一种非接触增量式编码器及其工作方法
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及位移测量工具、装置与器件,具体涉及一种非接触增量式编码器及其工作方法。
背景技术
传统测量位移的器件,通常有光栅尺、磁栅尺、旋转编码器等。
光栅尺、磁栅尺,由于需要有专用的读数头和测量尺匹配,安装位置要求较为严格,无法对流水线上更替的物体进行测量。
旋转编码器,连接输入端为机械结构,首先要解决的就是安装和动力连接的问题。
工业用旋转编码器外形通常比较大,无法满足超薄或者狭小空间(厚度小于10mm)的安装要求。
旋转编码器的安装的方式通常是使用同步轮或者连轴器。滚轮接触传动使用时间长之后产生的磨损或打滑造成测量不可靠。连轴传动安装时容易产生的偏心、不共线,或挤压应力,长时间使用时轴承存在磨损而产生跳动甚至损坏。以至于导致测量精度降低,传感器逐渐不可靠。另外些场景中比如薄膜片、纸张或高平整度的表面由于动力不足或者会对产品造成损害而不允许编码器直接接触时,传统的方案就需要间接地测量承载装置的运动来得到被测物体的位移情况,会引入误差。这些增量式编码器都是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。
发明内容
本发明需要解决的技术问题是,如何提供一种非接触增量式编码器及其工作方法,能非接触测量位移、输出脉冲。
本发明的上述第一个技术问题这样解决:构建一种非接触增量式编码器,其特征在于,包括:
高频图像采集单元,获取并输出高帧率的待测物高帧率图像数据;
方向限定单元,用于选择或者限定待测物移动方向作为单一检测方向;
图像处理模块,输入电连接所述高频图像采集单元和方向限定单元,根据所述高帧率图像数据计算并输出单一检测方向上的对应正负位移量;
脉冲输出模块,输入电连接所述图像处理模块的输出端,根据所述位移量的大小对外输出符合编码器规范的对应AB相脉冲信号。
按照本发明提供的非接触增量式编码器,还包括与所述脉冲输出模块连接的用于控制脉冲输出时间的第一定时器与用于控制脉冲输出数量的第二定时器。
按照本发明提供的非接触增量式编码器,所述脉冲输出模块还包括用于分频输出的分频单元及与其电连接的分频设置单元。
按照本发明提供的非接触增量式编码器,所述高频图像采集单元包括内置在光电鼠标传感器单元的红外发光管和图像传感器。
按照本发明提供的非接触增量式编码器,图像处理模块包括内置在光电鼠标传感器单元的获取待测物移动变化位置数据的传感器芯片及其电连接的用于根据所述位置数据计算单一检测方向上正负位移量并折算成对应脉冲数量的计算编制单元。
按照本发明提供的非接触增量式编码器,所述计算编制单元、方向限定单元、定时器和脉冲输出模块内置在微处理器中。
按照本发明提供的非接触增量式编码器,所述图像处理模块包括传感器的定位精度(DPI)设置单元;所述非接触增量式编码器还包括与各设置单元外部连接的上位机,或者与脉冲输出模块连接的电子测距表、相机或视频采集卡。
按照本发明提供的非接触增量式编码器,所述图像处理模块高频图像采集单元采用高精度光学追踪传感器。
按照本发明提供的非接触增量式编码器,还包括开光测量窗口的外壳及其固定支架。
本发明的上述另一个技术问题这样解决:构建一种非接触增量式编码器工作方法,其特征在于,包括以下步骤:
高帧率采集获取待测物的移动变化图像;
对所述图像进行图像处理获得待测物在单一方向上的移动大小和方向正负;
将移动大小折算成脉冲数量;
根据移动方向正负和所述脉冲数量输出对应AB相脉冲信号。
