控制装置
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及搭载于具有蓄电装置的车辆的控制装置。
背景技术
作为这种控制装置,提出搭载于具有蓄电装置(主电池)的车辆(电动车辆)的装置(例如,参照日本特开2014-150664)。蓄电装置与多个电气路径(正极线、负极线)连接。在该装置中,通过用户拔出安装于多个电气路径中的与辅机负载连接的电气路径的保险丝,从而切断该电气路径。由此降低暗电流。
发明内容
在车辆由于运输而长期不使用时等与通常的车辆的使用状况不同的特殊的状况下,为了抑制未使用车辆的期间中的蓄电装置的充电量降低,期望降低暗电流。在上述控制装置中,用户拔出保险丝而切断电气路径,但有时用户会忘记拔出保险丝,从而导致蓄电装置的充电量降低。因此,期望更可靠地切断电气路径,从而更可靠地降低暗电流。
本发明提供能够更可靠地降低暗电流的控制装置。
本发明的一个方案的控制装置搭载于具有连接多个电气路径的蓄电装置的车辆。所述车辆包括:外部信号识别装置,构成为根据车外的图像或者车外的信号而识别预定图像或者预定信号;外部环境识别装置,构成为在由所述外部信号识别装置识别出预定图像或者预定信号时,不管本车的系统是否启动,都根据所述本车的周边环境识别预定环境;以及继电器,与所述多个电气路径中的至少1个对象电气路径连接。所述控制装置包括处理器,该处理器构成为在由所述外部环境识别装置持续预定时间以上识别出所述预定环境的次数为预定次数以上时,使所述继电器断开。
根据本发明的一个方案的控制装置,在由外部环境识别装置持续预定时间以上识别出预定环境的次数为预定次数以上时,使继电器断开。由此,能够在适当地识别出车辆的状况的基础上,断开继电器。其结果,能够更适当地抑制暗电流。在此,“预定图像或者预定信号”可以预先确定为如下的图像、信号等:在城市的一般道路、高速道路上等通常的车辆行驶环境中不会遇到的特别的图像、信号。“预定环境”可以预先确定为如下环境等:在利用车辆搬运船或车辆搬运列车等运输车辆时遇到的特别的环境。
在本发明的一个方案的控制装置中,所述外部信号识别装置也可以构成为:将一维码的图像或二维码的图像以及多个图像图案中的至少1个识别为所述预定图像。根据本发明的一个方案的控制装置,能够利用外部信号识别装置更可靠地识别预定图像。
另外,在本发明的一个方案的控制装置中,所述外部信号识别装置也可以构成为:将以与家用交流电源的频率不同的频率发光的光信号、或者以与所述家用交流电源的频率不同的频率且以预定图案发光的光信号识别为所述预定信号。根据本发明的一个方案所涉及的控制装置,外部信号识别装置能够更可靠地识别预定信号。“预定图案”也可以为反复与家用交流电源的频率不同的多个频率的图案等。
进而,在本发明的一个方案的控制装置中,所述外部环境识别装置也可以构成为:将所述本车与相邻车辆之间的车间距离小于预定距离、所述本车以预定振动模式振动、所述本车的倾斜度为预定倾斜度以上、所述本车的加速度为预定加速度、车外的声音为预定声音中的至少1个识别为所述预定环境。根据本发明的一个方案的控制装置,外部环境识别装置能够更可靠地识别预定环境。作为“预定距离”,也可以预先确定为比在城市、自家等通常的驻车环境中车辆遇到的距离短的车间距离的距离等。