基于空域-极化域自适应的主瓣干扰下极化面阵波达方向估计方法
文献发布时间:2023-06-19 11:35:49
技术领域
本发明属于阵列信号处理领域,具体涉及基于空域-极化域自适应的主瓣干扰下极化面阵波达方向估计方法。
背景技术
导弹拦截敌方目标,需要精准获取目标的波达方向(Direction of Arrival,DOA)。然而,当前演习或实战中敌方往往施放的干扰都是主瓣干扰,这将大大降低导弹截获目标的概率。针对旁瓣干扰,雷达通过空域自适应处理可以滤除大部分干扰信号,自适应单脉冲测角精度较高;对于主瓣干扰,空域自适应处理会带来主瓣畸变,进而导致自适应单脉冲测角精度低的问题。因此,在这种背景下,主瓣干扰是亟需解决的重大军事难题。
从空域上解决主瓣干扰问题效果不佳,那么能不能从其他域想办法呢?当然有!极化是电磁波信号的重要属性,挖掘目标与干扰间的极化域差异是对抗主瓣干扰的重要发展趋势。极化自适应是将接收极化设置成与干扰极化正交,从而可从极化域滤除干扰,其好处是不会带来主瓣畸变的问题,因而测角精度会更高。然而,当多个干扰的极化方式不一样时,雷达经过极化自适应后的测角性能会急剧下降,其原因是极化自适应仅能滤除一种极化方式的干扰。
上述问题促使雷达技术人员探索出了空域-极化域联合自适应技术,它是利用干扰和信号在空域和极化域的差异联合抑制干扰、增强信号。但经过空域-极化域联合自适应后该如何测角,鲜有公开报道。
综上所述,结合实装雷达一般采用面阵的实际,本发明探索基于空域-极化域自适应的主瓣干扰下极化面阵波达方向估计方法。
发明内容
鉴于此,本发明提供了基于空域-极化域自适应的主瓣干扰下极化面阵波达方向估计方法,以解决主瓣干扰下的目标DOA估计问题。
为了实现上述的发明目的,本发明提供了基于空域-极化域自适应的主瓣干扰下极化面阵波达方向估计方法,包括以下技术步骤:
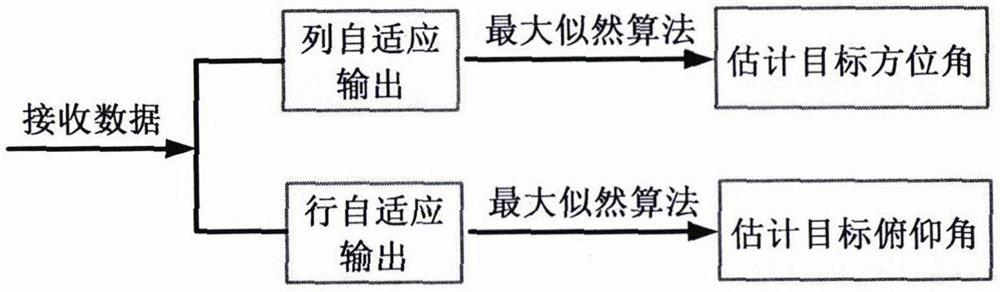
(1)根据面阵的每列阵元接收数据得到空域-极化域联合自适应权,输出一行线阵的数据;
(2)采用最大似然法算法求出目标的方位角;
(3)根据面阵的每行阵元接收数据得到空域-极化域联合自适应权,输出一列线阵的数据;
(4)采用最大似然法算法求出目标的俯仰角。
本发明的优点在于通过空域-极化域联合自适应,可对抗主瓣内多个干扰,而主瓣干扰下的空域自适应会造成主波束畸变而导致目标角度估计精度低的问题,极化自适应虽不会造成主波束畸变,但其仅能对抗主瓣内的一个干扰。
附图说明
图1是本发明的实施例的结构框图。参照图1,本发明的实施例由求列自适应输出、最大似然算法求目标方位角、行自适应输出以及最大似然算法求目标俯仰角组成。
具体实施方式
下面结合附图和具体实施例,进一步阐明本发明。假设阵列是由正交电偶极子组成的M
该面阵的空域导向矢量表示为
其中
其中,
其中,
其中,s
基于上述信号模型,本发明的详细主要步骤如下:
(1)根据面阵的每列阵元接收数据得到空域-极化域联合自适应权,输出一行线阵的数据。首先通过选择矩阵选取第g(g=1,2,…,M
其中
根据最大信干噪比准则,求得第g列阵元的空域-极化域联合自适应权为
其中,(·)
那么,根据每列阵元可得到一个自适应通道输出,考虑阵列共有M
(2)采用最大似然法算法求出目标的方位角。新的行阵数据协方差矩阵为
其中L表示快拍数。将方位角θ设置在一定空域范围内搜索,固定俯仰角
其中,tr(·)表示求矩阵的迹,
通过找到式(13)与谱峰对应的角度即为目标方位角。
(3)根据面阵的每行阵元接收数据得到空域-极化域联合自适应权,输出一列线阵的数据。首先通过选择矩阵选取第i(i=1,2,…,M
其中
根据最大信干噪比准则,求得第i行阵元的空域-极化域联合自适应权为
则其自适应通道输出为
那么,根据每行阵元可得到一个自适应通道输出,考虑阵列共有M
(4)采用最大似然法算法求出目标的俯仰角。新的列阵数据协方差矩阵为
将俯仰角
其中
通过找到式(22)与谱峰对应的角度即为目标俯仰角。
虽然结合附图描述了本发明的实施方式,但是本领域普通技术人员可以在所附权利要求的范围内做出各种变形或修改。
- 基于空域-极化域自适应的主瓣干扰下极化面阵波达方向估计方法
- 主瓣干扰下极化阵列子阵级空域-极化域联合自适应测角方法