一种系留式农用无人机橡胶树减飘施药系统及施药方法
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及无人机施药系统及施药方法,具体涉及一种系留式农用无人机橡胶树减飘施药系统及施药方法。
背景技术
橡胶因其具有良好的绝缘性、弹性、可塑性,并具有隔水、隔气、耐磨和抗拉等优点,广泛地运用于工业、国防、交通、医药卫生等各个领域,是不可或缺的重要资源。伴随着经济的发展,社会对于橡胶产品的需求量也在不断扩大。我国橡胶树有记载病害112种,虫害182种,造成影响较为严重的病虫害主要有白粉病、炭疽病、红根病、褐根病等病害以及六点始叶螨、小蠹虫、蚧壳虫等虫害。我国每年因病虫害而造成的损失可达全年橡胶总产量25%,2008年云南西双版纳橡胶白粉大流行,推迟开割1-2个月,减产43.9%,当年损失高达5亿元左右。
橡胶树作为一种高直树木的代表,其树高可达20-40米,树干通直,树冠主要分布在树体中上部。由于冠层过高,防治病虫害时采用地面机械或者人工喷药方式进行作业较为困难。如果采用小型无人机空中喷施作业会存在林木密度大进而限制飞行器飞行作业空间的问题,同时由于无人机电池电量有限、载药量较小以及橡胶树树冠密集喷施用药量要求较高,还存在着无人机橡胶树施药作业效率不高的问题。另外无人机一般是在树冠上部飞行,喷头都是以水平向下的方式安装在无人机机腹位置,以如此的喷头布置方式对橡胶树进行喷施作业,通常会导致橡胶树冠层下部及叶片背面的着药效果较差,进而影响防治效果。
发明内容
本发明的目的在于克服上述存在的问题,提供一种系留式农用无人机橡胶树减飘施药系统,该橡胶树减飘施药系统能够持续有效地对树体高直的橡胶林进行精准喷施作业。
本发明的另一个目的在于提供一种系留式农用无人机橡胶树减飘施药方法。
本发明的目的通过以下技术方案实现:
一种系留式农用无人机橡胶树减飘施药系统,包括无人机和停留在地面上的无人车,所述无人机的下方挂载有用于向橡胶树喷洒药液农药的喷施装置;所述无人车与无人机之间设有用于为无人机输送电能和为喷施装置输送药液农药的系留线缆;
所述喷施装置包括环形气帘辅助施药器,该环形气帘辅助施药器通过平行连杆连接在无人机上;所述环形气帘辅助施药器由喷药内圆环和喷气外圆环构成,所述喷药内圆环与喷气外圆环固定连接;所述喷药内圆环与上设有若干个用于喷洒液态农药的航空喷头;所述喷气外圆环与鼓气装置连通,该喷气外圆环上设置有多个沿着圆周方向分布的喷气孔,所述喷气孔的出气方向与喷气外圆环的轴线方向。
上述系留式农用无人机橡胶树减飘施药系统的工作原理为:
工作时,无人车先搭载无人机到作业区域,然后无人机携带喷施装置升空,并停留在预定的高度上,接着无人车通过系留线缆往喷施装置中输送药液农药,再通过航空喷头将药液喷向橡胶树。其中,由于多个喷气孔沿着圆周方向围在航空喷头,可以在施药时形成气帘,辅助内部的药液有效沉降,减轻药液雾滴飘移。
在喷施的过程中,无人车通过系留线缆持续地往无人机输送电能,使得无人机具有持续续航的能力,直接完成喷施工作。
本发明的一个优选方案,其中,所述平行连杆由四连杆结构构成,该四连杆结构的机架固定连接在无人机上;所述环形气帘辅助施药器固定连接在所述四连杆结构的连杆上;所述四连杆结构的连架杆与舵机的驱动轴连接。通过上述结构,可以对航空喷头的位置进行多自由度灵活调节,适用不同的喷施要求,提高喷施效果。
优选地,所述四连杆结构的连杆上设有若干个用于实时测定橡胶树冠层变化、喷施雾滴空间分布以及靶标有效着药等关键信息的靶标施药效果辅助测定传感器;具体地,所述靶标施药效果辅助测定传感器为激光传感器或超声波传感器或红外传感器以及视觉传感器的一种或多种。
