基于特征融合等势星球图的故障信号诊断方法
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及滚动轴承故障信号诊断领域,尤其涉及一种基于特征融合等势星球图的故障信号诊断方法。
背景技术
滚动轴承作为旋转机械的重要零部件,被广泛运用在机械设备和工业生产中。在长期的生产和使用中,滚动轴承容易发生故障,影响机械设备安全运行。如何有效地对滚动轴承故障信号诊断对于机械设备的可靠运行具有重要意义。
传统的轴承故障信号的特征提取如傅里叶变换、小波变换、分形维数等方法都存在简单、单一、线性、鲁棒性不强等缺点,不能保证诊断结果的可靠性和准确性。因此如何提高轴承故障诊断的可靠性和准确性成为当下研究的重点。
发明内容
针对上述现有技术中的不足,本发明提供一种基于特征融合等势星球图的故障信号诊断方法,通过对故障信号进行熵特征提取,将融合熵特征映射为图像的二维坐标,并对映射后的图像进行点密度计算和着色生成融合特征熵的等势星球图,为故障诊断领域等相关的工程实践提供可靠的理论依据。
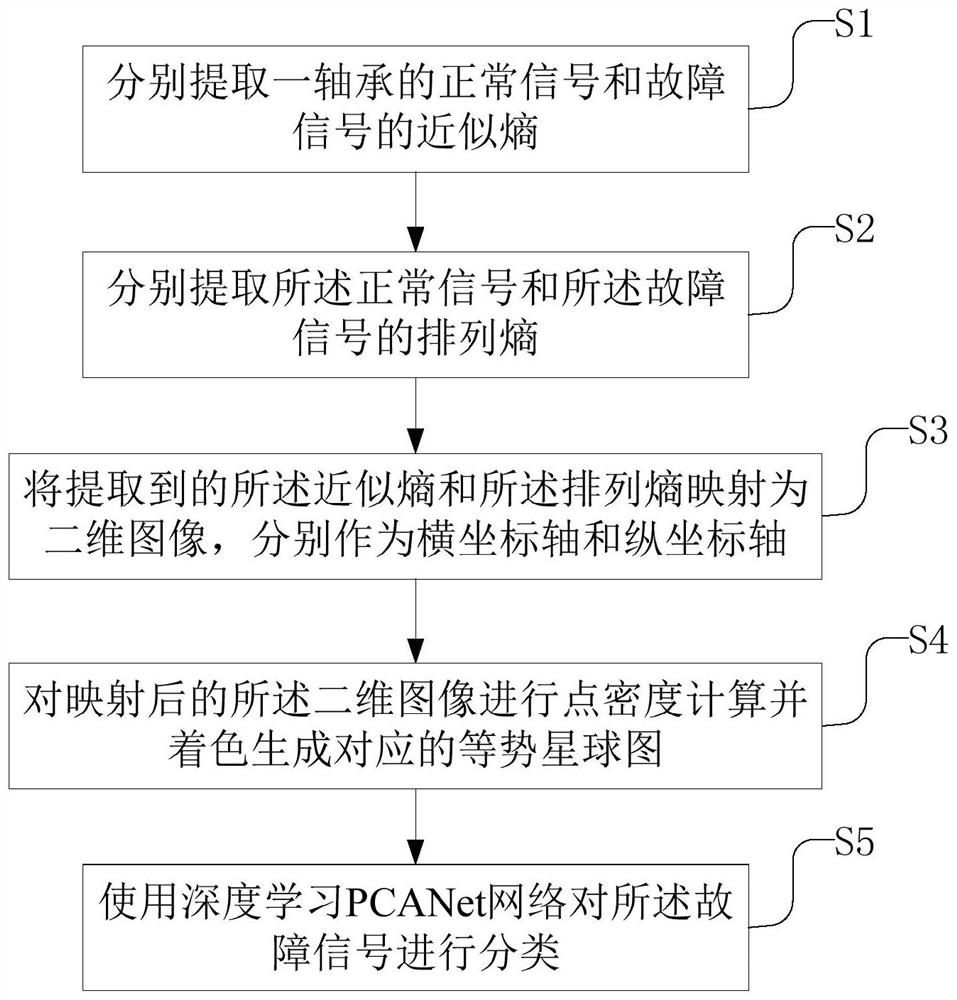
为了实现上述目的,本发明提供一种基于特征融合等势星球图的故障信号诊断方法,包括步骤:
S1:分别提取一轴承的正常信号和故障信号的近似熵;
S2:分别提取所述正常信号和所述故障信号的排列熵;
S3:将提取到的所述近似熵和所述排列熵映射为二维图像,分别作为横坐标轴和纵坐标轴;
S4:对映射后的所述二维图像进行点密度计算并着色生成对应的等势星球图;
S5:使用深度学习PCANet网络对所述故障信号进行分类。
优选地,所述近似熵满足公式:
ApEn(m,r)=φ
其中ApEn(m,r)表示近似熵,m为预先选定的模式维数,r为预先选定的相似容限,φ
所述近似熵的计算包括步骤:
S11:设存在一个以等时间间隔采样获得的N维的时间序列u(1),u(2),…u(N),重构m维向量X(1),X(2),…X(N-m+1),X(i)=[u(i),u(i+1),…u(i+m-1)],其中1i≤N-m+1;
S12:对每一个i值计算矢量X(i)与其余矢量X(j)之间的距离d[X(i),X(j):
d[X(i),X(j)=max
S13:给定阈值r(r>0),对每一个i值统计d[X(i),X(j)<r的数目及此数目与总的矢量个数N-m+1的比值,记为
S14:将
S15:根据公式(1)计算获得所述近似熵。
优选地,所述排列熵满足公式:
其中H
所述排列熵的计算步骤包括:
S21:设一时间序列X(i),其中i=1,2…n,对其进行相空间重构,得到重构矩阵:
其中:m为嵌入维数,τ为延时时间,K为矩阵的行数,K作为重构分量的个数;
S22:将所述重构矩阵中的第j个重构分量,按照数值大小重新进行升序排列,x(i+(j
S23:计算X(i)发生的概率P
S24:根据公式(5)计算所述排列熵。
优选地,所述S3步骤中,将所述近似熵和所述排列熵分别作为横坐标轴和纵坐标轴映射为二维图像;生成融合熵特征二维图像,将所述轴承的所述正常信号和所述故障信号的特征信号转换为图像。
优选地,所述S4步骤中,根据公式(6)进行所述点密度计算:
其中,其中,v和t表示数据点的二维坐标轴,w和h表示窗函数的二维坐标轴;x
本发明由于采用了以上技术方案,使其具有以下有益效果:
本发明将熵特征与等势星球图相结合,利用近似熵和排列熵分别提取故障信号特征,提出基于融合熵特征等势星球图的概念,具有提取速度快,提取特征明显的优势,通过实验表明此特征提取方法表现出良好的类间分离度和类内聚集度。最后,利用PCANet网络模型简单、计算速度快的特点,对故障信号特征进行分类,实验结果表明准确率可达到100%。
附图说明
