激活时间Ta中存在T=(14-n)D+Ta的关系。当电池模块U0~U13各自中的电池10的输出电压为E的情况下,n·E电压被施加到负载14。
控制单元12获取由电压计V测定的电压测定值以及由电流计A测定的电流测定值。控制单元12可以根据电压测定值以及电流测定值来求出电力测定值。控制单元12可以以使电压测定值成为目标范围内的值的方式、或者以使电流测定值成为目标范围内的值的方式决定设为接通状态的电池模块的个数n、控制延迟时间D、激活时间Ta以及周期T。或者,控制单元12可以以使电力测定值成为目标范围内的值的方式,决定设为接通状态的电池模块的个数n、控制延迟时间D、激活时间Ta以及周期T。
负载电容器CL抑制被施加到负载14的电压的变动。被施加到负载14的电压的变动例如通过各电池模块Ui所具备的开关电路22的开关处理而产生。另外,开关电路22所具备的模块内电容器Cm抑制在上游电力端子24与下游电力端子26之间产生的电压的变动。在上游电力端子24与下游电力端子26之间产生的电压的变动例如通过开关电路22所具备的开关元件的开关处理而产生。
在图4中,示出了控制信号G0~G13的时序图的例子。在该例子中,接通状态的电池模块的个数n为n=7,电池模块U0~U13中的7个电池模块为接通状态,7个电池模块为关断状态。以在控制信号G7的值从高下降到低的时刻使控制信号G0从低变成高的方式,决定周期T、激活时间Ta以及延迟时间D。当电池模块U0~U13各自中的电池10的输出电压为E的情况下,对负载14施加7E的电压。
说明图2所示的各电池模块Ui的基本模式下的动作。各电池模块Ui中的控制电路20根据控制单元12的控制以如下方式动作。控制电路20在输入到上游控制端子28的上游、控制电压从低上升到高时,在从上游、控制电压从低上升到高时起经过了控制延迟时间i·D时,使第2开关元件S2从关断成为接通,使第1开关元件S1从接通成为关断。控制电路20在从使第2开关元件S2从关断成为接通并使第1开关元件S1从接通成为关断时起经过了激活时间Ta时,使第2开关元件S2从接通成为关断,使第1开关元件S1从关断成为接通。
控制电路20在上游、控制电压从低上升到高时,在从上游、控制电压上升时起经过了控制延迟时间i·D时,使从下游控制端子30输出的下游、控制电压从低上升到高。然后,在从使下游、控制电压上升时起经过了激活时间Ta时,使下游、控制电压从高下降到低。
控制单元12将如图3所示的控制信号G0输入到电池模块U0的上游控制端子28。电池模块U0依照控制信号G0而成为接通状态或者关断状态。各电池模块Ui在从控制信号G0的值上升起经过了控制延迟时间i·D时成为接通状态,将接通状态维持激活时间Ta的期间之后成为关断状态。
如上所述,电池模块U0~U13各自的开关电路22具备第1开关元件S1以及第2开关元件S2,这些开关元件S1以及S2交替地重复接通关断。由此,有时在电力线以及控制线中产生特定频率的噪声电压或者噪声电流(以下,简称为噪声),控制单元12以及各控制电路20无法适当地动作。因而,电源装置也可以在接下来说明的噪声抑制模式下进行动作。
(4-2)噪声抑制模式
作为噪声抑制模式,有延迟时间变动模式以及周期变动模式。延迟时间变动模式为针对电池模块U0~U13分别将控制延迟时间设为随机地分散的值的动作模式。周期变动模式为针对电池模块U0~U13分别将接通状态以及关断状态切换的周期设为随机地分散的值的动作模式。在周期变动模式下,也可以控制延迟时间针对电池模块U0~U13的各电池模块为恒定。
(4-2-1)延迟时间变动模式
