位置推定装置、以及位置推定方法
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及位置推定装置、以及位置推定方法。
背景技术
作为推定车辆的自身位置的技术而具有专利文献1。专利文献1中记载了“检测在车辆周围存在的目标物的位置,并且检测车辆的移动量,基于移动量将目标物的位置作为目标物位置数据进行累积。另外,将目标物位置数据的一部分根据车辆的转弯状态分组化,基于检测到目标物位置数据时的车辆的移动量设定组的调整范围。而且,取得包含目标物的位置在内的地图信息,基于设定的调整范围将目标物位置数据、及地图信息的目标物的位置进行对照,由此推定车辆的自身位置。”。
现有技术文献
专利文献
专利文献1:国际公开第2017/037753号公报
发明内容
在专利文献1的方法中,若不严密地设定各组的调整范围,则会导致自身位置的推定精度的降低。另外,由于当车辆的转弯时会发生分组和调整范围的设定等处理,所以处理负担变大。
本发明的目的为,提供能够更简单地抑制转弯时的位置推定精度的降低的位置推定装置以及位置推定方法。
本发明的位置推定装置的特征在于,具有:第1坐标系数据获取部,其获取由第1坐标系的坐标来表示目标物的位置的第1坐标系数据;第2坐标系数据获取部,其获取由第2坐标系的坐标来表示存在于位置推定对象物周围的目标物的位置的第2坐标系数据,其中,该第2坐标系是基于该位置推定对象物的规定的起点定时下的位置以及姿势而设定的;位置推定部,其对所述第1坐标系数据和所述第2坐标系数据中的各自的所述目标物彼此进行对照,基于对照结果来推定所述第1坐标系中的所述位置推定对象物的位置;和对照范围变更部,其在所述位置推定对象物为转弯中的情况下,缩窄所述第2坐标系数据中用于由所述位置推定部执行的对照的坐标的范围。
发明效果
根据本发明,能够更简单地抑制转弯时的位置推定精度的降低。
附图说明
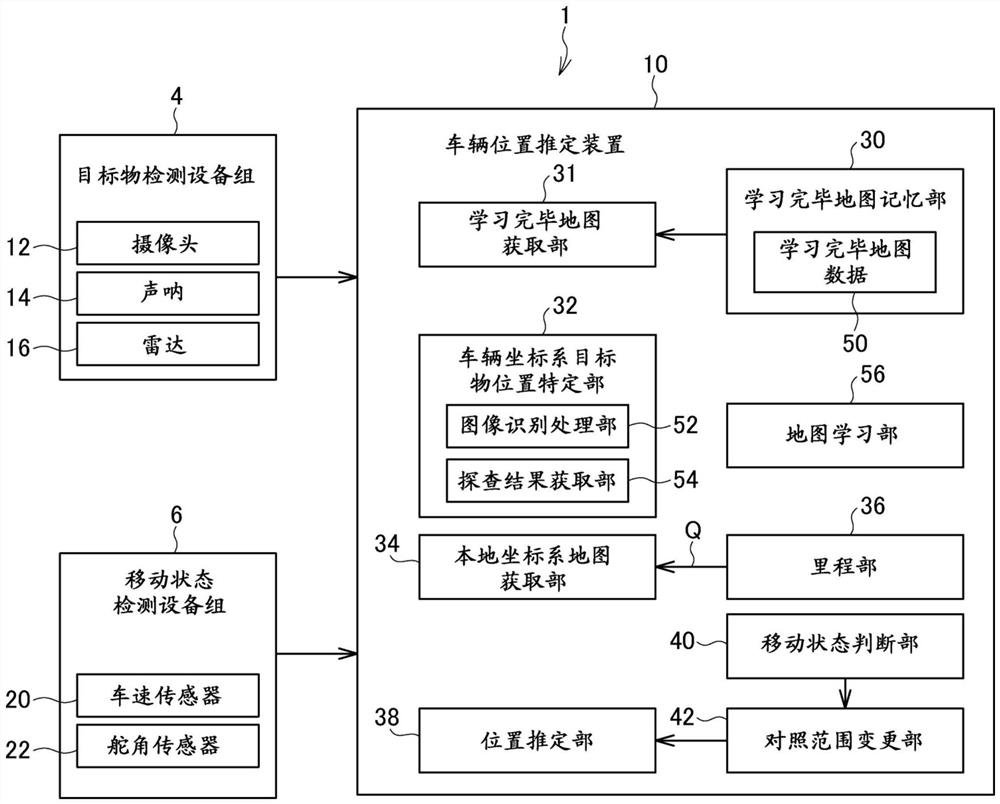
图1是表示本发明的实施方式的车载系统的功能构成的图。
图2是基准坐标系、车辆坐标系、以及本地坐标系的说明图。
图3是里程信息的说明图。
图4是车辆位置推定装置所执行的车辆位置推定处理的流程图。
图5是示意表示学习完毕地图数据以及本地坐标系地图数据的一例的图。
图6是示意表示对照坐标范围被限制后的本地坐标系地图数据的一例的图。
图7是本地坐标系地图数据中的对照坐标范围的扩大动作的说明图。
附图标记说明
1 车载系统
2 车辆
4 目标物检测设备组
6 移动状态检测设备组
10 车辆位置推定装置(位置推定装置)
20 车速传感器
22 舵角传感器
31 学习完毕地图获取部(第1坐标系数据获取部)
34 本地坐标系地图获取部(第2坐标系数据获取部)
36 里程(odometry)部
38 位置推定部
40 移动状态判断部
42 对照范围变更部
50 学习完毕地图数据(第1坐标系数据)
58 本地坐标系地图数据(第2坐标系数据)
Ca 基准坐标系(第1坐标系)
Cb 车辆坐标系
Cc 本地坐标系(第2坐标系)
D 行进方向
Gf 对照坐标范围(坐标的范围)
Q 里程信息
具体实施方式
