生物体的姿态感测方法
文献发布时间:2023-06-19 11:44:10
技术领域
本发明是关于一种感测方法,特别是关于一种生物体的姿态感测方法。
背景技术
此处的陈述仅提供与本发明有关的背景信息,而不必然地构成现有技术。
长期照护逐渐地受到重视,对于生物体的生理征象的侦测正快速地发展中,以即时地侦测生物体的生理征象,而达成生物体的健康监控。其中,以雷达进行生理征象的监测相较于影像撷取装置有着侦测精准、不受到障碍物影响,且让受测者具有较大的隐私的优势。生理征象侦测雷达大致上可区分为连续波雷达及非连续波雷达,其中,连续波雷达包含直接转频连续波雷达、自我注入锁定雷达及频率调变连续波雷达…等,目前连续波雷达对于生物体仅能对生物体的细微振动,如呼吸、心跳进行侦测,而无法用于侦测生物体较大位移的姿态、动作进行感测,导致有些可能会危及生物体的生命的姿态无法被即时发现,例如进房跌倒后无法移动但仍有呼吸心跳的情况,或是行动不方便的患者躺在非床上位置的情况,都可能成为一般仅能侦测生物体的呼吸、心跳的雷达的盲点。
发明内容
本发明的主要目的在于提供一种生物体的姿态感测方法,其借由计算各个侦测距离的动量强度,并借由多个侦测距离的动量强度计算特征距离的动量特征时域函数,而可以特征距离的动量特征时域函数判断生物体的姿态。
本发明的一种生物体的姿态感测方法包含:(a)频率调变连续波雷达发射无线信号至一区域,且该频率调变连续波雷达接收该区域反射的反射信号为侦测信号;(b)处理器接收该侦测信号,该侦测信号具有多个时间区段,该处理器将该侦测信号的时间区段分割为多个短时侦测信号;(c)该处理器对各该短时侦测信号进行频谱分析,并将各该短时侦测信号的相同频率的成份重组为多个子侦测信号,其中各该子侦测信号对应侦测距离;(d)该处理器根据各该子侦测信号的振幅计算各该子侦测信号对应的各该侦测距离的动量强度;(e)该处理器反复进行步骤(b)至(d),以计算该侦测信号的该些时间区段的该侦测距离的该动量强度;以及(f)该处理器将多个该侦测距离定义为特征距离,且该处理器根据该特征距离的多个该动量强度计算该特征距离的动量特征值,并将不同的该时间区段的该动量特征值组合为该特征距离的动量特征时域函数;以及(g)该处理器根据该特征距离的该动量特征时域函数判断位于该区域中的生物体的姿态。
本发明的目的还可以采用以下技术措施进一步实现。
前述的生物体的姿态感测方法,其中于步骤(f)中,该处理器定义多个该特征距离,各该特征距离分别对应多个该侦测距离,且该处理器计算各该特征距离的该动量特征时域函数,于步骤(g)中,该处理器根据多个该特征距离的该动量特征时域函数判断位于该区域中的该生物体的该姿态。
前述的生物体的姿态感测方法,其中,其包含步骤(h),该处理器根据该生物体的该姿态判断该生物体是否发生异常的生理征象。
前述的生物体的姿态感测方法,其中于步骤(f)中,该处理器是借由该生物体于该区域中不同位置的该姿态对应该频率调变连续波雷达的距离,将多个该侦测距离定义为该特征距离。
前述的生物体的姿态感测方法,其中,该处理器是将各该子侦测信号的该振幅的离散程度作为各该侦测距离的该动量强度。