在图5中,概念性地示出了延迟时间变动模式下的控制信号G0~G5的时序图。时刻t=t0~t5分别为在基本模式下控制信号G0~G5的值从低上升到高的时刻。如图5所示,控制信号G1~G5的值分别在从时刻t=t1~t5起前后随机地偏离的时刻上升。即,控制信号G1~G5的值上升的时刻相对于基本模式下的上升时刻随机地分散。此外,在从时刻t=t1~t5各自起前后随机地偏离的各时刻也包括时刻t=t1~t5(上升时刻的偏离为0的情况)。控制信号G0~G5的值当在从低上升到高之后经过了激活时间Ta时下降。
在图5中,示出了控制信号G0~G5,但控制信号G6~G13也与控制信号G0~G5同样地变化。即,控制信号G6~G13的值在从在基本模式下上升的时刻随机地偏离的时刻上升。控制信号G6~G13的值当在从低上升到高之后经过了激活时间Ta时下降。
控制信号G0的周期Tx成为将针对电池模块U1~Un的控制延迟时间α1~αn加到基本模式下的周期T地进行合计而得到的时间Tx。即,控制信号G0的周期根据Tx=T+α1+α2+α3+·····+αn=(14-n)D+Ta+Σαj的关系确定。在此,Σ意味着对于j=1~n进行相加合计。n为接通状态的电池模块的个数。这样,控制信号G0的值当在从低上升到高之后经过了激活时间Ta时下降,在从先前的上升时刻起经过了Tx=(14-n)D+Ta+Σαj时再次上升。
参照图1以及图2,说明延迟时间变动模式下的电源装置的具体的动作。控制单元12针对电池模块U1~U13分别决定基准延迟时间d1~d13。基准延迟时间d1~d13通过与在基本模式下求出控制延迟时间的处理同样的处理来求出。即,将电池模块U1的基准延迟时间d1设为D,存在dj=j·D的关系。
控制单元12针对电池模块U1~U13分别将延迟调整时间δ1~δ13决定成随机地分散的正负的值。控制单元12求出对基准延迟时间d1~d13分别加上延迟调整时间δ1~δ13而得到的值,作为针对电池模块U1~U13中的各电池模块的控制延迟时间α1~α13。即,控制单元12根据αj=dj+δj的关系,求出控制延迟时间αj。控制单元12将控制延迟时间α1~α13分别输出到电池模块U1~U13的控制电路20。延迟调整时间δj可以在相对于基准延迟时间dj为±5%的范围内决定。即,在延迟调整时间δj与基准延迟时间dj之间可以存在-0.05dj≤δj≤0.05dj的关系。
控制单元12也可以代替与基准延迟时间d1~d13相加的延迟调整时间δ1~δ13,而将与基准延迟时间d1~d13相乘的延迟调整系数Δ1~Δ13决定成随机地分散的正的值。在该情况下,控制单元12求出分别将延迟调整系数Δ1~Δ13与基准延迟时间d1~d13相乘而得到的值,作为针对电池模块U1~U13中的各电池模块的控制延迟时间α1~α13。即,控制单元12根据αj=Δj·dj的关系,求出控制延迟时间αj。延迟调整系数Δj可以为使基准延迟时间dj在±5%的范围变化的系数。即,Δj可以为0.95以上1.05以下的值。
电池模块U0所具备的控制电路20在延迟时间变动模式下的动作与基本模式下的动作相同。电池模块U1~U13各自中的控制电路20根据控制单元12的控制以如下方式动作。当输入到上游控制端子28的上游、控制电压从低上升到高时,在从上游、控制电压由低上升到高时起经过了控制延迟时间αj时,控制电路20使第2开关元件S2从关断成为接通,使第1开关元件S1从接通成为关断。控制电路20在从使第2开关元件S2从关断成为接通并使第1开关元件S1从接通成为关断时起经过了激活时间Ta时,使第2开关元件S2从接通成为关断,使第1开关元件S1从关断成为接通。
当上游、控制电压从低上升到高时,在从上游、控制电压由低上升到高时起经过了控制延迟时间αj时,控制电路20使从下游控制端子30输出的下游、控制电压从低上升到高。然后,在从使下游、控制电压由低成为高时起经过了激活时间Ta时,使下游、控制电压从高下降到低。