图1为本发明实施例的基于特征融合等势星球图的故障信号诊断方法的流程图;
图2为本发明实施例的故障信号近似熵分布图;
图3为本发明实施例的排列熵分布图;
图4为本发明实施例的融合熵特征映射后的二维图像;
图5为本发明实施例的融合熵特征映射后的等势星球图。
具体实施方式
下面根据附图1~图5,给出本发明的较佳实施例,并予以详细描述,使能更好地理解本发明的功能、特点。
请参阅图1~图5,本发明实施例的一种基于特征融合等势星球图的故障信号诊断方法,包括步骤:
S1:分别提取一轴承的正常信号和故障信号的近似熵;
优选地,所述近似熵满足公式:
ApEn(m,r)=φ
其中ApEn(m,r)表示近似熵,m为预先选定的模式维数,r为预先选定的相似容限,φ
所述近似熵的计算包括步骤:
S11:设存在一个以等时间间隔采样获得的N维的时间序列u(1),u(2),…u(N),重构m维向量X(1),X(2),…X(N-m+1),X(i)=[u(i),u(i+1),…u(i+m-1)],其中1≤i≤N-m+1;
S12:对每一个i值计算矢量X(i)与其余矢量X(j)之间的距离d[X(i),X(j):
d[X(i),X(j)=max
S13:给定阈值r(r>0),对每一个i值统计d[X(i),X(j)<r的数目及此数目与总的矢量个数N-m+1的比值,记为
S14:将
S15:根据公式(1)计算获得所述近似熵。
S2:分别提取所述正常信号和所述故障信号的排列熵;
优选地,所述排列熵满足公式:
其中H
所述排列熵的计算步骤包括:
S21:设一时间序列X(i),其中i=1,2…n,对其进行相空间重构,得到重构矩阵:
其中:m为嵌入维数,τ为延时时间,K为矩阵的行数,K作为重构分量的个数;
S22:将所述重构矩阵中的第j个重构分量,按照数值大小重新进行升序排列,x(i+(j
S23:计算X(i)发生的概率P
S24:根据公式(5)计算所述排列熵。
S3:将提取到的所述近似熵和所述排列熵映射为二维图像,分别作为横坐标轴和纵坐标轴;
优选地,所述S3步骤中,将所述近似熵和所述排列熵分别作为横坐标轴和纵坐标轴映射为二维图像;生成融合熵特征二维图像,将所述轴承的所述正常信号和所述故障信号的特征信号转换为图像。
S4:对映射后的所述二维图像进行点密度计算并着色生成对应的等势星球图;
优选地,所述S4步骤中,根据公式(6)进行所述点密度计算:
其中,其中,v和t表示数据点的二维坐标轴,w和h表示窗函数的二维坐标轴;x
S5:使用深度学习PCANet网络对所述故障信号进行分类。
利用深度学习PCANet网络模型简单、计算速度快的特点,能够适应不同任务、不同数据类型,对故障信号特征进行分类。
本发明实施例的一种基于特征融合等势星球图的故障信号诊断方法,分别提取近似熵和排列熵特征映射为二维图像,经过点密度计算并着色生成等势星球图,最后利用深度学习网络进行分类。
本实施例选取美国凯斯西储大学轴承数据集,电机驱动端深沟球轴承型号为SKF6205,利用16通道的数据记录仪采集滚动轴承振动信号,采样频率12kHz,电机转速为1797r/min,直径分别为0.178、0.356和0.553mm。整个数据集在相同转速和相同负载下不同直径下的正常信号,内圈故障信号,滚动体故障信号,外圈故障信号的十种状态。
请参见图2,选取0.178mm相同直径下,内圈故障信号,滚动体故障信号,外圈故障信号的数据集,以每2000个数据为一个样本,提取各自的近似熵,横轴表示样本点数,纵轴表示近似熵。
通过MATLAB对故障数据集进行仿真,仿真结果如图2所示,可以看出近似熵对不同故障信号的特征提取取得了良好的类间分离度。
请参见图3,选取0.178mm相同直径下,内圈故障信号,滚动体故障信号,外圈故障信号的数据集,以每2000个数据为一个样本,提取各自的排列熵,横轴表示样本点数,纵轴表示排列熵。
