夹合器械
文献发布时间:2023-06-19 11:39:06
技术领域
本申请实施例涉及医疗器械技术领域,尤其涉及一种夹合器械。
背景技术
心脏瓣膜(二尖瓣、三尖瓣)返流属于常见的心脏疾病,以三尖瓣为例,其位于右房室口,常见发病为三尖瓣关闭不全,即收缩期血流从右心室返流入右心房,造成右心房高度扩大,压力升高,静脉血液回流障碍。由于右心室负荷增加,代偿而肥厚,容易发生右心衰竭。
三尖瓣返流一般由肺动脉高压,右室扩大,三尖瓣瓣环扩张引起,临床上常以三尖瓣返流的病因(左心衰,肺动脉高压等)的表现为常见,出现三尖瓣返流后,乏力,腹水,水肿,肝区疼痛,消化不良,纳差等右心衰症状加重。三尖瓣轻度返流并无明显的临床症状,但当严重返流时即需要手术治疗。
传统治疗手段包括药物治疗,和有相对应手术指征的外科手术方法。其中,外科手术方法还包括瓣膜置换术和瓣膜修补术。
近年来,随着科技的发展,国内外器械厂家研制出一批用于治疗二尖瓣或三尖瓣返流的介入式夹持器械。以二尖瓣返流治疗为例,所述夹持器械可经导管股静脉穿刺通过房间隔穿刺,并从左心房往下输送至二尖瓣附近,以针对二尖瓣的前后瓣叶的游离边缘进行夹持固定,通过夹持器械将二尖瓣夹成双孔,可使前后瓣叶在收缩末期对合良好,减少返流的现象。
目前二尖瓣的缘对缘修复技术大都存在着捕获瓣叶难度较大的问题,夹持器械的夹合部件只能同时捕获两侧瓣叶,对于严重二尖瓣返流的患者来说,瓣膜闭合不全会导致手术时间较长,同时捕获瓣叶难度较大。
如何解决目前瓣叶捕获难度大,捕获失败率高的问题,即为本申请需解决的技术问题。
发明内容
鉴于上述问题,本申请提供一种夹合器械,以克服上述问题或者至少部分地解决上述问题。
本申请实施例提供一种夹合器械,其包括:基座,其可定位于目标中心位置;以及至少两个夹合结构,各所述夹合结构可设于所述基座上并朝不同方向延伸,并可相对于所述基座在夹合状态和释放状态之间切换,以通过夹合邻接所述目标中心位置的不同目标组织,而调节各所述目标组织之间的间隔距离。
可选地,所述夹合器械包括分设于所述基座的相对两侧的两个夹合结构,用于分别夹合包括二尖瓣前瓣和二尖瓣后瓣。
可选地,所述夹合器械包括围设于所述基座上的两个所述夹合结构,用于分别夹合三尖瓣的任意两片瓣膜;或者所述夹合器械包括围设于所述基座上的三个所述夹合结构,用于分别夹合三尖瓣的各个瓣膜。
可选地,各所述夹合结构可同步地在所述夹合状态和所述释放状态之间切换;或者各所述夹合结构可独立地在所述夹合状态和所述释放状态之间切换。
可选地,呈所述夹合状态的各所述夹合结构相对于所述基座的定位角度可为相同或者不同。
可选地,所述夹合结构包括内夹臂和外夹臂;其中,所述内夹臂和所述外夹臂各自包括枢接所述基座的固定端,所述内夹臂和所述外夹臂可分别借由所述固定端相对于所述基座枢转,以供所述夹合结构在夹合状态以及释放状态之间切换。