本发明的一个优选方案,其中,所述航空喷头为扇形喷头或圆锥喷头或其它以液力为雾化源的压力式喷头。
本发明的一个优选方案,其中,所述喷施装置还包括高空储药箱和雾化泵,该雾化泵设在高空储药箱内;所述高空储药箱通过药液输送管与环形气帘辅助施药器连通。
优选地,所述喷施装置还包括喷施控制处理器,该喷施控制处理器与舵机、雾化泵、电连接。在工作中,能够根据控制模块的控制指令对微型雾化泵的压力及平行连杆的布置方式进行实时调节。
本发明的一个优选方案,其中,所述无人车上设有后台控制模块,该后台控制模块用于接收无人机和喷施装置的工作数据,实时对接收到的数据信息进行处理分析,能够生成施药作业处方图,规划施药作业路径,确定平行连杆实时展开姿态,控制喷雾压力,确定各施药区域的药液喷施用量以及对药液飘移情况做出模拟评估;并控制喷施装置进行喷施工作以及控制无人车的行进和无人机的飞行。
本发明的一个优选方案,其中,还包括安全模块,该安全模块包括飞行安全传感器和环境安全传感器,其中,所述飞行安全传感器安装在无人机上,用于实时测定飞行高度、飞行速度、旋翼转速、机身俯仰角度、飞行电压、飞行路径以及周边障碍物信息等飞行数据;
所述环境安全传感器分别设置在智能无人车和无人机上,用于实时测定作业区域空间内的气象信息与无人机周围的大气及旋翼气流扰动情况,所述飞行安全传感器监测到的飞行数据信息和环境安全传感器监测到的环境数据信息通过无线通讯的方式回传至后台控制模块。
本发明的一个优选方案,其中,所述无人车上设有若干个沉积量采样分析传感器,所述沉积量采样分析传感器水平朝上放置,该沉积量采样分析传感器上方为空旷无遮挡的空间。通过上述结构,由于沉积量采样分析传感器具有自净式连续药液采集能力,能够在较短的时间间隔内连续多次采集并分析雾滴沉积情况,可实时测定喷施作业过程中雾滴在地面的逸散沉降情况以评估农药脱靶率,进而为后台控制模块制定喷施决策提供参考。
本发明的一个优选方案,其中,所述系留线缆的内部设有用于输送药液的内管路和用于输送电能、电信号的外管路,所述内管路中设置有用于防治药液农药回流地面的单向阀门;
所述外管路包裹在内管路之外,该外管路分隔成多个隔舱,多个隔舱分别用于收纳供电线、无损数据传输线、备用供电线、备用无损数据传输线和轻质高强度抗割索绳。
优选地,所述系留线缆连接在无人车的一端缠绕在绕放线器上,另一端通过紧急脱钩装置与无人机连接。通过上述结构,可根据实际作业需求对系留线缆进行绕放操作,若遇紧急情况可进行线缆脱离操作,此时切换至机载紧急备用电池为无人机供电。
本发明的一个优选方案,其中,所述无人车的顶部上设有药液回收装置,该药液回收装置呈漏斗形状,由柔性防腐蚀材料制成,可根据橡胶树行间距大小折叠伸缩,用于高空施药地面流失药液的回收,经净化处理后可药液可再利用,可进一步减少农药对土地的污染、提高农药利用率。
一种系留式农用无人机橡胶树减飘施药方法,包括以下步骤:
(1)施药作业前,利用安装有激光雷达的遥感测绘无人机对作业橡胶林进行航空遥感图像信息采集,获取施药区域的遥感影像,构建作业区域内所有橡胶树的树形病理三维点云成像图,将遥感数据信息传送至控制模块;
(2)控制模块对接收到的遥感数据信息进行分析处理,规划形成施药作业路径与施药作业处方图,并确定多自由度喷杆的安装长度、初始喷施姿态以及喷头安装类型与数量;
(3)将喷施装置安装至无人机上,并安装系留线缆;
(4)无人机自无人车的顶部起降平台起飞至橡胶林第一阶段作业路径指定初始喷施位置悬停,喷施控制处理器调节平行连杆的姿态,使环形气帘辅助施药器移动至设定的位置上;