以下,参照附图来说明本发明的实施方式。
图1是表示本实施方式的车载系统1的功能构成的图。
车载系统1是搭载于车辆2(图2)的系统,具有目标物检测设备组4、移动状态检测设备组6、和车辆位置推定装置10。
目标物检测设备组4具有对存在于车辆2周围的目标物进行检测的一个或多个目标物检测设备,移动状态检测设备组6具有对车辆2的移动状态进行检测的一个或多个移动状态检测设备。另外,车辆位置推定装置10是对供自身搭载的车辆2的位置(以下称“自身位置”)进行推定的车载装置。
目标物检测设备组4所检测的目标物在其他车辆和行人等的移动体的基础上,是能够由检测设备检测到的任意物体。作为该目标物的例子,能够举出在路面上喷涂的各种线(例如,标示车辆通行带的区分线和停车框线等)、和成为车辆2行驶的妨碍的障害物(例如,路肩和护栏、建筑物的墙壁等)等。
目标物检测设备组4作为目标物检测设备而具有摄像头12、声呐14以及雷达16。
摄像头12是拍摄车辆2周围的设备,将拍摄获得的图像(以下称“拍摄图像”)向车辆位置推定装置10输出。在车辆2上,以能够至少拍摄前方、后方、左侧方以及右侧方的各景色(也就是说,整个周围的景色)的方式设置有一个或多个摄像头12。
声呐14是使用声波来探查车辆周围的目标物的设备,雷达16是使用电波来探查车辆2周围的目标物的设备。声呐14以及雷达16将通过探查获得的目标物的位置向车辆位置推定装置10输出。
此外,对于目标物检测设备,不限于上述设备,还能够使用例如激光测距扫描仪(Laser range scanner)等任意的外界传感器。
移动状态检测设备组6所检测的移动状态至少包括车辆2的转弯状态以及车速,作为移动状态检测设备而具有车速传感器20以及舵角传感器22。
车速传感器20检测车辆2的车速,将其向车辆位置推定装置10输出,舵角传感器22检测车辆2的舵角,将其向车辆位置推定装置10输出。
车辆位置推定装置10具有例如ECU(Electronic Control Unit)等计算机单元。该计算机单元具有CPU和MPU等处理器、ROM和RAM等内存设备(也称为主记忆装置)、HDD和SSD等的存储装置(也称辅助记忆装置)、和使各种传感器和周边设备连接的接口回路。处理器执行内存设备或存储装置中所记忆的计算机程序,由此在车辆位置推定装置10中实现各种功能性构成。
具体地,车辆位置推定装置10通过计算机程序的执行,而如图1所示地作为学习完毕地图记忆部30、学习完毕地图获取部31、车辆坐标系目标物位置特定部32、本地坐标系地图获取部34、里程部36、位置推定部38、移动状态判断部40、以及对照范围变更部42而发挥作用。
图2是基准坐标系Ca、车辆坐标系Cb及本地坐标系Cc的说明图。
在本实施方式的车辆位置推定装置10中,作为表示目标物和车辆2的自身位置的坐标系,而如图2所示地使用了基准坐标系Ca(第1坐标系)、车辆坐标系Cb、以及本地坐标系Cc(第2坐标系)的三个坐标系。
基准坐标系Ca是用于特定位置的基准平面坐标系,适当设定了原点Oa、Xa轴以及Ya轴,通过基准坐标系坐标Pa来表示目标物和车辆2的位置。
车辆坐标系Cb是以某个定时中的车辆2的位置以及姿势(车身的朝向)为基准来表现目标物的位置(相对位置)的平面坐标系。
