地面多目标点成像快速判定及任务参数计算方法
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及遥感卫星成像任务参数计算技术领域,具体涉及地面多目标点成像快速判定及任务参数计算方法。
背景技术
随着低轨遥感卫星的数量不断增加,对于卫星星座的运营压力也在不断增加,许多原本在地面进行的工作,需要逐渐以星上自主完成的形式进行,卫星成像任务规划即是其中重要的一项。卫星成像任务规划即是按照提前规划好的参数进行姿态机动,以对选择好的目标点进行成像,是一项比较复杂的工作,需要综合考虑卫星的拍摄能力、光照、遮挡、目标优先级等等因素。当需要成像的目标点过多,且同时管理的卫星数目过多时,任务量是巨大的。为此实现星上自主任务规划可以大大降低人力压力,同时能保证任务执行的流畅性。
传统成像点任务能力判定及参数计算一般通过轨道积分的方法实现,对于单个或几个目标点的计算,该方法适用;而对于几百或者几千个目标点,对于星载计算机来说,占用计算资源过大,短时间内无法完成计算。为了实现星上自主计算,需要改变计算方法,不能采用针对单个目标点逐一轨道递推计算搜索的方法,而是需要一种能兼顾多个目标点的高效算法。
发明内容
为了解决上述问题,本发明提供地面多目标点成像快速判定及任务参数计算方法。
本发明为解决技术问题所采用的技术方案如下:
地面多目标点成像快速判定及任务参数计算方法,包括如下步骤:
步骤一、在卫星星下点地面轨迹公式中输入卫星轨道参数,得到卫星星下点轨迹解析表达式;
步骤二、计算最大侧摆的像点坐标表达式;
步骤三、根据卫星星下点轨迹解析表达式和最大侧摆的像点坐标表达式,判断需要成像目标点中落在可成像区域范围内的可成像目标点;
步骤四、采用单纯形搜索方法搜索可成像目标点在卫星星下点轨迹上成像点范围;根据成像点范围,采用二分法搜索可成像目标点在卫星星下点轨迹上的成像点;根据可成像目标点在卫星星下点轨迹上的成像点的经纬度,计算该成像点的成像时刻,根据可成像目标点的经纬度和该可成像目标点在卫星星下点轨迹上的成像点的经纬度,计算卫星对该可成像目标点成像时的侧摆角。
本发明的有益效果是:
本发明地面多目标点成像快速判定及任务参数计算方法能够兼顾多个目标点,适用于对于星载计算机,能够快速判定成像点及计算任务参数,能够短时间内完成判断计算,计算结果准确高效,能够保证实际任务需求。本发明的星上成像点判定及任务参数计算,实现了在保证精度要求的条件下,也保证了计算效率。
附图说明
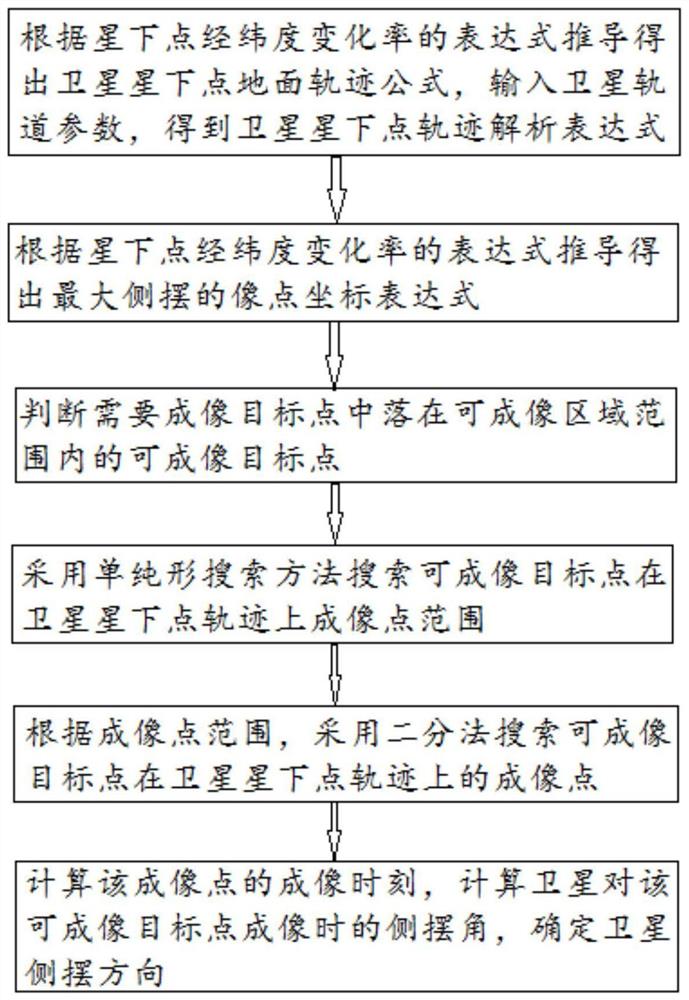
图1为本发明的地面多目标点成像快速判定及任务参数计算方法的流程图。
图2为本发明的地面多目标点成像快速判定及任务参数计算方法的步骤一得到的卫星星下点轨迹示意图。
图3为本发明的地面多目标点成像快速判定及任务参数计算方法的步骤二得到的卫星可成像范围图。
图4为本发明的地面多目标点成像快速判定及任务参数计算方法的步骤三的可成像目标点判定方法示意图。
图5为本发明的地面多目标点成像快速判定及任务参数计算方法的轨迹上成像点搜索方法示意图。
图6为本发明的地面多目标点成像快速判定及任务参数计算方法的需要侧摆的侧摆角近似计算方法示意图。
图7为本发明的地面多目标点成像快速判定及任务参数计算方法的侧摆方向计算方法示意图。
图8为本发明的地面多目标点成像快速判定及任务参数计算方法的目标点分布图。
图9为本发明的地面多目标点成像快速判定及任务参数计算方法的图8的目标点判定结果。