前述的生物体的姿态感测方法,其中,该处理器是计算各该子侦测信号的该振幅的标准差,并将该标准差作为各该侦测距离的该动量强度。
前述的生物体的姿态感测方法,其中,该处理器是计算该特征距离对应的多个该侦测距离的该动量强度的平均值,并将该平均值作为该特征距离的该动量特征值。
前述的生物体的姿态感测方法,其中,各该子侦测信号对应的该侦测距离的计算方法为:
其中,R为各该子侦测信号对应的该侦测距离,c
前述的生物体的姿态感测方法,其中,该处理器具有中央处理单元及储存单元,该储存单元电性连接该频率调变连续波雷达以接收该侦测信号,该储存单元用以储存该侦测信号,该中央处理单元电性连接该储存单元以接收该侦测信号,该中央处理单元用以对该侦测信号进行运算。
前述的生物体的姿态感测方法,其中,该频率调变连续波雷达具有FM信号产生器、功率分配器、发射天线、接收天线及混频器,该FM信号产生器用以输出频率调变信号,该功率分配器电性连接该FM信号产生器,该功率分配器将该频率调变信号分为两路,该发射天线电性连接该功率分配器以接收其中一路的该频率调变信号,该发射天线将该频率调变信号发射为该无线信号,该接收天线接收该反射信号为接收信号,该混频器电性连接该功率分配器及该接收天线,以接收另一路的该频率调变信号及该接收信号,且该混频器将该频率调变信号及该接收信号进行混频而输出该侦测信号。
本发明借由该频率调变连续波雷达对该区域进行侦测,可得到各个该侦测距离的该动量强度,进而计算多个侦测距离构成的该特征距离的该动量特征时域函数,以根据该特征距离的该动量特征时域函数判断生物体的姿态,达成不受障碍物干扰且具高隐私的姿态感测。
上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合图式,详细说明如下。
附图说明
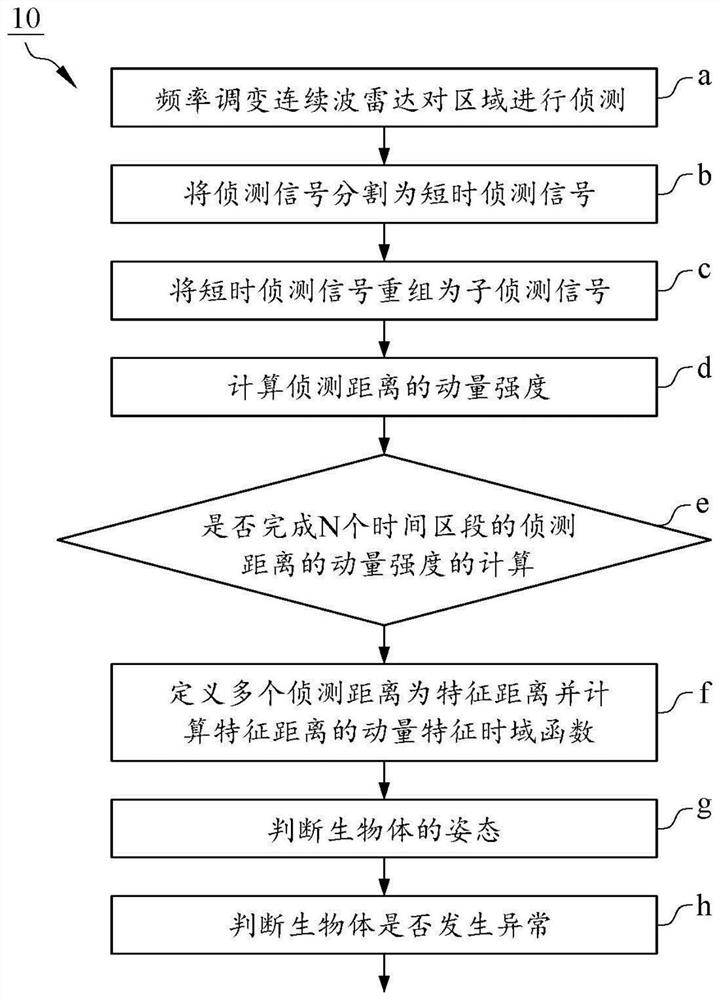
图1:依据本发明的一实施例,一种生物体的姿态感测方法的流程图。
图2:依据本发明的一实施例,频率调变连续波雷达及处理器的方块图。
图3:依据本发明的一实施例,该频率调变连续波雷达的电路图。
图4:依据本发明的一实施例,该处理器进行步骤(b)-(d)的示意图。
图5:依据本发明的一实施例,该处理器进行步骤(f)的示意图。
图6:依据本发明的一实施例,人体于区域中进行动作的示意图。
图7:依据本发明的一实施例,人体于区域中进行动作的示意图。
【符号说明】
10:生物体的姿态感测方法
a:频率调变连续波雷达对区域进行侦测
b:将侦测信号分割为短时侦测信号
c:将短时侦测信号重组为子侦测信号
d:计算侦测距离的动量强度
e:是否完成N个时间区段的侦测距离的动量强度的计算
f:定义多个侦测距离为特征距离并计算特征距离的动量特征时域函数
g:判断生物体的姿态 h:判断生物体是否发生异常
100:频率调变连续波雷达 110:FM信号产生器
120:功率分配器 130:发射天线
140:接收天线 150:混频器
200:处理器 210:中央处理单元
220:储存单元 S
R:区域 S
S
S
S
SD
D
SD
T
具体实施方式