也就是说,如图2所示,在车辆坐标系Cb中,某一定时中的车辆2的位置被设定为原点Ob,车辆2的前后方向被设定为Xb轴,另外,车辆2的左右方向被设定为Yb轴。车辆坐标系Cb在基准坐标系Ca中以使其原点Ob贴附于车辆2的方式移动,另外,Xb轴以及Yb轴的方向以与车身的朝向相应的转动角θ
本地坐标系Cc不同于车辆坐标系Cb,其是不论车辆2的移动以及姿势(车身的朝向),原点Oc的位置、和Xc轴以及Yc轴的方向都在基准坐标系Ca中不变的平面坐标系。也就是说,本地坐标系Cc是如下的坐标系,在基准坐标系Ca中,其原点Oc位于固定的坐标点,另外Xc轴以及Yc轴以固定的转动角θ
在本实施方式中,基于规定的起点定时T0下的车辆2的位置以及姿势来设定本地坐标系Cc。起点定时T0是至少最初的目标物检测定时Ta以前的恰当的定时,在本实施方式中,车辆2的发动机启动时的定时被用作起点定时T0。此外,以下将本地坐标系Cc的坐标称为本地坐标系坐标Pc。
返回至上述图1,学习完毕地图记忆部30预先记忆学习完毕地图数据50。学习完毕地图数据50是预先记录有处于车辆2的行驶路径上以及存在于其周边的目标物(标示路肩、和车辆通行带的区分线等)的基准坐标系Ca中的位置的既成数据,是在位置推定中成为基准的地图数据。上述学习完毕地图数据50基于后述的本地坐标系地图数据58而生成。
学习完毕地图获取部31从学习完毕地图记忆部30读取上述学习完毕地图数据50而将其获取,并将其向位置推定部38输出。此外,学习完毕地图获取部31也可以从不同于车辆位置推定装置10的其他装置获取学习完毕地图数据50。作为其他装置,能够举出在车载系统1中设置的恰当的记忆装置、和能够通过电气通信回路通信地连接的车辆2之外的计算机等。
车辆坐标系目标物位置特定部32在每个规定的目标物检测定时Ta,基于来自目标物检测设备组4的输入信号来特定此时存在于车辆2周围的目标物的位置。对该位置使用上述的车辆坐标系Cb。
车辆坐标系目标物位置特定部32具有图像识别处理部52和探查结果获取部54,图像识别处理部52通过对摄像头12的拍摄图像进行图像识别而特定表示目标物位置的车辆坐标系坐标Pb,另外,探查结果获取部54基于声呐14以及雷达16的探查结果来特定表示目标物位置的车辆坐标系坐标Pb。
此外,对于图像识别处理部52的图像识别,能够使用可将映射至拍摄图像内的目标物识别的公知或周知的恰当的识别方法。另外,摄像头12的焦点距离和拍摄元件尺寸等的内部参数、以及摄像头12向车辆2的安装位置和安装姿势、即外部参数预先保存于ROM等内存设备,图像识别处理部52使用这些内部参数以及外部参数来计算拍摄图像所映射的目标物与摄像头12之间的位置关系(也就是说,目标物对于车辆2的相对位置)。
另外,预先求出将声呐14以及雷达16的探查结果所示的目标物的位置转换为车辆坐标系Cb中的车辆坐标系坐标Pb的转换式,探查结果获取部54使用该转换式来特定目标物的车辆坐标系坐标Pb。
由车辆坐标系目标物位置特定部32特定的目标物的车辆坐标系坐标Pb例如依次累积至RAM等的内存设备。