可选地,所述内夹臂包括内臂夹持部,所述外夹臂包括外臂夹持部,所述外臂夹持部与所述内臂夹持部协同配合以夹持或释放所述目标组织。
可选地,所述内夹臂还包括设于所述内臂夹持部上的内臂防脱部;和/或所述外夹臂还包括设于所述外臂夹持部上的外臂防脱部;其中,当所述夹合结构处于夹合状态时,所述内臂防脱部和/或所述外臂防脱部用于防止所述目标组织从所述外臂夹持部与所述内臂夹持部之间脱落。
可选地,所述内臂防脱部包括设于所述内臂夹持部上并朝所述外臂夹持部的方向延伸的多个倒刺,所述外臂防脱部包括形成于所述外臂夹持部上的多个防脱槽。
可选地,所述内臂夹持部包括弹性带,所述外臂夹持部包括弧形叶片。
可选地,所述内夹臂还包括相对于所述固定端的自由端,所述自由端可受力而驱动所述内夹臂的固定端相对于所述基座枢转,以调节所述内夹臂相对于所述基座的枢转角度。
可选地,所述夹合结构还包括致动杆和联动杆;其中,所述致动杆可活动地穿设于所述基座上,所述联动杆的相对两侧分别枢接所述外夹臂和所述致动杆;且其中,所述致动杆可沿其轴向相对于所述基座移动,以经由所述联动杆驱动所述外夹臂相对于所述基座枢转,进而调节所述外夹臂相对于所述基座的枢转角度。
可选地,所述夹合器械包括两个所述夹合结构对应的两个所述致动杆;其中,两个所述致动杆包括穿设于所述基座中且相互套设的外杆和内杆;其中,所述两个联动杆分别枢接所述外杆的外杆底部和所述内杆的内杆底部,且所述内杆底部位于所述外杆底部与所述基座之间,所述外杆底部与所述基座之间的间隔距离可限定所述内杆底部相对于所述基座的最大移动区间。
可选地,所述夹合器械包括两个所述夹合结构对应的两个所述致动杆,所述两个致动杆分别穿设于所述基座中,并可独立地相对于基座滑移。
可选地,所述夹合结构还包括设于所述基座上的锁定结构;其中,所述锁定结构可相对于所述基座在锁定位置和非锁定位置之间切换,以限制或允许所述致动杆相对于所述基座移动。
综上所述,本申请实施例提供的夹合器械通过令围设于基座上的各夹合结构独立执行目标组织的夹合捕获操作,可以提高目标组织的捕获概率,降低捕获难度。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请实施例中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
图1至图2为本申请的夹合器械的不同结构侧视图。
图3至图4为本申请夹合器械的致动杆的一实施例结构示意图。
图5为本申请夹合器械的致动杆的另一实施例结构示意图。
图6为本申请夹合器械的锁定结构的结构示意图。
元件标号
1:夹合器械;
2:基座;
3:夹合结构;
4:内夹臂;
402:固定端;
404:内臂夹持部;
406:内臂防脱部;
408:倒刺;
410:弹性带;
412:自由端;
5:外夹臂;
502:固定端;
504:外臂夹持部;
506:外臂防脱部;
508:防脱槽;