本发明提供的非接触增量式编码器及其工作方法,采用图像技术、无需与产品产生同步的运动动作,与现有技术相比,至少包括以下优势:
1、没有接触和动力要求。不接触产品本身、无须外部驱动,避免某些被测物体在运动过程中动力不足无法向外输出的情况;
2、安装简易、需求空间小。直接固定在被测物体高度合适的上方即可稳定工作。不需要找到可靠不打滑的表面安装橡胶摩擦轮,或找到机械旋转轴使用联轴器同轴安装;
3、相对传统同类编码器,本编码器可对输出的脉冲进行分频。
附图说明
下面结合附图和具体实施例进一步对本发明进行详细说明。
图1是本发明优选的非接触增量式编码器外部结构示意图;
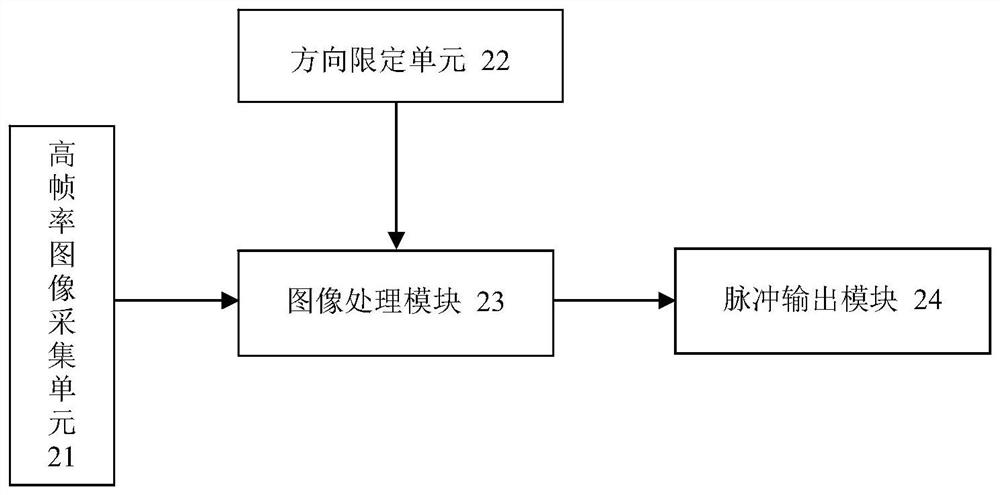
图2是图1所示编码器的电路结构框图;
图3是图1所示编码器的电路原理示意图;
图4是图3所示编码器的工作信号时序示意图;
图5是图3中微处理器的控制算法流程示意图。
其中,附图标记:11-外壳,12-固定支架,21-高帧率图像采集单元,22-方向限定单元,23-图像处理模块,24-脉冲输出模块,U1-微处理器,U2-传感器芯片,SS-片选信号,SCK-串行外设接口(SPI)时钟线,MOSI-主控输出,MISO-主控输入,Digital6和Digital7-AB相脉冲。
具体实施方式
结合本发明最优实施例进一步对本发明进行详细说明:
㈠产品
如图1所示,本发明最优实施的非接触增量式编码器包括一个长方体形状的铝制金属外壳11,内部设置电路板。外壳上设置有传感器测量窗口和脉冲信号输出端。金属外壳通过固定支架12构件,根据推荐的检测距离,遵测量窗口正对待测物、安装到其被测表面上方。
将该非接触增量式编码器在被测物移动时,编码器中的微处理器可以通过传感器获取物体相对移动的距离,再调制转换为响应频率与个数的AB相脉冲输出。具体包括但不限制于以下应用:
1、将本编码器输出的脉冲信号接入到电子测距表,可以以测试处被测物正向或反向的位移距离。
2、将本编码器输出的脉冲接入到线阵相机、面阵相机或视频采集卡,可以控制采集设备按照固定的位移间隔进行图像采集。
3、可通过与上位机的建立的通用异步收发传输器(UART)通讯,设置本编码器对输出的脉冲进行分频,传统编码器本身无法进行分频。
㈡电路结构
如图2所示,本发明非接触增量式编码器包括用于计算被测物位移的图像处理模块23及其电连接的高帧率图像采集单元21、方向限定单元22与输出AB相脉冲信号的脉冲输出模块24。
本发明最优实施的非接触增量式编码器,具体电路如图3所示,主要由鼠标光电传感器单元和微处理器U1组成,鼠标光电传感器单元包括传感器芯片U2及其控制电连接的红外发光头和图像传感器,图像传感器还配套辅助成像的光学透镜。微处理器U2和鼠标光电传感器单元分别集成在26mm*26mm的两片电路板(PCB)内,通过软排线中的4条信号连接线NCS、MISO、SCLK和MOSI连接,整体安装在铝制金属外壳内,再通过信号线Digital6、Digital7输出AB相脉冲。
㈢工作原理
鼠标光电传感器单元获取位置变化,再由微处理器U1定期实时地从鼠标光电传感器单元读取更新传感器的数据,解析获得位移大小,再编码成对应AB脉冲信号输出,具体工作流信号如图4所示,其中:SS、SCK、MOSI、MISO为传感器SPI通信总线的数据传输时序波形;SS是片选信号,SCK是SPI时钟线,MOSI是主控输出,MISO是主控输入;Digital6、Digital7为调制输出的AB相脉冲。该工作原理主要包括:
①获取固定轴偏移
由于待测物的移动方向是限定的,本实施例采用限定方向方式:
1)传感器的定位精度DPI固定设置为:
dpi=5000
2)从传感器上获取的数据包含X、Y两组正交坐标轴的位移变化量dx、dy。
3)数据进行平滑滤波操作。
4)根据数学勾股定理a2+b2=c2得出一个数据周期内的实际位移变化量d大小并由dx或dy的符号决定正负:
|d|=
在另一实施例中,采用方向选择方式:d=kdx或kdy。k是系数,当本发明编码器安装好后,k不变。这种方式还可进一步减少其他方向的误检测。
②调制脉冲
微处理器内部对获取的数据建立一个缓存区记录当前获取的总变化量d。上位机通过串口通讯方式对微处理器设定一个脉冲的分频pdiv和倍频参数pmul;
最终输出的脉冲个数为:
p=INT(d×pmul+pdiv)
此时同时缓冲区中的变化量d相应地减去已经输出的部分。
在此发明的应用中,只需要使用固定轴的偏移,如果此偏移值为正值,表示沿此轴正方向存在位移动作,同理,偏移为负值表示动作方向为此轴负方向。在获取偏移量后对其执行相关数据处理流程。如果偏移值为零,表示在之前时间段中被测物体没有移动,则不需要转换脉冲发出。如果偏移值非零,则将偏移量转换为对应数量的脉冲数。例如,此时从传感器中读出偏移值为+10,传感器回报率为1000,则每次回报周期为1ms,便调制10个周期为1ms/10=100us的脉冲发出。
脉冲的调制输出使用微处理器U1的双定时器配合控制的方式。第一定时器工作在比较翻转模式,负责控制输出一个脉冲的上升沿和下降沿。第二定时器工作在从模式,负责控制输出脉冲个数,即定时器2对第一定时器的溢出次数进行计数。
每当有新的一次不为0的偏移值产生时。先将本次输出的脉冲个数对应设置到第二定时器的计数值。然后以更新周期1ms为总时间,计算并设定第一定时器翻转的计数值和溢出计数值。参数设置好后。同时开启两个定时器,即可通过定时器本身的硬件配置,控制脉冲输出引脚的翻转。
最终每个输出脉冲代表的实际距离dp为:
dp=dpi÷25.4÷pmul×pdiv
另外,微处理器U1初始化后。除了定时从传感器单元读取更新传感器的数据外,同时也接收从上位机发过来的控制命令数据。接收到新的命令时,将对其进行解析处理,完成设置传感器DPI、修改脉冲输出的分频数等。
㈣软件控制算法
系统初始化完成后,微处理器U1运行控制程序,按照1ms的数据更新周期,实时读取鼠标光电传感器的位置变化。在每个采样周期相对于前一个采样周期状态的偏移量为被测物体在采样周期的微小时间片中的移动情况,若该采样周期内的位移不为0,则按变化数值的大小,调制输出相应个数的AB相脉冲。该内置控制程序,具体如图5所示,包括以下步骤:
501)开始;
502)获取新的一次偏移;
503)判断偏移是否大于零?是下一步,否则返回步骤502);
504)脉冲数据滤波降噪处理;
505)判断偏移是否大于零?是下一步,否则返回步骤502);
506)判断是否分频及上一周期是否有剩余脉冲?是下一步,否则进入步骤508);
507)计算分频后的本周期输出脉冲;
508)调制输出本周期输出脉冲,返回步骤502)。
另外开始通电,系统初始化,微处理器U1开始运行。首先对自身外设器件、如UART、串行外设接口(SPI)总线、定时器等进行初始化操作,建立与上位机的通讯窗口,准备与传感器的通讯通道等。然后连接鼠标光电传感器,对其进行初始化操作,设置传感器的定位精度(DPI)等。
以上所述仅为本发明的较佳实施例,凡依本发明权利要求范围所做的均等变化与修饰,皆应属本发明权利要求的涵盖范围。
- 一种非接触增量式编码器及其工作方法
- 一种非接触交互式电子沙盘及工作方法