本地坐标系地图获取部34基于由车辆坐标系目标物位置特定部32特定的目标物的车辆坐标系坐标Pb、和车辆2的里程信息Q来生成本地坐标系地图数据58(图5),由此获取该本地坐标系地图数据58。
本地坐标系地图数据58是包括如下目标物的各自位置在内的数据,该目标物是在到某时点为止的一次或多次的目标物检测定时Ta中由车辆坐标系目标物位置特定部32所特定的目标物。该位置由本地坐标系Cc的本地坐标系坐标Pc表示。也就是说,本地坐标系地图数据58是以本地坐标系Cc所设定的上述起点定时T0为起点而生成的临时数据。
图3是里程信息Q的说明图。
如图3所示,里程信息Q是使用本地坐标系Cc来表示在某一定时Tn中的车辆2的位置Qp以及转动角Qθ的信息。
车辆2的位置Qp对应于在某一定时Tn中的车辆坐标系Cb的原点Ob,另外,转动角Qθ对应于本地坐标系Cc内的车辆坐标系Cb的Xb轴以及Yb轴的转动角。也就是说,在各个目标物检测定时Ta都不同的车辆坐标系Cb的各车辆坐标系坐标Pb通过使用在所对应的目标物检测定时Ta中的里程信息Q,能够转换为本地坐标系Cc的本地坐标系坐标Pc。
本地坐标系地图获取部34在通过生成而获取本地坐标系地图数据58时,针对每个由车辆坐标系目标物位置特定部32特定的目标物的车辆坐标系坐标Pb,使用该目标物被特定时的里程信息Q,而将车辆坐标系坐标Pb转换为本地坐标系坐标Pc。通过该转换,能够获取将彼此不同的车辆坐标系Cb的各目标物绘制(mapping)到作为车辆2所固有的本地坐标系Cc内的本地坐标系地图数据58。
此外,本地坐标系地图数据58的生成可以每当目标物的车辆坐标系坐标Pb由车辆坐标系目标物位置特定部32特定时(也就是说,每当目标物检测定时Ta中)进行,也可以在多次的目标物检测定时Ta之后,将各个目标物检测定时Ta所特定的目标物汇总为对象而进行。
返回图1,里程部36与目标物检测定时Ta同步地特定上述的里程信息Q,并向本地坐标系地图获取部34输出。
具体地,里程部36分别对于由车速传感器20按顺序检测到的车速、以及由舵角传感器22按顺序检测到的舵角从上述起点定时T0到现时点进行累积运算,由此求出本地坐标系Cc中的现时点中的车辆2的位置Qp、以及车身的转动角Qθ。
此外,对于从车速以及舵角求出里程信息Q的方法,能够使用周知或公知的恰当的航位推算技术。
位置推定部38对由本地坐标系地图获取部34获取的本地坐标系地图数据58、和由学习完毕地图获取部31获取的学习完毕地图数据50的各自中所记录的共通的目标物彼此进行对照(也称为“匹配(matching)”)。而且位置推定部38使用对照结果来特定学习完毕地图数据50的基准坐标系Ca中与车辆2的现在的位置(也就是说原点Ob)对应的基准坐标系坐标Pa。该基准坐标系坐标Pa成为车辆2的自身位置的推定结果。
移动状态判断部40以及对照范围变更部42是为了提高车辆2转弯时基于位置推定部38执行的位置推定的精度而设的功能性构成部。
移动状态判断部40基于移动状态检测设备组6的检测结果来判断车辆2的转弯及车速。车辆2的转弯基于舵角来判断,在舵角为规定角度(例如90度)以上的情况下,判断为车辆2处于转弯状态。