(5)无人车为无人机的高空储药箱供药,当药液量检测传感器监测到药量达到高空储药箱量容积的50%时,喷施装置开始对橡胶树进行施药作业,无人车在无人机的下方同步行进;在航空喷头喷施的过程中,鼓风装置往喷气外圆环输送高速的气流,高速的气流在多个沿着圆周方向分布的喷气孔喷出,在航空喷头的外侧形成密封气帘,减少雾滴的飘移;
(6)控制模块实时对回传的传感器数据信息进行分析处理,结合施药作业处方图及时修正无人车与无人机的行进作业参数,并根据地面的沉积量采样分析传感器评估的雾滴脱靶情况、无人机周围的气流扰动情况以及橡胶树实际长势特点对喷施控制处理器下达控制指令,精准调整微型雾化泵的喷施压力以及平行连杆的布置姿态,保证当下作业橡胶树冠层的最佳受药效果;
(7)橡胶树第一阶段作业路径喷施作业结束后,喷施装置暂停工作,无人机和无人车移动行进至下一阶段作业路径指定位置,继续重复进行步骤(4)至(6)操作,直至全部喷施作业任务结束。
本发明与现有技术相比具有以下有益效果:
1、本发明采用系留式无人机进行作业,人员劳动强度降低,同时人药分离,人员操作无需进地,安全性得到提升,对身体损伤的可能性也大幅减小。
2、相比于常规的无人机施药作业方式,本发明可以在施药时形成气帘,辅助内部的药液有效沉降,减轻药液雾滴飘移,使得药液直达冠层靶标位置,沉积效果更为优异,提高农药的利用率。
3、本发明的系留式农用无人机橡胶树减飘施药系统续航能力强,有效作业时间长,作业效率大幅提升,系留式的作业方式使得无人机载重量有效减轻,飞行调控更为便捷,也使得作业更为安全可靠。
4、本发明的系留式农用无人机橡胶树减飘施药系统施用简便、高效,便于安装拆卸,成本较低,智能化水平高,易于推广普及,适用于突发性强、防控难度大的橡胶树病虫害防治工作。
附图说明
图1是本发明的系留式农用无人机橡胶树减飘施药系统的整体框架流程图。
图2是施药模块的框架流程图。
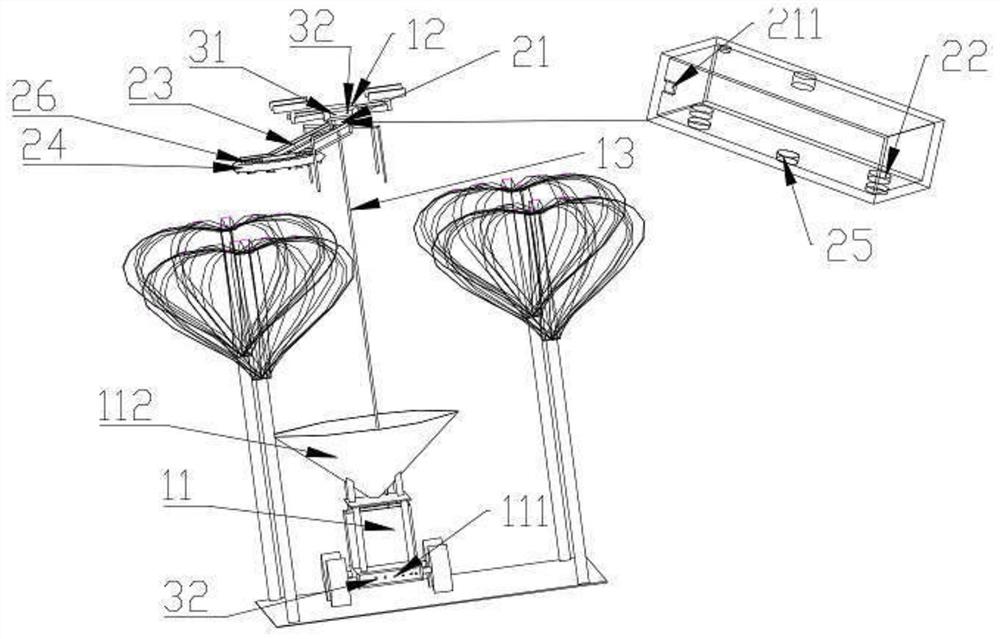
图3为本发明的系留式农用无人机橡胶树减飘施药系统进行喷施工作的结构简图。
图4为图3中的环形气帘辅助施药器的立体结构示意图。
图5为图3中的平行连杆的立体结构示意图。
图6为图3中的系留线缆的横截面结构示意图。
具体实施方式
为了使本领域的技术人员很好地理解本发明的技术方案,下面结合实施例和附图对本发明作进一步描述,但本发明的实施方式不仅限于此。
参见图1-图3,本发明的系留式农用无人机橡胶树减飘施药系统,包括系留模块1、施药模块2、安全模块3以及控制模块4,其中,所述系留模块1包括设置在地面的智能无人车11、在空中进行航空喷施作业的农用无人机12以及系留线缆13,其中,所述智能无人车11可在橡胶树行间行进,并搭载有相关系留施药系统作业部件和维修工具部件,用于为农用无人机12进行药液及电力供给以及相关维护保养工作;所述农用无人机12为由智能无人车11提供电力能源的单旋翼或多旋翼系留式电动无人机,用作对橡胶树进行高空农药喷施作业的载体,通过系留线缆13与下方智能无人车11相连接,除常规无人机飞行结构部件外,还安装有旋翼保护软罩、作业负载连接装置、变压稳压器、系留线缆紧急脱钩装置以及机载紧急备用电池;所述系留线缆13由超轻型复合材料制成,两端分别与智能无人车11和农用无人机12相连接,是智能无人车11为农用无人机12补给药液、供应电力及二者进行数据信息传输的通道。