通过MATLAB对故障数据集进行仿真,仿真结果如图3所示,可以看出近似熵对不同故障信号的特征提取取得了良好的类间分离度。
请参见图4,选取0.178mm相同直径下内圈故障信号数据集,分别提取到的近似熵和排列熵映射为二维图像。
请参见图5,将故障信号的近似熵和排列熵映射到二维坐标,再使用密度窗函数在星座图上进行滑动,密度窗函数计算窗中有多少个点,根据点数的不同表示不同的密度,不同的密度标记不同的颜色。黄色表示高密度区域,绿色表示中密度区域,蓝色表示低密度区域,生成基于特征融合的等势星球图。
为了验证特征提取的类内聚集度,选取0.178mm相同直径下的内圈故障信号,1-4000表示内圈故障数据集的前4000个点,依次类推,选择内圈故障数据样本每4000个点为一组共8组,每2000个点分别作为二维坐标进行仿真实验。
0.178mm内圈故障信号正常样本点等势星球图的类内聚集度,通过MATLAB进行仿真,对比8组结果可以看出0.178mm内圈故障信号正常样本点等势星球图表现出良好的类内聚集度。分别对正常信号和不同直径下内圈故障、滚动体故障、外圈故障下的等势星球图进行仿真,也表现出相同的类内聚集度。
选取0.178mm相同直径下,内圈故障信号,滚动体故障信号,外圈故障信号的数据集,分别取数据集前2000个点为横轴,后2000个点为纵轴,再经过矩阵窗函数进行点密度计算并着色,生成正常样本点等势星球图。
正常样本点下正常信号与不同故障信号的等势星球图,通过MATLAB对轴承故障数据集进行仿真,分别得到正常信号、内圈故障、滚动体故障、外圈故障下的正常样本点等势星球图,可以看出不同故障信号下的等势星球图是互异,表现出良好的类间分离度。
为了验证特征提取的类内聚集度,选取0.178mm相同直径下的内圈故障信号,1-120000表示提取数据集前120000个点,以此类推,100个点提取一个近似熵和排列熵为一组,1200组近似熵和排列熵,再映射到二维坐标上,经过矩阵窗函数进行点密度计算并着色,生成融合熵特征等势星球图。
0.178mm融合熵特征内圈故障信号等势星球图的类内聚集度,通过MATLAB进行仿真,对比8组结果可以看出内圈故障信号等势星球图表现出良好的类内聚集度。分别对正常信号和不同直径下内圈故障、滚动体故障、外圈故障下的融合熵特征等势星球图进行仿真,也表现出相同的类内聚集度。
选取0.178mm相同直径下,内圈故障信号,滚动体故障信号,外圈故障信号的数据集,提取各自的近似熵,排列熵,再映射到二维坐标上,经过矩阵窗函数进行点密度计算并着色,生成融合熵特征等势星球图。
0.178mm融合熵特征不同故障信号等势星球图的类间聚集度,通过MATLAB对轴承故障数据集进行仿真,分别得到正常信号、内圈故障、滚动体故障、外圈故障下的等势星球图,可以看出不同故障信号下的融合熵特征等势星球图是互异,表现出良好的类间分离度。
分别对轴承故障数据集提取正常样本点和融合熵特征等势星球图作为测试数据集,测试数据集为正常信号和不同直径下内圈故障信号、滚动体故障信号、外圈故障信号共7类,每类样本数200张,训练样本数160张,验证样本数40张。使用PCANet网络分别进行测试,表1为正常样本点和融合熵特征等势星球图分类对比表。
表1正常样本点和融合熵特征等势星球图分类对比表
通过测试对比发现,基于熵特征等势星球图在特征提取时间和准确性方面效果较好,证实此方法具有一定的工程应用价值。
以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本发明将以所附权利要求书界定的范围作为本发明的保护范围。
- 基于特征融合等势星球图的故障信号诊断方法
- 一种基于差分等势星球图的射频信号基因特征提取方法