图10为本发明的地面多目标点成像快速判定及任务参数计算方法的以1个目标点为例的目标点成像参数计算效果图。
图11为本发明的地面多目标点成像快速判定及任务参数计算方法在实际应用中的目标点判定图。
具体实施方式
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
地面多目标点成像快速判定及任务参数计算方法,如图1所示,包括如下步骤:
步骤一、在卫星星下点地面轨迹公式中输入卫星轨道参数,得到卫星星下点轨迹解析表达式;
步骤二、计算最大侧摆的像点坐标表达式;
步骤二、计算星下点轨迹对应的最大侧摆的像点坐标表达式,即计算卫星星下点轨迹解析表达式对应的最大侧摆的像点坐标表达式。
步骤三、根据步骤一得到的卫星星下点轨迹解析表达式和步骤二得到的最大侧摆的像点坐标表达式,判断需要成像的目标点中落在可成像区域范围内的可成像的目标点。
步骤四、采用单纯形搜索方法搜索可成像目标点在卫星星下点轨迹上成像点范围;根据成像点范围,采用二分法搜索可成像目标点在卫星星下点轨迹上的成像点;根据可成像目标点在卫星星下点轨迹上的成像点的经纬度,计算该成像点的成像时刻,根据可成像目标点的经纬度和该可成像目标点在卫星星下点轨迹上的成像点的经纬度,计算卫星对该可成像目标点成像时的侧摆角。
下面对各个步骤进行具体祥述。
步骤一、根据星下点经纬度变化率的表达式推导出需要用到的卫星星下点地面轨迹公式,再在卫星星下点地面轨迹公式中输入卫星对应的轨道参数,构建出对应的卫星星下点轨迹解析表达式。
星下点经纬度变化率的表达式如公式1所示,该式应用于TOD坐标系(true ofdate坐标系)下,仅考虑地球引力势的二阶带谐系数J
其中φ为地心纬度,λ为地心经度,δ为赤纬,α为赤经。i为轨道倾角,u为纬度幅角,Ω为升交点赤经,w
由J
其中,R
将公式(1)的自变量换为纬度幅角u,通过解微分方程,推导得到以地心纬度为自变量的地心经度表达式为:
公式(4)即为卫星星下点地面轨迹公式,其中,常数项C表示卫星当圈的升交点地理经度LAN。λ为地心经度,实际使用为了提高计算精度,需要应用下式将地心纬度转换到地理纬度:
φ
其中φ
地心纬度和纬度幅角的关系可以表达为:
根据上式(6)可以得到对应地心纬度下的卫星纬度幅角u,φ≥0或φ<0时,u均具有两个解。
公式(4)的输入参数包括轨道半长轴a、轨道倾角i、升交点地理经度LAN,其中可以采用轨道半长轴对应的平均轨道半长轴代替轨道半长轴、轨道倾角对应的平均轨道倾角代替轨道倾角。
假设卫星运行平均轨道高度为470km,轨道类型为太阳同步轨道,则取轨道半长轴a=6848.137km,轨道倾角i=97.2934°,升交点地理经度设为LAN=35°。根据公式(4),得到卫星星下点轨迹解析表达式,卫星星下点轨迹解析表达式所表示的卫星星下点轨迹曲线如图2所示,图2为卫星当圈的星下点轨迹,由于极地地区的区域一般可成像目标点很少,所以本实施方式中以南北纬70°之间的成像范围作为主要研究区域。
步骤二、根据星下点经纬度变化率的表达式推导卫星进行最大侧摆的像点坐标表达式,即得到成像范围边界线。
根据星下点经纬度变化率的表达式公式(1),可以推导出地心经度对地心纬度的导数表达式为:
上式(7)中纬度幅角通过公式(6)求解,将纬度幅角带入到公式(7),即可求出地心经度对地心纬度的导数。