510:弧形叶片;
512:致动杆;
514:联动杆;
516:外杆;
518:内杆;
520:外杆底部;
522:内杆底部;
6:锁定结构。
具体实施方式
为了使本领域的人员更好地理解本申请实施例中的技术方案,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本申请实施例一部分实施例,而不是全部的实施例。基于本申请实施例中的实施例,本领域普通技术人员所获得的所有其他实施例,都应当属于本申请实施例保护的范围。
目前用于治疗二尖瓣闭合不全的夹持器械由于只能捕获两侧瓣叶,导致捕获瓣叶难度较大、手术时间较长的问题。有鉴于此,本申请实施例提供一种夹合装置,可独立执行各瓣叶的夹持操作,以改善上述技术问题。
下面将结合本申请实施例附图进一步说明本申请实施例具体实现。
本实施例的夹合器械1可作为结构性心脏病介入治疗领域的缘对缘修复植入体,其能够通过经血管微创入路或者经心耳到达指定解剖位置,实现心脏叶瓣的修复治疗。
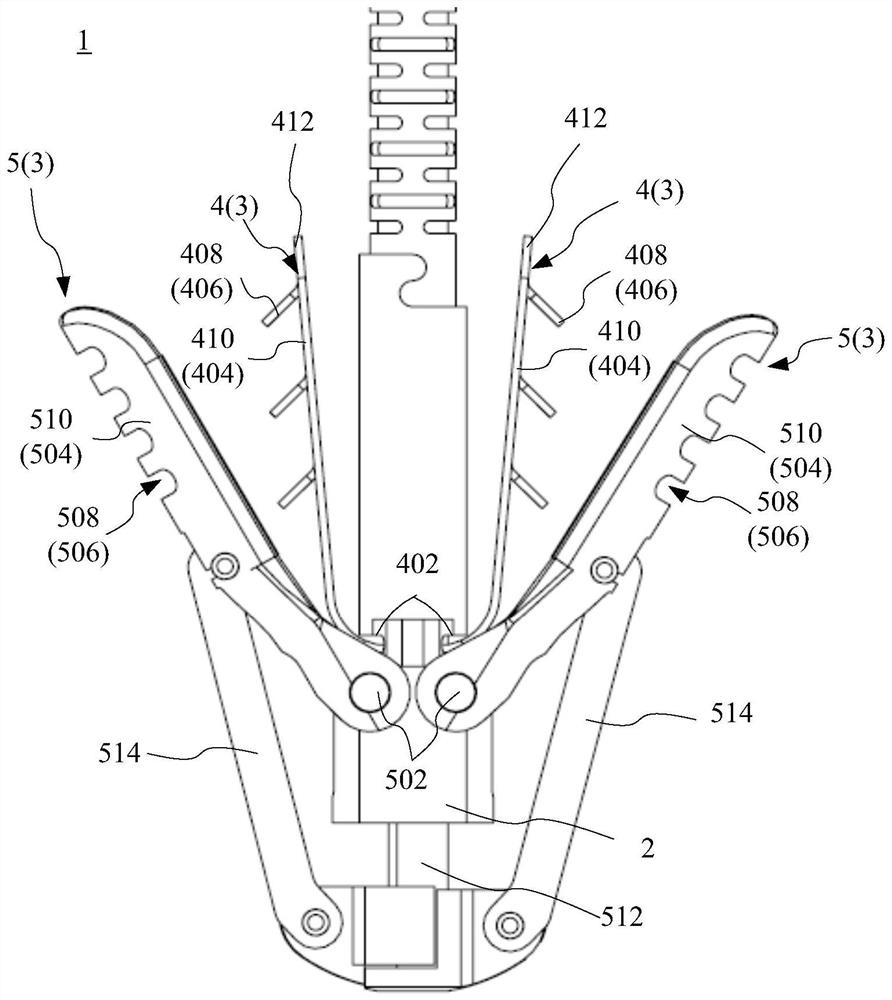
如图1和图2所示,本申请的夹合器械1主要包括基座2和至少两个夹合结构3。
于本实施例中,基座2可定位于目标中心位置,各夹合结构3可围设在基座2上,并可相对于基座2在夹合状态和释放状态之间切换,以通过夹合或释放邻接目标中心位置的各目标组织,而调节各目标组织之间的间隔距离。
可选地,夹合器械1可包括分设于基座2的相对两侧的两个夹合结构3,目标组织可包括二尖瓣前瓣和二尖瓣后瓣,可借由夹合器械1的两个夹合结构3分别夹合二尖瓣前瓣和二尖瓣后瓣,以治疗二尖瓣闭合不全的问题。
可选地,夹合器械1也可用于三尖瓣返流的治疗。
于一实施例中,夹合器械1可包括围设于基座2上的两个夹合结构3,可用于分别夹合三尖瓣的任意两片瓣膜。
于另一实施例中,夹合器械1也可包括围设于基座2上的三个夹合结构3,以分别夹合三尖瓣的各个瓣膜。
可选地,各夹合结构3可同步地在所述夹合状态和所述释放状态之间切换,亦或者,各夹合结构3可独立地在所述夹合状态和所述释放状态之间切换。
于本实施例中,呈夹合状态的各夹合结构3相对于基座2的定位角度可为相同或者不同。
于本实施例中,夹合结构3可包括内夹臂4和外夹臂5。
具体地,内夹臂4和外夹臂5各自包括枢接基座2的固定端402,502,内夹臂4和外夹臂5可分别借由固定端402,502相对于基座2枢转,从而提供夹合结构3在夹合状态和释放状态之间切换。
于本实施例中,内夹臂4可包括内臂夹持部404,对应的,外夹臂5可包括外臂夹持部504,其中,外臂夹持部504与内臂夹持部404可协同配合以夹持或释放目标组织。
可选地,内臂夹持部404可包括弹性带410。外臂夹持部504可包括弧形叶片510。
可选地,内夹臂4还可包括设于内臂夹持部404上的内臂防脱部406。
