一种用于咳痰辅助的外骨骼机器人及控制方法
文献发布时间:2023-06-19 11:49:09
技术领域
本发明涉及软体外骨骼领域,特别是涉及一种用于咳痰辅助的外骨骼机器人及控制方法。
背景技术
目前,全世界有超过3百万的脊髓损伤患者(SCI),其中,北京大学第三医院危重医学科依托全国重点学科的北医三院脊柱外科团队年平均收治颈胸腰不同部位脊髓损伤患者80余例,其中,颈脊髓损伤约60余例。此类患者随着损伤节段升高,除表现为不同区域的感觉减弱或消失外,还会出现不同程度的肢体与躯干肌肉运动障碍。负责吸气与呼气的肌肉失去脊髓神经支配后会出现肌力减弱或丧失,吸气肌肌力下降可导致呼吸衰竭,呼气肌肉是参与咳嗽排痰过程的关键肌肉,一旦失神经支配,肌力下降,必然导致咳嗽能力被削弱。呼气肌肉群大部分由胸脊神经支配,颈脊髓损伤平面高于胸段脊髓,所以损伤后平面以下的呼气肌肉肌力均会有不同程度减低,由此造成患者咳嗽咳痰能力下降,气道廓清能力受损,呼吸道内痰液易于潴留,易引发肺部感染、肺不张等并发症,严重时甚至导致呼吸道梗阻,危及患者生命。为解决气道廓清的问题,患者常常需要气管切开,以便以人工辅助吸痰的方式排出气道内痰液。研究显示,代表脊髓完全损伤的ASIA A级被认为是气管切开的危险因素(Analysis ofthe risk factors for tracheostomy and decannulation aftertraumatic cervical spinal cord injury in an aging population.Spinal Cord 57,843–849(2019))。这也说明脊髓损伤越重,越需要气管切开。然而,气管切开在解决排痰问题的同时,因为其非生理性的方式也会带来种种弊端。气切之后不能说话,吞咽受损,妨碍患者与家人语言交流及经口进食,不但增加护理工作量,还易引发心理疾患,大大降低了生活质量。气切部位长期使用下也会发生导管脱出、软组织感染、气管扩张等一些列并发症,也给患者造成生命威胁。因而,如何以最近似生理的方式解决脊髓损伤患者,尤其是颈脊髓损伤患者的咳嗽排痰问题就成为临床上亟待解决的难题。此外,随着老龄化社会的到来,呼吸系统疾病是造成老年人疾病负担的主要健康问题。
因此,为了满足SCI患者以及老年人咳痰能力恢复以及呼吸功能康复锻炼的需求,亟需一种能够实现非侵入式、无创、便携、低成本且可居家使用的呼吸功能康复训练设备,满足辅助患者恢复咳痰能力以及加强呼吸功能锻炼的需求,使呼吸康复设备从ICU走向日常生活如居家旅游等。
发明内容
本发明的目的是提供一种用于咳痰辅助的外骨骼机器人及控制方法,实现待辅助用户无创、高效、智能辅助咳嗽的目标,满足待辅助用户恢复咳痰能力以及加强呼吸功能锻炼的需求。
为实现上述目的,本发明提供了如下方案:
一种用于咳痰辅助的外骨骼机器人,包括:呼吸传感器、正压模块、负压模块以及控制模块;
所述呼吸传感器用于获取待辅助用户的呼吸信号;所述呼吸信号包括:呼吸流速以及气道压力;
所述正压模块覆盖于所述待辅助用户的上腹部;
所述负压模块设置于所述待辅助用户的胸腔外壁,并包裹整个胸腔,且所述负压模块的外壳与所述待辅助用户的胸腔外壁之间形成密闭的腔体;所述密闭的腔体为负压腔;当所述待辅助用户有咳痰需求时,所述负压模块的外壳的刚度变大;当所述待辅助用户咳痰结束后,所述负压模块的外壳的刚度变小;
所述控制模块分别与所述呼吸传感器、所述正压模块以及所述负压模块连接;
所述控制模块用于根据所述呼吸信号判断所述待辅助用户是否为吸气状态;所述控制模块还用于当所述待辅助用户为吸气状态时,控制所述负压腔进行抽负压,在吸气结束之后控制所述负压模块直接与外界环境进行连通;所述控制模块还用于当所述待辅助用户为呼气状态时,控制所述正压模块进行充放气。
可选的,所述正压模块包括:软体驱动器以及限制绑带;
所述软体驱动器固定在所述限制绑带上,且所述软体驱动器覆盖于所述待辅助用户的上腹部,且朝向人体发生形变;