为更进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合图式及较佳实施例,对依据本发明提出的生物体的姿态感测方法,其具体实施方式、结构、方法、步骤、特征及其功效,详细说明如后。
请参阅图1,为本发明的一实施例,一种生物体的姿态侦测方法10的流程图,其包含:(a)频率调变连续波雷达对区域进行侦测、(b)将侦测信号分割为短时侦测信号、(c)将短时侦测信号重组为子侦测信号、(d)计算侦测距离的动量强度、(e)是否完成N个时间区段的侦测距离的动量强度的计算、(f)定义多个侦测距离为特征距离并计算特征距离的动量特征时域函数、(g)判断生物体的姿态及(h)判断生物体是否发生异常。
请参阅图1及图2,于步骤(a)中,一频率调变连续波雷达100发射一无线信号S
由于该频率调变连续波雷达100是发射频率随时间改变的该无线信号S
请参阅图2,一处理器200接收该侦测信号S
请参阅图1、图2及图4,于步骤(b)中,该处理器200接收该侦测信号S
请参阅图1、图2及图4,于步骤(c)中,该处理器200对各该短时侦测信号S
较佳的,在本实施例中,各该子侦测信号S
其中,R为各该子侦测信号S
请参阅图1、图2及图4,于步骤(d)中,该处理器200根据各该子侦测信号S
请参阅图1、图2及图4,于步骤(e)中,该处理器200判断是否已完成N个时间区段T
请参阅图1、图2及图5,由于生物体在该区域R中的姿态可能会同时影响多个该侦测距离的该动量强度,且两种不同的姿态可能在单一个该侦测距离中有着相同的动量强度,使得仅以单一个该侦测距离的动量强度并无法明确地判断生物体的姿态。因此,于步骤(f)中,该处理器200将多个该侦测距离定义为一特征距离D
请参阅图5,本实施例将介于最小该侦测距离D
在本实施例中,由于该生物体的姿态为连续动作,一个姿态会同时涵盖多个该侦测距离,因此,该处理器200借由该生物体于该区域R中不同位置的该姿态对应该频率调变连续波雷达100的一距离,将多个该侦测距离定义为该特征距离D
请参阅图7,以人体由床尾走向床边的动作为例,其中,A为该频率调变连续波雷达100至地面的距离、C为床的长度、E为人体的身高、D为床的宽度,相同地,该处理器200即可借由该些参数及简单的三角函数计算出人体人体由床尾走向床边的动作会影响的最大该侦测距离D
请参阅图1及图2,于步骤(g)中,由于该特征距离D
由于以多个该特征距离D
在其他实施例中,该生物体的姿态侦测方法10亦能以多个该频率调变连续波雷达100或是具有多个该发射天线130的单一个该频率调变连续波雷达100发射多个无线信号S
本发明借由该频率调变连续波雷达100对该区域R进行侦测,可得到各个该侦测距离的该动量强度,进而计算多个侦测距离构成的该特征距离的该动量特征时域函数,以根据该特征距离的该动量特征时域函数判断生物体的姿态,达成不受障碍物干扰且具高隐私的姿态感测。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
- 生物体的姿态感测方法
- 用于对生物体的心音、循环效应和核心温度进行连续无线监测和分析的感测器系统及方法