可选地,外夹臂5还可包括设于外臂夹持部504上的外臂防脱部506。
当夹合结构3处于夹合状态时,内臂防脱部406和/或外臂防脱部506可用于防止目标组织从外臂夹持部504与内臂夹持部404之间脱落,以确保目标组织被牢固地夹持在外臂夹持部504与内臂夹持部404之间。
可选地,内臂防脱部406可包括设于内臂夹持部404上并朝外臂夹持部504的方向延伸的多个倒刺408。
可选地,外臂防脱部506包括形成于外臂夹持部504上的多个防脱槽508。
于本实施例中,内夹臂4还包括相对于固定端402的自由端412。
其中,内夹臂4的自由端412可受力而驱动内夹臂4的固定端402相对于基座2枢转,以调节内夹臂4相对于基座2的枢转角度。
例如,通过将内夹臂4的自由端414与控制丝(未示出)连接,以借由控制丝针对内夹臂4的自由端412施加作用力而驱动内夹臂4相对于基座2枢转,以实现独立控制内夹臂4相对于基座2的开合角度的目的。
于本实施例中,夹合结构3还包括致动杆512和联动杆514。
其中,致动杆512可活动地穿设于基座2上,联动杆514的相对两侧分别枢接外夹臂5和致动杆512。
于本实施例中,致动杆512可沿其轴向相对于基座2移动,以经由联动杆514驱动外夹臂5相对于基座2枢转,进而调节外夹臂5相对于基座2的枢转角度,以实现独立控制外夹臂5相对于基座2的开合角度的目的。
请参考图3和图4,于一实施例中,在夹合器械1包括有两个夹合结构3的情况下,对应于两个夹合结构3的两个致动杆512可包括穿设于基座2中且相互套设的外杆516和内杆518。
具体地,两个联动杆514分别枢接外杆516的外杆底部520和内杆518的内杆底部522,且内杆底部522位于外杆底部520与基座2之间(亦即,内杆底部522相较于外杆底部520更接近基座2),以借由外杆底部520与基座2之间的间隔距离限定内杆底部522相对于基座2的最大移动区间。
请参考图5,于另一实施例中,在夹合器械1包括有两个夹合结构3的情况下,对应于两个夹合结构3的两个致动杆可分别穿设于基座2中,例如,两个致动杆可并排穿设于基座2中,从而独立地相对于基座2进行滑移。
可选地,夹合结构3还可包括设于基座2上的锁定结构6(参考图6),其中,锁定结构6可相对于基座2在锁定位置(例如,图6中虚线位置的锁定结构6)和非锁定位置(例如,图6中实线位置的锁定结构6)之间切换,以限制或允许致动杆512相对于基座2移动。
综上所述,本申请的夹合器械可独立控制各夹合结构执行目标组织的夹合操作,可以有效提高目标组织的捕获概率并降低目标组织的捕获难度。
最后应说明的是:以上实施例仅用以说明本申请实施例的技术方案,而非对其限制;尽管参照前述实施例对本申请进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本申请各实施例技术方案的精神和范围。
- 夹合器械
- 夹合器械