“预定振动”也可以预先确定为如下振动等:在通常的驻车环境中车辆不会遇到的、在利用车辆搬运列车或车辆搬运船等搬运车辆时特有的振动。“预定倾斜度”也可以预先确定为如下倾斜度:在通常的驻车环境中车辆不会遇到的、在利用车辆搬运列车或车辆搬运船等搬运车辆时特有的倾斜度。“预定加速度”也可以预先确定为如下的加速度:在通常的驻车环境中车辆不会遇到的、在利用车辆搬运列车或车辆搬运船等搬运车辆时特有的加速度。“预定声音”也可以预先确定为如下声音:在通常的驻车环境中车辆不会遇到的、在利用车辆搬运列车或车辆搬运船等搬运车辆时特有的声音。
而且,在本发明的一个方案的控制装置中,所述车辆也可以包括至少1个电气安装件,该电气安装件在搬运过程中的驻车时不需要供给电力,在非搬运过程中的驻车时需要供给电力。所述对象电气路径与所述蓄电装置和所述电气安装件连接。根据本发明的一个方案的控制装置,能够更适当地切断电气路径。
附图说明
下面将参考附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,在附图中,相同的附图标记表示相同的部件,其中:
图1是示出搭载有作为本发明的一个实施例的控制装置的汽车20的概略结构的结构图。
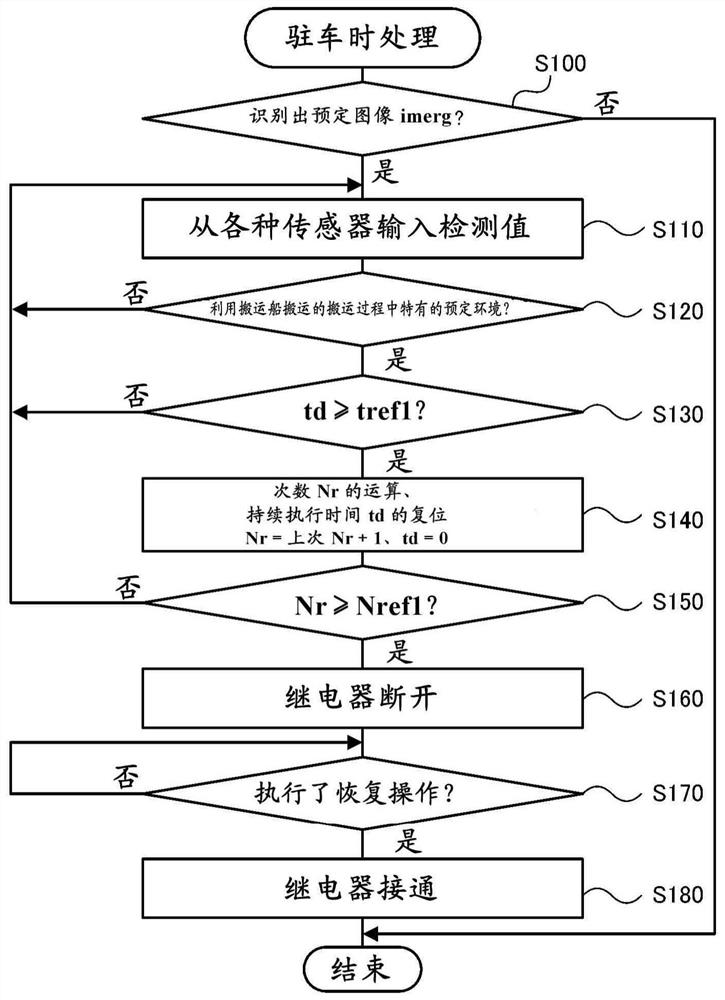
图2是示出由电源ECU40执行的驻车时处理例程的一个例子的流程图。
图3是用于说明车辆搬运船的内部的说明图。
具体实施方式
接下来,利用实施例来说明具体实施方式。
图1是示出搭载有作为本发明的一个实施例的控制装置的汽车20的概略结构的结构图。汽车20构成为能够利用来自马达的动力行驶的电动车辆,该马达从未图示的行驶用的蓄电池接受电力而进行驱动,汽车20具备蓄电池22、继电器25、外部信号识别装置30以及电源用电子控制单元(以下称为“电源ECU”)40。
蓄电池22构成为额定电压比未图示的行驶用的蓄电池低的锂离子二次电池。来自多个电气安装件的电线(电气路径)经由电线(电气路径)24连接于蓄电池22。作为多个电气安装件,可以例举出导航装置26、电源ECU40、控制马达等驱动系统的驱动用电子控制单元(以下称为“驱动ECU”)50、外部信号识别装置30、车载照相机32、振动传感器42、间隙声纳44a~44d、收音麦克风46等。对蓄电池22经由电线(电气路径)24连接有与导航装置26连接的电线(电气路径)28、与电源ECU40连接的电线(电气路径)41、与驱动ECU50连接的电线(电气路径)54以及虽然图示但与外部信号识别装置30、车载照相机32、振动传感器42、间隙声纳44a~44d、收音麦克风46连接的各个电线(电气路径)。不论车辆系统是否起动,蓄电池22都向电线24供给电力。
继电器25安装于电线28。
外部信号识别装置30构成为以未图示的CPU为核心的微型控制器,除了CPU以外,还具备存储处理程序的ROM、临时存储数据的RAM、输入输出端口、通信端口(都未图示)等。在系统起动后,车载照相机32每隔预定时间(例如每隔0.5秒)对车辆的外部进行拍摄,来自该车载照相机32的图像信号经由输入端口输入外部信号识别装置30。