控制单元12将图5所示的控制信号G0输入到电池模块U0的上游控制端子28。电池模块U0依照控制信号G0而成为接通状态或者关断状态。各电池模块Uj在从控制信号G(j-1)的值上升起经过了控制延迟时间αj时成为接通状态,将接通状态维持激活时间Ta的期间。
控制单元12根据电池模块Un中的控制电路20的下游控制端子30的电压下降的定时,使针对电池模块U0的控制信号G0的值从低上升到高。控制信号G0的周期为Tx=(14-n)D+Ta+Σαj,根据各电池模块Uj的控制延迟时间αj的分散适当地设定从控制信号G0的之前的上升至接下来的上升为止的时间。
此外,控制单元12也可以根据比最上级的电池模块U0靠下级侧的电池模块U1~U13中的任意电池模块中的控制电路20的下游控制端子30的电压上升的定时或者下降的定时,识别使针对电池模块U0的控制信号G0的值从低上升到高的定时,而使控制信号G0的值从低上升到高。
根据延迟时间变动模式的动作,控制延迟时间α1~α13成为随机地分散的时间,所以在电力线以及控制线中产生的噪声的频率发生变动。由此,抑制特定的频率的噪声对控制单元12或者各控制电路20造成的影响。
(4-2-2)周期变动模式
说明噪声抑制模式中的周期变动模式。在图6中,概念性地示出了周期变动模式下的控制信号G0~G5的时序图。
如图6所示,控制信号G1~G5的激活时间Ta0~Ta5分别相对于基本模式下的激活时间Ta随机地分散,控制信号G1~G5的周期随机地分散。在图6中,示出了控制信号G0~G5,但控制信号G6~G13也与控制信号G0~G5同样地发生变化。即,控制信号G6~G13的激活时间相对于基本模式下的激活时间Ta随机地分散,控制信号G1~G5的周期随机地分散。
参照图1以及图2,说明周期变动模式下的电源装置的动作。控制单元12针对电池模块Ui分别决定与基本模式下的控制延迟时间相同的控制延迟时间di=i·D。另外,将基准模式下的激活时间Ta决定成周期变动模式下的基准激活时间TTa。
控制单元12针对电池模块U0~U13分别将激活调整时间γ0~γ13决定成随机地分散的正负的值。控制单元12求出分别将激活调整时间γ0~γ13与基准激活时间TTa相加而得的值,作为针对电池模块U0~U13中的各电池模块的激活时间Ta0~Ta13。即,控制单元12根据Tai=TTa+γi的关系,求出激活时间Tai。控制单元12将控制延迟时间d1~d13分别输出到电池模块U1~13的控制电路20。另外,控制单元12将激活时间Ta0~Ta13分别输出到电池模块U0~U13的控制电路20。可以在相对于基本模式下的周期T为±2%的范围内决定激活调整时间γi。即,在激活调整时间γi与基本模式下的周期T之间可以存在-0.02T≤γi≤0.02T的关系。
控制单元12也可以代替与基准激活时间TTa相加的激活调整时间γ0~γ13,而将与基准激活时间TTa相乘的激活调整系数Γ0~Γ13决定成随机地分散的正的值。在该情况下,控制单元12求出将激活调整系数Γ0~Γ13与基准激活时间TTa相乘而得到的值,作为针对电池模块U1~U13中的各电池模块的激活时间Ta0~Ta13。即,控制单元12根据Tai=Γi·TTa的关系,求出激活时间Tai。激活调整系数Γi可以为使激活时间在±2%的范围变化的系数。即,Γi可以为0.98以上1.02以下的值。
电池模块U0~U13各自中的控制电路20根据控制单元12的控制以如下方式动作。当输入到上游控制端子28的上游、控制电压从低上升到高时,在从上游、控制电压由低上升到高时起经过了控制延迟时间di时,控制电路20使第2开关元件S2从关断成为接通,使第1开关元件S1从接通成为关断。控制电路20在从使第2开关元件S2由关断成为接通并使第1开关元件S1由接通成为关断时起经过了激活时间Tai时,使第2开关元件S2从接通成为关断,使第1开关元件S1从关断成为接通。