对照范围变更部42基于车辆2的移动状态来变更本地坐标系地图数据58中为了与学习完毕地图数据50的对照所用的坐标范围(以下称为“对照坐标范围”,标注附图标记Gf)。
具体地,在车辆2为转弯中的情况下,对照范围变更部42在记录于本地坐标系地图数据58的坐标范围中将对照坐标范围Gf限制于车辆2的行进方向D(图5、图6)前方而使其变狭窄。另外,当车辆2的转弯结束时,对照范围变更部42解除对照坐标范围Gf的限制而使其恢复为限制前。当该解除时,对照范围变更部42以与车辆2的车速相应的程度将对照坐标范围Gf逐渐扩大。
图4是车辆位置推定装置10所执行的自身位置推定处理的流程图。
自身位置推定处理是用于推定车辆2的自身位置的处理,在需要进行使用航位推算技术的自身位置推定的恰当的定时,执行一次或多次。作为该定时,能够举出例如当车辆2在GNSS(Global Navigation Satellite System)的电波难以传播到的隧道内行驶时使用航位推算技术来推定自身位置的定时、或例如当需要以比GNSS的测位解析能力高的解析能力来进行车辆控制(例如自动驾驶控制)时使用航位推算技术来推定自身位置的定时等。
另外,如上所述,本地坐标系地图获取部34从起点定时T0(在本实施方式中为车辆2的发动机启动时)按顺序生成本地坐标系地图数据58,由此车辆位置推定装置10获取该本地坐标系地图数据58,该本地坐标系地图数据58按顺序更新记录至RAM等内存设备。
如图4所示,在车辆位置推定装置10推定车辆2的自身位置的情况下,学习完毕地图数据50被读取至位置推定部38(步骤S1),位置推定部38进行学习完毕地图数据50与本地坐标系地图数据58之间的对照(匹配)。当该对照时,首先,对照范围变更部42基于该时点中的车辆2的移动状态,来变更本地坐标系地图数据58的对照坐标范围Gf。
具体地,在移动状态判断部40判断为车辆2处于转弯中的情况(步骤S2:是)下,对照范围变更部42将本地坐标系地图数据58的对照坐标范围Gf限制于与现时点的车辆2相比的行进方向D前方,由此缩窄该对照坐标范围Gf(步骤S3)。
而且,位置推定部38对分别在本地坐标系地图数据58的对照坐标范围Gf、和学习完毕地图数据50中记录的共通的目标物彼此进行对照(步骤S4),并基于对照结果来推定基准坐标系Ca中的车辆2的自身位置(步骤S5)。
图5是示意表示学习完毕地图数据50、以及本地坐标系地图数据58的一例的图。在该图中表示了记录有T字路周边的目标物(例如路肩和白线等)的位置的学习完毕地图数据50、以及本地坐标系地图数据58。另外,在该图中,表示T字路的路面的轴K的线、以及表示车辆2的矩形是分别为了易于理解而恰当表示的,并非记录于学习完毕地图数据50、以及本地坐标系地图数据58中的图形。
在本实施方式的车辆位置推定装置10中,预先规定了舵角与转动角Qθ之间的关系的参照数据存储于内存设备或存储装置,在由移动状态判断部40判断为车辆2处于转弯中的情况下,里程部36参照该参照数据,并基于车辆2的舵角来特定车辆2的转动角Qθ。