外部信号识别装置30将基于来自车载照相机32的图像信号的车辆外部的图像和预先存储于ROM的预定图像Imref进行对照,在车辆外部的图像和预定图像Imref一致的情况下,判定为识别出预定图像Imref。预定图像Imref可以是:预先确定为在城市的一般道路和高速道路上等通常的车辆行驶环境中不会遇到的特别的图像的1个图像(例如二维码或一维码的图像等)、或预先确定的多个图像图案。在实施例中,将预定图像Imref设为预先确定的QR码(日本注册商标)的图像。
电源ECU40构成为以未图示的CPU(处理器)为核心的微型控制器,除了CPU以外,还具备存储处理程序的ROM、临时存储数据的RAM、输入输出端口、通信端口(都未图示)等。
来自各种传感器的信号经由输入端口输入到电源ECU40。作为输入到电源ECU40的信号,例如,可以例举出来自作为能够检测车辆的振动的加速度传感器的振动传感器42的车辆振动Vib、来自安装于车辆的四角的间隙声纳44a~44d的检测信号Sca~Scd、来自安装于车室内并检测声音的收音麦克风46的声音信号Sm等。另外,还可以例举来自点火开关(IG)48的点火信号Sig。进而,还可以例举来自外部信号识别装置30的识别结果Re等。从电源ECU40,经由输出端口输出各种控制信号。作为从电源ECU40输出的信号,例如,可以例举向继电器25的驱动控制信号等。电源ECU40与驱动ECU50经由通信而交换各种数据。不管车辆系统是否起动,电源ECU40都从蓄电池22接受电力的供给而进行动作。
电源ECU40根据来自安装于车辆的四角的间隙声纳44a~44d的检测信号Sca~Scd,运算到位于四角方向的对象物(障碍物)的距离Lfl、Lfr、Lrl、Lrr。
接下来,说明这样构成的汽车20的动作,特别是厂商将车辆搭载到车辆搬运船并长距离运输时的动作。图2是示出由电源ECU40执行的驻车时处理例程的一个例子的流程图。当车辆在点火开关48断开而系统停止的状态下驻车时,执行该例程。此外,即使在车辆系统停止时,导航装置26、外部信号识别装置30、车载照相机32、电源ECU40、振动传感器42、间隙声纳44a~44d、收音麦克风46、驱动ECU50仍利用来自蓄电池22的电力执行动作。
在执行本例程后,电源ECU40的CPU根据来自外部信号识别装置30的识别结果Re,判定外部信号识别装置30是否识别出预定图像Imref(步骤S100)。在此,说明车辆搬运船的内部。
图3是用于说明车辆搬运船的内部的说明图。如图所示,在车辆搬运船的内部,显示有与预先存储于外部信号识别装置30的ROM的预定图像Imref相同的对照用图像Im。车辆一边利用车载照相机32对车辆的外部进行拍摄,一边在厂商的业务员等的驾驶下,从车辆搬运船的入口进入到车辆搬运船的内部,在内部行驶,并在预定的驻车位置停车,之后,断开点火开关48,系统停止。此时,在车载照相机32拍摄的图像中包括对照用图像Im。在此情况下,外部信号识别装置30将表示识别出预定图像Imref的识别结果Re输入到电源ECU40。因此,步骤S100为判定车辆是否在车辆搬运船的内部行驶的处理。
当在步骤S100中外部信号识别装置30未识别出预定图像Imref时,判断为是车辆在用户的通常的使用范围内驻车,而并非用于利用搬运船进行运输的驻车,结束本例程。