控制电路20当上游、控制电压从低成为高时,在从上游、控制电压由低上升到高时起经过了控制延迟时间di时,使从下游控制端子30输出的下游、控制电压从低上升到高。然后,在从使下游、控制电压从低成为高时起经过了激活时间Tai时,使下游、控制电压从高下降到低。
控制单元12将图6所示的控制信号G0输入到电池模块U0的上游控制端子28。电池模块U0依照控制信号G0成为接通状态或者关断状态。各电池模块U1~U13分别在控制信号G0的值上升之后经过了控制延迟时间d1~d13时成为接通状态,分别将接通状态维持激活时间Ta1~Ta13的期间。
控制单元12根据电池模块Un中的控制电路20的下游控制端子30的电压下降的定时,使针对电池模块U0的控制信号G0的值从低上升到高。控制信号G0的周期成为Tx=(14-n)D+Ta+γn。其中,n为接通状态的电池模块的个数。这样,根据各电池模块的激活时间的分散适当地设定从控制信号G0的之前的上升至接下来的上升为止的时间。
此外,控制单元12也可以根据比最上级的电池模块U0靠下级侧的电池模块U1~U13中的任意电池模块的控制电路20的下游控制端子30的电压上升的定时或者下降的定时,识别使针对电池模块U0的控制信号G0的值从低上升到高的定时,而使控制信号G0的值从低上升到高。
根据周期变动模式的动作,激活调整时间γ0~γ13随机地分散,关于各电池模块,接通关断控制的周期成为分散的时间。因此,在电力线以及控制线中产生的噪声的频率发生变动。由此,抑制特定的频率的噪声对控制单元12或者各控制电路20造成的影响。
(4-2-3)延迟时间、周期变动模式
接下来,说明延迟时间、周期变动模式。延迟时间、周期变动模式为将延迟时间变动模式与周期变动模式进行组合后的模式。在图7中,概念性地示出了延迟时间、周期变动模式下的控制信号G0~G5的时序图。
时刻t=t0~t5分别为在基本模式下控制信号G0~G5的值从低上升到高的时刻。时刻t=τ0~τ5分别为当假设将激活时间设为恒定值Ta的情况下控制信号G0~G5的值从高下降到低的时刻。
如图7所示,控制信号G1~G5的值分别在从时刻t=t1~t5起前后随机地偏离的时刻上升。即,控制信号G1~G5的值上升的时刻相对于在基本模式下各控制信号上升的时刻随机地分散。另外,控制信号G1~G5的激活时间Ta0~Ta5分别相对于基本模式下的激活时间Ta随机地分散。
在图7中,示出了控制信号G0~G5,但控制信号G6~G13也与控制信号G0~G5同样地变化。即,控制信号G6~G13的值在从基本模式下上升的时刻随机地偏离的时刻上升,控制信号G6~G13的激活时间相对于基本模式下的激活时间随机地分散。
根据延迟时间、周期变动模式的动作,控制信号G0~G13的控制延迟时间以及周期成为分散的时间。因此,在电力线以及控制线中产生的噪声的频率发生变动。由此,抑制特定的频率的噪声对控制单元12或者各控制电路20造成的影响。
(5)模式切换处理
在电源装置通过基本模式的动作对负载14供给电力时,控制单元12可以获取由电压计V测定的电压测定值以及由电流计A测定的电流测定值,执行如下处理。控制单元12在电压测定值不处于目标范围内的情况、电流测定值不处于目标范围内的情况、或者电力测定值不处于目标范围内的情况下,使基本模式下的、周期、激活时间以及控制延迟时间中的至少1个(以下,将周期、激活时间以及控制延迟时间中的至少1个称为参数时间)变化,使被施加到负载14的电压变化。即,控制单元12在电压测定值不处于目标范围内的情况、电流测定值不处于目标范围内的情况、或者电力测定值不处于目标范围内的情况下,使电池模块U0~U13中的设为接通状态的电池模块的个数变化。