但是,根据参照数据的精度和车辆2的个体差异、转弯时的车身的打滑等的各种重要原因,在基于航位推算获得的转弯时的里程信息Q中,易于针对转动角Qθ和车辆2的位置产生误差。由于产生该误差,会对本地坐标系地图数据58中所记录的目标物的位置产生误差,在与学习完毕地图数据50的目标物的位置之间产生不一致。例如在图5的例子中,对Y字路周围的目标物产生了误差,在Y字路的各路面的轴K所成的角度α中产生了不一致。而且,在产生了该不一致的状态下,若进行上述步骤S4的对照,则对照精度降低,作为结果,导致步骤S5中的自身位置的推定精度的降低。
在本实施方式中,如上所述,在由移动状态判断部40判断为车辆2处于转弯中的情况(步骤S2:是)下,如图6所示,本地坐标系地图数据58的对照坐标范围Gf被限制于与车辆2相比的行进方向D前方的范围而被缩窄。通过该限制,在本地坐标系地图数据58中,仅与车辆2相比存在于行进方向D前方的坐标范围内的目标物用于与学习完毕地图数据50之间的对照,由此能够不易产生两者对照时的误差,能够抑制自身位置推定的精度降低。
另外,本地坐标系地图数据58的对照坐标范围Gf并非与车辆2的行进方向D为相反方向的范围,也就是说并非车辆2已经驶过的范围,而设定为车辆2随后要驶入的范围(行进方向D前方的范围),由此即使在缩窄对照坐标范围Gf的情况下,也能够维持自身位置相对于驶入对象的推定精度。
此外,当对照坐标范围Gf被限制时,该限制的边界M(图6)以车辆2为基准来规定。在该情况下,边界M也可以以将车辆2横截的方式规定,也可以以在车辆2外延伸的方式规定。
返回上述的图4,在由移动状态判断部40判断为车辆2没有处于转弯中(步骤S2:否)而是转弯结束紧后的情况(步骤S6:是)下,也就是说,在本地坐标系地图数据58中的对照坐标范围Gf与限制前相比被缩窄的情况下,对照范围变更部42以与车速相应的程度且以限制前的对照坐标范围Gf的宽阔程度为限度而将该对照坐标范围Gf向与车辆2的行进方向D的相反方向扩大(步骤S7)。
更具体地,如图7所示,对照范围变更部42将边界M从转弯结束紧后的位置向与行进方向D的相反方向移动了与车速相应的距离L而将对照坐标范围Gf扩大。
而且,位置推定部38对分别在本地坐标系地图数据58中的扩大后的对照坐标范围Gf、和学习完毕地图数据50中记录的共通的目标物彼此进行对照(步骤S4),基于对照结果来推定基准坐标系Ca中的车辆2的自身位置(步骤S5)。
这样地,对照坐标范围Gf在转弯结束紧后不会一次性地返回至最初范围,由此在转弯结束紧后中,不会导致以转弯时的里程信息Q所含的误差为起因的自身位置推定精度的降低。
在此,转弯结束后的车速越快,单位时间内的车辆2的行驶距离越大。在该情况下,若构成为,以车辆2为基准每次固定量地扩大对照坐标范围Gf,则对照坐标范围Gf的大小相对于车辆2的行驶距离并不充分。
相对于此,在本实施方式中对照坐标范围Gf在车辆2的转弯后以与车速相应的程度逐渐扩大,因此能够确保与车辆2的快慢和行驶距离相适的充分大小的对照坐标范围Gf,能够防止自身位置推定精度的降低。此外,当扩大对照坐标范围Gf时,也可以代替车速而使用行驶距离。
此外,在图4所示的自身位置推定处理中,当由移动状态判断部40判断为车辆2并非处于转弯中(步骤S2:否)且也不处于转弯结束紧后时(步骤S6:是),在不受到基于对照范围变更部42进行的对照坐标范围Gf的限制的状态下,位置推定部38对照本地坐标系地图数据58和学习完毕地图数据50(步骤S4),推定自身位置(步骤S5)。