当在步骤S100中外部信号识别装置30识别出预定图像Imref时,判断为车辆为用于利用搬运船进行运输的驻车,而并非在用户的通常的使用范围内的驻车,接下来,作为各种传感器的检测值,输入来自振动传感器42的车辆振动Vib、运算出的车辆的四角到对象物(障碍物)的距离Lfl、Lfr、Lrl、Lrr以及来自收音麦克风46的声音信号Sm(步骤S110)。
接下来,根据输入的各种传感器的检测值,判定是否识别出周边环境是利用车辆搬运船进行搬运的过程中特有的预定环境(步骤S120)。在步骤S120中,在如下所述的三个条件中的至少1个成立时,判定为识别为周边环境是在利用车辆搬运船进行搬运过程中特有的预定环境,上述三个条件为:车辆振动Vib是搭载于在海上航行中的车辆搬运船的车辆所特有的振动的第1条件;车辆的四角到对象物(障碍物)的距离Lfl、Lfr、Lrl、Lrr中的至少1个小于预定距离(例如20cm、25cm、30cm等)的第2条件;来自收音麦克风46的声音信号Sm是表示在搭载于在海上航行中的车辆搬运船的车辆中检测出的特有的声音的信号的第3条件。
在步骤S120中周边环境并非预定环境时,判断为存在车辆并非处于利用车辆搬运船搬运的过程中的可能性,返回到步骤S110的处理,反复进行步骤S110、S120,直至在步骤S120中周边环境被识别为在利用车辆搬运船搬运的过程中特有的预定环境为止。
在步骤S120中周边环境是搬运过程中特有的预定环境时,判断为车辆处于利用车辆搬运船搬运的过程中的可能性非常高,判定持续执行步骤S120的判定的持续执行时间td是否为预定时间tref1以上(步骤S130)。预定时间tref1例如被设定为25分钟、30分钟、35分钟等。
在步骤S130中持续执行时间td小于预定时间tref1时,返回到步骤S110,反复进行步骤S110~S130的处理,直至在步骤S130中持续执行时间td为预定时间tref1以上。此外,在步骤S120中周边环境并非搬运过程中特有的预定环境时,持续执行时间td被复位为值0。
在步骤S130中持续执行时间td是预定时间tref1以上时,接下来,使持续执行时间td为预定时间tref1以上的次数的上次值(上次Nr)增加值1,运算次数Nr,并且将持续执行时间td复位为值0(步骤S140)。上次Nr在车辆系统关停而最初执行步骤S140时被设定为值0。
接下来,判定次数Nr是否为预定次数Nref1以上(步骤S150)。预定次数Nref1是用于判定可否确定车辆处于通过车辆搬运船搬运过程中的阈值,例如被设定为4次、5次、6次等。
在步骤S150中次数Nr小于预定次数Nref1时,判断为无法确定车辆处于利用车辆搬运船的搬运过程中,返回到步骤S110,反复进行步骤S110~S150的处理,直至在步骤S150中次数Nr为预定次数Nref1以上。
在步骤S150中次数Nr是预定次数Nref1以上时,判断为也可以确定为车辆处于利用车辆搬运船的搬运过程中,向继电器25发送驱动控制信号,使继电器25断开(步骤S160)。在确定为车辆处于利用车辆搬运船的搬运过程中的基础之上,通过驱动控制信号使继电器25断开,所以与通过人工拔出保险丝的情况相比,能够可靠地切断电线28,切断从蓄电池22向导航装置26的电力供给。