这样,在使基本模式的控制参数时间变化而控制针对负载14的电力供给状态的电力控制处理中,控制信号G0~G13中的多个控制信号所包含的特定的频率分量有时在使控制参数时间变化的过程中相互强化。由此,有时在控制线以及电力线中产生的噪声增大,控制单元12或者各控制电路20无法适当地动作。因而,电源装置可以在未执行电力控制处理的通常时在基本模式下进行动作,在执行电力控制处理的电力控制时,在延迟时间变动模式、周期变动模式或者延迟时间、周期变动模式中的任意模式下进行动作。
例如,在电力控制处理中,控制单元12以使电压测定值、电流测定值或者电力测定值进入到目标范围内的方式,使控制参数时间以预定的时间间隔按照预定的刻度宽度变化。控制单元12在使控制参数时间按照预定的刻度宽度变化的期间,在延迟时间变动模式、周期变动模式或者延迟时间、周期变动模式中的任意模式下进行动作。然后,在使控制参数时间为恒定时,在基本模式下进行动作。
根据这样的模式切换处理,抑制在使控制参数时间变化的过程中在控制线以及电力线中产生的特定的频率的噪声。另外,在延迟时间变动模式、周期变动模式或者延迟时间、周期变动模式的动作中,在电力线中流过的电流的纹波分量有时比基本模式大。因而,在通常时在基本模式下进行动作,在电力控制处理时在延迟时间变动模式、周期变动模式或者延迟时间、周期变动模式中的任意模式下进行动作,从而避免在电力线中流过的电流中大的纹波分量长时间地流动。
(6)针对各电池模块的直接的控制
在上述中,说明了电池模块U0~U13中的控制电路20被串联连接的实施方式。在该实施方式中,上级侧的控制电路20将下游、控制电压输出到下级侧的控制电路20,下级侧的控制电路20根据从上级侧的控制电路20输出的下游、控制电压来控制开关电路22。也可以不这样串联连接控制电路20,而是控制单元12直接控制电池模块U0~U13各自中的控制电路20。在图8中,示出了执行那样的控制的电源装置的结构。控制单元12将周期、控制延迟时间、激活时间等控制信息和表示控制定时的定时信号直接输出到电池模块U0~U13各自所具备的控制电路20。各控制电路20根据从控制单元12提供的控制信息以及表示控制定时的定时信号来控制开关电路22。
(7)仿真结果
在图9中,示出了当电源装置在基本模式下进行动作的情况下求出在电力线中流过的电流的频谱的仿真结果。横轴表示频率,纵轴表示频率分量的等级。关于以下的仿真结果的横轴以及纵轴也相同。高次谐波分量中的第7次高次谐波分量50以及第13次高次谐波分量52的等级比其它高次谐波分量的等级大。
在图10中,示出了当电源装置在延迟时间变动模式下进行动作的情况下求出在电力线中流过的电流的频谱的仿真结果。延迟调整时间δj在相对于基准延迟时间dj为±5%的范围内变动。在该仿真结果中,相对于基本模式,第7次高次谐波分量50的等级减少21%。
在图11中,示出了当电源装置在周期变动模式下进行动作的情况下求出在电力线中流过的电流的频谱的仿真结果。周期在相对于基本模式下的周期T为±2%的范围内变动。在该仿真结果中,相对于基本模式,第7次高次谐波分量50的等级减少42%。
在图12中,示出了当电源装置在延迟时间、周期变动模式下进行动作的情况下求出在电力线中流过的电流的频谱的仿真结果。延迟调整时间δj在相对于基准延迟时间dj为±5%的范围内变动。另外,周期在相对于基本模式下的周期T为±2%的范围内变动。在该仿真结果中,相对于基本模式,第7次高次谐波分量50的等级减少45%。
上述各实施方式的电源装置可以搭载于电动汽车、混合动力汽车等电动汽车。一般而言,在与驱动以及再生用的电动发电机之间交换电力的直流电源装置被搭载于电动汽车。本发明的各实施方式的电源装置可以被用作搭载于电动汽车的直流电源装置。
- 电源装置和使用该电源装置的电动车辆以及蓄电装置、电源装置用紧固构件、电源装置的制造方法、电源装置用紧固构件的制造方法
- 电源装置和具有该电源装置的电动车辆以及蓄电装置、电源装置用紧固构件、电源装置用紧固构件的制造方法、电源装置的制造方法