车辆位置推定装置10在自身位置推定处理后的适当的定时进行基于本地坐标系地图数据58来对学习完毕地图数据50进行学习的处理。
具体地,车辆位置推定装置10具有对学习完毕地图数据50进行学习的地图学习部56(图1),地图学习部56在适当的定时基于本地坐标系地图数据58来更新学习完毕地图数据50而进行学习。在上述学习中,地图学习部56在本地坐标系地图数据58与学习完毕地图数据50之间的对照的结果是两者的一致性为规定值以上的情况下,由本地坐标系地图数据58来更新学习完毕地图数据50。另外,地图学习部56在本地坐标系地图数据58所示的区域的学习完毕地图数据50没有记忆在学习完毕地图记忆部30的情况下,将该区域的本地坐标系地图数据58增加至学习完毕地图数据50中,由此对该区域的地图进行学习。
根据上述的实施方式,起到如下的效果。
在本实施方式中,具有对照范围变更部42,其在车辆2处于转弯中的情况下,缩窄本地坐标系地图数据58中由位置推定部38进行的对照所用的对照坐标范围Gf。
由此,本地坐标系地图数据58中,仅存在于被缩窄的坐标范围内的目标物用于与学习完毕地图数据50之间的对照,由此难以产生对照时的误差,能够抑制自身位置推定的精度降低。
在本实施方式中,对照范围变更部42将对照坐标范围Gf限制于与车辆2相比的行进方向D前方,由此缩窄该对照坐标范围Gf。
由此,即使在对照坐标范围Gf缩窄的情况下,能够维持自身位置相对于车辆2的驶入对象的推定精度。
在本实施方式中,对照范围变更部42在转弯结束后恢复对照坐标范围Gf的情况下,将该对照坐标范围Gf逐渐扩大。由此,对照坐标范围Gf不会当转弯结束紧后一次性地返回至限制前的范围,转弯时的里程信息Q所含的误差的影响并不会变大,因此能够抑制自身位置推定精度的降低。
在本实施方式中,对照范围变更部42以与车辆2的快慢相应的程度将对照坐标范围Gf逐渐扩大。能够确保与车辆2的快慢相适的充分大小的对照坐标范围Gf,能够防止自身位置推定精度的降低。
上述实施方式只不过例举了本发明的一个方式,能够在不脱离本发明主旨的范围内任意进行变形以及应用。
在上述实施方式中,本地坐标系地图获取部34虽然通过生成本地坐标系地图数据58而将其获取,但并不限于此。也就是说,本地坐标系地图获取部34也可以从不同于车辆位置推定装置10的其他装置获取本地坐标系地图数据58。
在上述实施方式中,作为基准坐标系Ca而使用了设定于车辆2的坐标系,但并不限定此,可以为地理坐标系等的坐标系(也就是说,不依存于车辆2的坐标系)。
图1所示的功能模块是为了易于理解本申请发明而根据主要的处理内容分类表示车载系统和车辆位置推定装置的构成要素的概略图,这些构成要素能够根据处理内容分类为更多的构成要素。另外,也能够以使一个构成要素执行更多的处理的方式分类。
本发明并不限于车辆,能够用于将任意的移动体作为位置推定对象物的自身位置推定。
- 物体位置推定系统、物体位置推定装置、物体位置推定方法及物体位置推定程序
- 物体位置推定系统、物体位置推定装置、物体位置推定方法及物体位置推定程序