在步骤S160中断开继电器25而切断从蓄电池22向导航装置26的电力供给的理由如以下所述。关于导航装置26,在并非搬运过程中的用户通常的使用范围内,在驻车时进行目的地的设定的情形较多,所以最好在车辆处于并非搬运过程中的驻车时向导航装置26供给电力。在车辆处于利用车辆搬运船的搬运过程中时,不通过导航装置26进行路线引导,所以切断向导航装置26的电力供给而停止导航装置26也没有关系。即,导航装置26在搬运过程中的驻车时不需要供给电力、在并非搬运过程中的驻车时需要供给电力。在步骤S160中断开继电器25时,通过切断电力供给,导航装置26的电力消耗消失,所以能够更可靠地降低暗电流,能够更可靠地抑制蓄电池22的电池耗尽。
在这样断开继电器25后,接下来,判定是否进行了恢复操作(步骤S170)。恢复操作预先确定为如下操作:在利用车辆搬运船长期运输车辆的途中临时将车辆从车辆搬运船卸下时、改变车辆的驻车位置时等厂商的业务员等希望将继电器25重新恢复到接通(ON)时的操作。恢复操作例如也可以为在预定时间tref2内使点火开关48从断开到接通预定次数Nref2以上的操作。预定时间tref2例如被设定为10秒、15秒、20秒等。预定次数Nref2例如被设定为3次、4次、5次等。
在步骤S170中未执行恢复操作时,反复进行步骤S170,在断开继电器25的状态下待机。
在步骤S170中执行了恢复操作时,接通继电器25(步骤S180),结束本例程。由此,通过执行恢复操作,接通继电器25,能够在长期的搬运的途中临时将车辆从车辆搬运船卸下时、改变车辆的驻车位置时,接通继电器25,使车辆行驶。
根据搭载有以上说明的实施例的控制装置的汽车20,在持续预定时间tref1以上识别出搬运过程中特有的预定环境的次数Nr为预定次数Nref1数以上时,断开继电器25,从而能够更可靠地抑制暗电流。
外部信号识别装置30能够将一维码的图像或二维码的图像以及多个图像图案识别为预定图像Imref,所以外部信号识别装置30能够更可靠地识别预定图像Imref。
另外,电源ECU40如下条件中的至少1个成立时,识别为周边环境是搬运过程中特有的预定环境,所以能够更可靠地识别预定环境,该条件为:车辆振动Vib是搭载于在海上航行中的车辆搬运船的车辆特有的振动的第1条件;车辆的四角到对象物(障碍物)的距离Lfl、Lfr、Lrl、Lrr中的至少1个小于预定距离(例如20cm、25cm、30cm等)的第2条件;来自收音麦克风46的声音信号Sm是表示在搭载于在海上航行中的车辆搬运船的车辆中检测的特有的声音的信号的第3条件。
进而,将继电器25安装于来自导航装置26的电线(电气路径)28,所以能够更适当地切断电线(电气路径),该导航装置26在搬运过程中的驻车时不需要供给电力,在并非搬运过程中的驻车时需要供给电力。
在搭载有实施例的控制装置的汽车20中,将外部信号识别装置30设为能够将一维码的图像或者二维码的图像以及多个图像图案中的至少1个识别为预定图像Imref,并在搬运船内部显示预定图像Imref。然而,也可以将外部信号识别装置30设为能够识别以与日本的家用交流电源的2个频率(50Hz以及60Hz)不同的频率(例如110Hz、170Hz等)发光的光信号、或者以与家用交流电源的频率不同的频率且以预定图案发光的光信号来作为预定信号,并在搬运船内部设置发出这样的光信号的装置。