参见图3-图5,所述施药模块2通过作业负载连接装置挂载于农用无人机12机身下方,包括高空储药箱21、微型雾化泵22、平行连杆23、环形气帘辅助施药器24、喷施控制处理器25、以及实时靶标施药效果辅助测定传感器26,其中,所述高空储药箱21体积小巧,主要用作地面供给药液的高空临时储存转运,还可以借助药液自身液体重力排除下一阶段输药管路中的空气,防治气体混入影响施药雾化效果;所述微型雾化泵22安装在高空储药箱21内部,用于将高空储药箱内21的药液加压输送至喷头24处进行喷施雾化处理;所述平行连杆23上侧连杆与无人机机身固定并带动其余连杆机构,下侧连杆设置有若干个传感器安装位置;所述环形气帘辅助施药器24与平行连杆下端连接,用于施药时形成气帘,辅助药液有效沉降、减轻飘移;所述喷施控制处理器25能够根据控制模块4的控制指令对微型雾化泵22的压力及平行连杆23的布置方式进行实时调节;所述靶标施药效果辅助测定传感器26为激光传感器或超声波传感器或红外传感器以及视觉传感器的一种或多种,安装在平行连杆23下侧位置,用于实时测定橡胶树冠层变化、喷施雾滴空间分布以及靶标有效着药等关键信息,信息实时回传控制模块4,协助喷施控制处理器25的实时调节。
参见图3-图5,所述平行连杆23主体为平行四连杆结构,上侧连杆231与无人机机身固定,并通过与上侧连杆231两端节点相连接的两个舵机控制调节连杆整体姿态,可实现下侧连杆232灵活平行移动。
参见图3-图5,所述环形气帘辅助施药器24整体为内外圆环嵌套结构,内部圆环结构241安装有若干航空喷头,用于对靶喷施农药;外部圆环结构242设置有垂直于机身平面方向的若干喷气孔,沿外部圆环呈阵列状分布,用于施药时形成气帘,辅助药液有效沉降、减轻飘移;所述航空喷头为扇形喷头或圆锥喷头或其它以液力为雾化源的压力式喷头。
参见图1-图2,所述安全模块3包括飞行安全传感器31和环境安全传感器32,其中,所述飞行安全传感器31安装在农用无人机12上,用于实时测定飞行高度、飞行速度、旋翼转速、机身俯仰角度、飞行电压、飞行路径以及周边障碍物信息等飞行数据;所述环境安全传感器32分别设置在智能无人车11和农用无人机12上,用于实时测定作业区域空间内的气象信息与农用无人机12周围的大气及旋翼气流扰动情况,所述飞行安全传感器31监测到的飞行数据信息和环境安全传感器32监测到的环境数据信息通过无线通讯的方式回传至控制模块4。
参见图1-图2,所述控制模块4设置于地面上,用于接收系留模块1、施药模块2以及安全模块3回传的各类数据信息,实时对接收到的数据信息进行处理分析,能够生成施药作业处方图,规划施药作业路径,确定平行连杆23实时展开姿态,控制喷雾压力,确定各施药区域的药液喷施用量以及对药液飘移情况做出模拟评估;并远程控制施药模块2工作;该控制模块4还用于在实际作业过程中实时控制智能无人车11的行进和农用无人机12的飞行。
具体地,所述施药系统的施药对象为橡胶树,农用无人机在橡胶树上方进行飞行施药工作,智能无人车在下方随同行进,要求橡胶林为规划良好的平缓林段,种植较为规范,修剪整齐,行株距整齐笔直,行距不小于10米,株距不小于2米,每667m2橡胶树种植株数在30株左右。
参见图3,所述智能无人车11系留施药系统作业部件包括混配药装置、车载储药箱、沉积量采样分析传感器111、供药泵、高压直流电源、高压直流稳压器、绕放线器以及通讯定位装置。同时,智能无人车顶部还设置有药液回收装置112,装置呈漏斗形状,由柔性防腐蚀材料制成,可根据橡胶树行间距大小折叠伸缩,用于高空施药地面流失药液的回收,经净化处理后可药液可再利用,可进一步减少农药对土地的污染、提高农药利用率。
进一步,所述沉积量采样分析传感器111设置在智能无人车11车体外侧,设置数量若干个,采样工作时采样面水平朝上放置,要求上方空旷无遮挡;该沉积量采样分析传感器111具有自净式连续雾滴采集能力,能够在较短的时间间隔内连续多次采集并分析雾滴沉积情况,可实时测定施药系统喷施作业过程中雾滴在地面的逸散沉降情况以评估农药脱靶率,进而为控制模块4制定施药决策提供参考。