假设卫星可成像最大侧摆角为γ,最大侧摆角γ下的成像点与卫星星下点轨迹上成像点(又称轨迹点)连线,这一连线的地心角为β,也就是最大侧摆的像点与该最大侧摆的像点对应的卫星星下点轨迹上成像点连线的地心角,卫星星下点轨迹点经纬度坐标为M=(A
公式(8)即为最大侧摆的像点坐标表达式,也就是最大成像范围边界线表达式。最大成像范围边界线为两条,位于卫星星下点轨迹一侧(左侧)的最大侧摆后的成像范围边界线称为最大侧摆后的成像范围左边界线,位于卫星星下点轨迹另一侧(右侧)的最大侧摆后的成像范围边界线称为最大侧摆后的成像范围右边界线。假设最大侧摆角为40°,得到卫星星下点轨迹对应的最大侧摆成像范围,如图3所示(只考虑南北纬70°之间的成像范围),图3中曲线①为卫星当圈的星下点轨迹,曲线②为卫星当圈星下点轨迹对应的最大成像范围曲线(即最大成像范围边界线)。
步骤三、根据步骤一得到的卫星星下点轨迹解析表达式和步骤二得到的最大侧摆的像点坐标表达式,判断需要成像目标点中落在可成像区域范围内的可成像目标点。
对可成像的目标点的判定主要指的是判定可选目标点是否在该星当前轨道圈次的可成像覆盖范围内,当可选需要成像的目标点数量较多时,需要使用一种简便高效的计算方式进行判定。本申请根据步骤一和步骤二的计算结果,采用同纬度线比对经度的方法进行判定。需要提到的是,对于轨迹上纬度最高的一小段区域,可以采用同经度线比对纬度的方法。考虑一般使用情况,本实施方式只列举同纬度线比对经度的方法。
选取轨道参数同上,考虑±70°纬度范围内,在该纬度范围内本方法适用。下面对该方法进行说明:
首先应用公式(4)构建卫星星下点轨迹的离散点序列,应用公式(8)构建最大成像范围边界线的离散点序列,然后根据需要成像目标点(如图4中的三角块)的纬度搜索到卫星星下点轨迹的离散点序列上(图4中的曲线①)同纬度的点,由于卫星星下点轨迹的离散点以散点表示,所以通过相邻两点插值出卫星星下点轨迹上与需要成像目标点同纬度的点称为P
已知ΔL1、ΔL2和ΔL3,可以判定需要成像目标点在卫星星下点轨迹的左侧还是右侧,若ΔL3和ΔL1正负相同则需要成像目标点位于卫星星下点轨迹左侧,若ΔL3和ΔL2正负相同则需要成像目标点位于卫星星下点轨迹左侧。最后依据下式作为条件进行判断:
|ΔL3|≤|ΔL1|且ΔL3·ΔL1>0 (9)
|ΔL3|≤|ΔL2|且ΔL3·ΔL2>0 (10)
若需要成像目标点满足公式(9)或满足公式(10),则判定可对该点成像,该点为可成像目标点,否则不能对该点成像,该点为不可成像目标点。按照上述方法可以对所有需要成像目标点依次进行成像判定,由于计算量的增加主要体现在插值比较上,所以增加目标点对应计算量增加不明显。
对于经过步骤三判定当轨可以成像的点,下一步需要计算对该点成像所需要的任务参数。任务参数主要包含两个,一个是卫星的成像时刻,一个是卫星成像时的侧摆角。
步骤四、采用单纯形搜索方法粗搜索可成像目标点T在卫星星下点轨迹上成像点范围;根据单纯形搜索方法得到的成像点范围,采用二分法精搜索可成像目标点在卫星星下点轨迹上的成像点Q;根据该可成像目标点T在卫星星下点轨迹上的成像点Q的经纬度,计算该成像点Q的成像时刻,根据该可成像目标点T的经纬度和该可成像目标点T在卫星星下点轨迹上的成像点Q的经纬度,计算卫星对该可成像目标点T成像时的侧摆角,称为卫星成像时的侧摆角,又称需要侧摆的侧摆角。
卫星成像时刻的确定是通过搜索卫星成像时对应的轨迹点实现的,卫星星下点轨迹点的搜索方法为单纯型法结合二分法,示意图如图5所示。
首先使用单纯形搜索方法搜索可成像目标点成像时的星下点轨迹上的成像点的范围,以星下点轨迹上与可成像目标点同纬度的点为搜索起点,具体搜索方法如下:
首先以卫星星下点轨迹上与可成像目标点同纬度点点P
优选的是,上述步骤在搜索第二搜索点之前,也可包括求解T与P
二分法:在搜索到P
通过Q点经纬度计算Q点对应的成像时刻,需要应用该Q点的纬度幅角进行计算,设已知卫星星下点轨迹上某一点的纬度幅角为u
S=S
已知可成像目标点T的经纬度和卫星星下点轨迹上成像点Q的经纬度,则可以进一步求解对T成像时需要侧摆的侧摆角(即卫星成像时的侧摆角),首先根据卫星星下点轨迹上成像点Q的经纬度和可成像目标点T的经纬度求出点Q点T两点的球面距离L
已知QT两点球面距离L
按照轨道高度为470km,轨道类型为太阳同步轨道。轨道半长轴a=6848.137km,轨道倾角i=97.2934°,升交点地理经度LAN=35°,卫星侧摆能力按照最大可以进行±40°侧摆。为了体现计算效果,按照多目标点考虑,假定目标点分布在南北纬70°内,按照经纬度间隔5°分布目标点,总目标点数为2117个,且目标点按照经纬度均匀分布,近似代表了全球所有点的分布特性,目标分布如图8所示。
如图9所示,灰色目标点为判定不在成像范围内的点,黑色目标点为判定在成像范围内的点,可以得到,在2117个目标点中,有131个点在该轨成像范围内。通过和传统方法的结果对比得到上述目标点判定准确,所有判定可成像的目标点都在实际可成像范围内,说明本专利判定方法实际有效。整个计算过程通过intel core i7 1.8GHz处理器计算机仿真用时在0.1s以内,而通过传统轨道积分计算逐个目标点对比的方式估计用时在1h以上,在不失准确性的条件下,本发明的方法计算效率远高于传统方法。
下面以其中1个目标点为例,对可成像点的参数计算结果进行分析,如图10所示,图中米字型目标点在可成像范围内,其经度为+150°,纬度为-50°,标识点(X:-145,Y:49.35)为计算的卫星星下点轨迹上成像点。其对应的成像参数计算结果,与实际验证结果的对比如下表1所示。
表1目标点成像参数计算效果对比
上述误差在实际应用的允许范围内,不失一般性,对于其余目标点,尤其是侧摆较小的点,计算精度与表1相当或更高。
本发明应用“吉林一号”多颗在轨卫星轨道数据,计算效果表明:成像点判定算法高效准确,成像参数计算满足要求。以吉林一号某星535km太阳同步轨道为例,某次任务对应轨道升交点地理经度21.5°,目标点经度为12.67°,纬度为35°。首先判定该目标在该轨成像范围内,如图11,米字型点为目标点,对应成像参数及实际验证结果如表2所示,实际应用效果表明,该算法计算结果准确高效,能够保证实际任务需求。
表2目标点成像参数计算效果对比
对于星上自主任务规划工作来说,成像点快速判定及任务参数计算是保证其进行的基础,同时也是计算量最大的一个环节。成像点快速判定即是,对所有目标成像点是否在未来一段时间内在卫星的成像范围内进行判定。成像点任务参数计算即是,对于可成像的目标点,卫星需要机动的角度(一般指侧摆角)、对应成像时的时刻或者成像时卫星的位置等参数的计算。受计算能力的限制,星上成像点判定及任务参数计算需要在保证精度要求的条件下,计算效率尽量高。本发明地面多目标点成像快速判定及任务参数计算方法能够实现上述功能,能兼顾多个目标点的高效算法,适用于对于星载计算机,且能够短时间内完成计算,计算结果准确高效,能够保证实际任务需求。
- 地面多目标点成像快速判定及任务参数计算方法
- 对地面点目标推扫成像任务参数的星载求解方法