作为以与家用交流电源的频率不同的频率且以预定图案发光的光信号,例如,也可以为每隔预定时间交替反复第1频率(例如110Hz)的发光和第2频率(例如170Hz)的发光的光信号。作为第1频率、第2频率,也可以为与家用交流电源的频率的整数倍(在频率是50Hz的情况下为100Hz、150Hz、200Hz等。在频率是60Hz的情况下为120Hz、180Hz、240Hz等)不同的频率。另外,作为第1频率、第2频率,也可以以如下方式选择:第1频率、第2频率是与家用交流电源的频率的整数倍不同的频率,并且第1频率与第2频率之和也与家用交流电源的频率的整数倍不同。一般,作为普遍存在于城市中的信号的频率,多使用与家用交流电源的频率相同或整数倍的频率。因此,若使预定信号与家用交流电源的频率相同、或者与家用交流电源的频率的整数倍相同、或者第1频率和第2频率之和与家用交流电源的频率的整数倍相同,则在图2例示的驻车时处理例程的步骤S100中有时会将普遍存在于城市中的信号识别为预定信号,从而误识别为车辆在车辆搬运船的内部行驶。通过使预定信号为上述频率,能够抑制这样的误识别。
在搭载有实施例的控制装置的汽车20中,在车辆搬运船的内部显示有预定图像Imref。然而,预定图像Imref显示于车辆行驶至车辆搬运船时能够利用车载照相机32拍摄图像的场所即可,例如,既可以显示于车辆搬运船的入口附近,也可以显示于车辆搬运船停泊的港口的入口。另外,在车辆按照某特定路线行驶至车辆搬运船的情况下,也可以显示于该特定路线的建筑物、道路上的车载照相机32能够拍摄图像的场所。
在搭载有实施例的控制装置的汽车20中,在图2例示的驻车时处理例程的步骤S120中,在第1条件至第3条件中的至少1个成立时,识别为周边环境是搬运过程中特有的预定环境。然而,也可以仅将第1条件至第3条件中的2个条件成立时、第1条件至第3条件这3个条件成立时,识别为周边环境是搬运过程中特有的预定环境。另外,也可以不使用这样的全部的3个条件,例如,也可以将仅第1条件成立时、仅第2条件成立时,识别为周边环境是搬运过程中特有的预定环境。
在搭载有实施例的控制装置的汽车20中,在图2例示的驻车时处理例程的步骤S120中,根据车辆振动Vib、基于间隙声纳44a~44d的检测值的车辆的四角到对象物(障碍物)的距离Lfl、Lfr、Lrl、Lrr以及来自收音麦克风46的声音信号Sm,判定是否识别出周边环境是在利用车辆搬运船的搬运过程中特有的预定环境。然而,也可以除了这些传感器的检测值以外还使用来自检测车辆相对路面、车辆搬运船的驻车面的倾斜的倾斜传感器的本车的倾斜、来自检测加速度的加速度传感器的本车的加速度;或者也可以代替这些传感器的检测值,而使用来自检测车辆相对路面、车辆搬运船的驻车面的倾斜度的倾斜传感器的本车的倾斜度、来自检测加速度的加速度传感器的本车的加速度。在该情况下,将本车的倾斜度是预定倾斜度以上作为第4条件,将本车的加速度是预定加速度作为第5条件即可。而且,在除了第1~第3条件以外还考虑第4、第5条件时,也可以在第1~第5条件中的至少1个成立时,判定为识别出周边环境是在利用车辆搬运船的搬运过程中特有的预定环境。