参见图6,所述系留线缆13包括内外双层管路,其中内层管路131为输药管路,管路具有柔韧性和抗腐蚀性;外层管路132包裹在内层管路之外,由绝缘材料进一步被分隔为5个隔舱,分别设置对应通过供电线1321、无损数据传输线1322、备用供电线1323、备用无损数据传输线1324和轻质高强度抗割索绳1325共5种线缆,充分保证了系留线缆13工作的可靠性;农用无人机12作业过程中的飞行数据信息、传感器采样信息等所有相关数据信息通过系留线缆13的无损数据传输线1322传输至智能无人车11的存储器内进行备份储存。
进一步,所述系留线缆13地面端缠绕于绕放线器上,可根据实际作业需求对系留线缆13进行绕放操作,空中端通过系留线缆紧急脱钩装置与农用无人机12相连,若遇紧急情况可进行线缆脱离操作,此时切换至机载紧急备用电池为农用无人机12供电。
具体地,所述高空储药箱21内部还安装有药液量检测传感器211,可实时监测智能无人车11供给的药液量以保证供药量在合理范围内避免药液不足喷头24空喷或者高空储药箱21药液储存过量现象。
具体地,所述控制指令通过控制模块4对环境气象参数、路径参数、飞行参数、翼尖气流扰动信息、旋翼风场、作物冠层信息、喷幅范围、作物处方施药量等数据信息进行实时汇总处理得出,并由控制模块4下达传送至施药模块2的喷施控制处理器25。
参见图1-图5,本实施例中的系留式农用无人机橡胶树减飘施药方法,包括以下步骤:
(1)施药作业前,利用安装有激光雷达的遥感测绘无人机对作业橡胶林进行航空遥感图像信息采集,获取施药区域的遥感影像,构建作业区域内所有橡胶树的树形病理三维点云成像图,之后相关遥感数据信息传送至控制模块4。
(2)控制模块4依次与其它各模块进行通讯调试,确保数据传输通信及作业控制正常,环境安全传感器32开始对施药区域的气象数据进行采集,并回传至控制模块4。
(3)控制模块4对接收到的遥感数据信息和环境气象信息进行分析处理,初步规划形成若干行间施药作业路径与施药作业处方图,并确定平行连杆23的安装长度、初始喷施姿态以及喷头24安装类型与数量。
(4)将施药模块2安装至农用无人机12上,安装系留线缆13,调试系留模块1与施药模块2,保证二者工作正常。
(5)农用无人机12自智能无人车11顶部起降平台起飞至橡胶林间指定初始喷施位置悬停,喷施控制处理器25伸展调节平行连杆23姿态,智能无人车11同时行进至农用无人机12下方。
(6)智能无人车11开始为农用无人机12的高空储药箱21供药,当药液量检测传感器211监测到药量达到高空储药箱量21容积的50%时,系留施药系统开始对橡胶树进行行间施药作业,环形气帘辅助施药器的外部圆环结构同步向下方喷气,形成气帘辅助施药。
(7)作业过程中,智能无人车11与农用无人机12同步在橡胶树行间行进,各传感器实时收集对应数据,并回传至控制模块4。
(8)控制模块4实时对回传的传感器数据信息进行分析处理,结合施药作业处方图及时修正智能无人车11与农用无人机12的行进作业参数,并根据地面沉积量采样分析传感器111评估的农药脱靶情况、农用无人机12周围的气流扰动情况以及橡胶树实际长势特点对喷施控制处理器25下达控制指令,精准调整微型雾化泵22的喷施压力以及平行连杆23的布置姿态,保证当下作业橡胶树冠层的最佳受药效果。
(9)橡胶树第一个行间喷作业结束后,施药模块2暂停工作,系留模块1移动行进至下一作业行间指定位置继续重复进行(5)至(8)步骤操作,直至作业任务结束。
上述为本发明较佳的实施方式,但本发明的实施方式并不受上述内容的限制,其他的任何未背离本发明的精神实质与原理下所做的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
- 一种系留式农用无人机橡胶树减飘施药系统及施药方法
- 一种系留式消防救援无人机系统