在搭载有实施例的控制装置的汽车20中,例示出将本发明应用于通过车辆搬运船搬运车辆的搬运方式的情况。然而,车辆的搬运方式不限定于利用车辆搬运船的例子,也可以应用于利用其他移动体、例如车辆搬运列车的例子。在该情况下,将预定图像Imref显示于车辆搬运列车的内部、车站等车载照相机32能够拍摄图像的场所即可。另外,在图2例示的驻车时处理例程的步骤S120中,根据输入的各种传感器的检测值,判定是否识别出周边环境是利用移动体进行搬运的搬运过程中特有的预定环境即可。例如,在移动体是车辆搬运列车的情况下,在步骤S120中,也可以将第1条件设为车辆振动Vib是搭载于在轨道上行驶的车辆搬运列车的车辆特有的振动(例如,由于轨道的接缝而以一定周期发生的振动),将第3条件设为来自收音麦克风46的声音信号Sm是表示搭载于在轨道上行驶的车辆搬运列车的车辆特有的声音(例如,由于轨道的接缝而以一定周期发生的声音)的信号。另外,不限定于应用于这样的搬运时的例子,也可以应用于在与通常的车辆的使用状况不同的特殊的状况下放置车辆的状况。
在搭载有实施例的控制装置的汽车20中,将继电器25安装于导航装置26的电线28。然而,也可以安装于来自在搬运过程中的驻车时不需要供给电力且在并非搬运过程中的驻车时需要供给电力的其他电气安装件的电线(电气路径)。作为其他电气安装件,例如,可以例举出行车记录仪、仪表、时钟、调整方向盘(驾驶盘)的角度的倾斜机构、调整方向盘(驾驶盘)的前后位置的可伸缩机构、滑动车顶机构、储存与用户对应的座椅位置的座椅存储器、多媒体系统电子控制单元(多媒体系统ECU)、控制通信的通信系电子控制单元(通信系ECU)等在搬运过程中不供给电力也没关系的各种电子控制单元(ECU)、以及将本车辆的信息发送给交通信息管理中心或者从交通信息管理中心接收道路交通信息的DCM(DataCommunication Module,数据通讯模块)、为了对智能手机等无线设备进行充电而设置于车内的无线充电器等。另外,也可以预先确定至少1个在与通常的车辆的使用状况不同的特殊的状况下不供给电力的对象电气安装件,将继电器安装到连接于该对象电气安装件与蓄电装置之间的电线(对象电气路径)。
在搭载有实施例的控制装置的汽车20中,作为蓄电装置使用了由锂离子二次电池构成的蓄电池22。然而,也可以使用与锂离子二次电池不同的二次电池例如铅蓄电池等作为构成蓄电池22的二次电池。另外,也可以代替蓄电池22而使用电容器。
说明实施例的主要要素和记载在发明内容部分的发明的主要要素的对应关系。在实施例中,外部信号识别装置30能够视为“外部信号识别装置”,电源ECU40能够视为“外部环境识别装置”,继电器25能够视为“继电器”,电源ECU40能够视为“控制装置”。
此外,关于实施例的主要要素和记载在发明内容部分的发明的主要要素的对应关系,由于实施例是用于具体说明记载在发明内容部分的具体实施方式的一个例子,所以并不限定记载在发明内容部分的发明的要素。即,关于记载在发明内容部分的发明的解释应根据该栏的记载进行,实施例只不过是记载在发明内容部分的发明的一个具体的例子。
以上,使用实施例说明了用于实施本发明的方式,但本发明不限定于这样的实施例,当然能够在不脱离本发明的要旨的范围内,以各种方式实施。
本发明能够利用于控制装置的制造工业等。
- 控制装置、控制装置的控制程序、控制装置的控制方法、控制系统、终端装置、以及被控制装置
- 机动车辆的控制装置组合的运行控制装置和用于运行控制装置的方法