所述限制绑带用于将所述软体驱动器进行限位,且所述限制绑带的长度在所述软体驱动器的形变过程中保持不变;
所述限制绑带的拉伸刚度大于所述软体驱动器的阻抗。
可选的,所述软体驱动器为软体折纸单元、充气管或气囊。
可选的,所述控制模块包括:正压控制单元和负压控制单元;
所述正压控制单元用于控制所述软体驱动器的充放气时间和压强大小;
所述负压控制单元用于控制所述负压模块的外壳和所述负压腔的压强。
可选的,所述正压控制单元包括:正压泵、正压调压阀、正压开关阀、第一负压开关阀以及第一控制器;
所述正压泵、所述正压调压阀、所述正压开关阀以及所述第一负压开关阀均与所述第一控制器连接;所述正压开关阀以及所述第一负压开关阀均与所述软体驱动器连通。
可选的,所述负压控制单元包括:真空泵、第一负压调压阀、第二负压开关阀、第二负压调压阀、第三负压开关阀以及第二控制器;
所述真空泵通过所述第一负压调压阀、以及所述第二负压开关阀与所述负压模块的外壳连通;
所述真空泵通过所述第二负压调压阀以及所述第二负压开关阀与所述负压腔连通;
所述真空泵、所述第一负压调压阀、所述第二负压开关阀、所述第二负压调压阀以及所述第三负压开关阀均与所述第二控制器连接。
可选的,所述负压模块的外壳为层阻塞变刚度结构。
一种用于咳痰辅助的外骨骼机器人的控制方法,用于实现所述的一种用于咳痰辅助的外骨骼机器人,包括:
获取待辅助用户的呼吸信号;所述呼吸信号包括:呼吸流速以及气道压力;
根据所述呼吸信号判断待辅助用户是否为吸气状态;
若所述待辅助用户为吸气状态,则控制负压模块的外壳进行抽负压,之后控制负压腔进行抽负压,在吸气结束后并控制所述负压腔直接与外界环境进行连通;
若所述待辅助用户为呼气状态,则控制所述正压模块进行充放气。
若所述待辅助用户结束咳痰,则控制所述负压模块的外壳直接与外界环境连通。
根据本发明提供的具体实施例,本发明公开了以下技术效果:
本发明所提供的一种用于咳痰辅助的外骨骼机器人及控制方法,该机器人包括呼吸传感器、正压模块、负压模块以及控制模块。根据待辅助用户的呼吸信号来触发不同工作模块,进而辅助待辅助用户进行自主咳痰。当所述待辅助用户为吸气状态时,所述负压模块的外壳的刚度变大,满足负压腔的压强要求;且负压腔进行间歇性抽负压,使待辅助用户的胸腔容积增大,辅助患者吸气;当所述待辅助用户为呼气状态时,控制所述正压模块进行充气,对待辅助用户的腹部施加冲击力,使待辅助用户的肺部体积瞬间收缩,在一定范围内提高呼出气量,加快呼吸道流速,通过控制外骨骼机器人正负压模块实现相应的动作对患者的不同呼吸相位提供呼吸支持,实现待辅助用户呼吸道气流压力和流速的控制,进而辅助待辅助用户触发有效的咳嗽来清除气道分泌物,实现高效、无创、智能咳痰。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
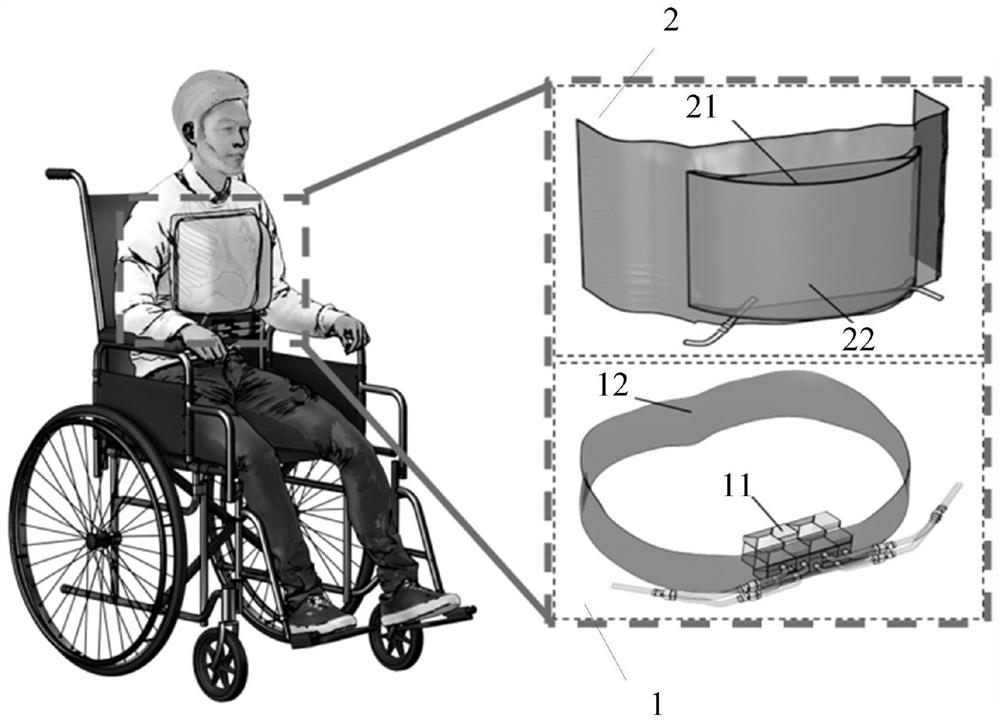
图1为本发明所提供的一种用于咳痰辅助的外骨骼机器人结构示意图;
图2为本发明所提供的软体折纸单元的变形模式示意图;
图3为本发明所提供的正压模块阻抗匹配示意图;
图4为本发明所提供的负压模块示意图;
图5为本发明所提供的负压模块具体实施例中的示意图;
图6为本发明所提供的一种用于咳痰辅助的外骨骼机器人控制方法示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种用于咳痰辅助的外骨骼机器人及控制方法,实现待辅助用户无创、高效、智能辅助咳嗽的目标,满足待辅助用户恢复咳痰能力以及加强呼吸功能锻炼的需求。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
图1为本发明所提供的一种用于咳痰辅助的外骨骼机器人结构示意图,如图1所示,本发明所提供的一种用于咳痰辅助的外骨骼机器人,包括:呼吸传感器、正压模块1、负压模块2以及控制模块。
所述呼吸传感器用于获取待辅助用户的呼吸信号;所述呼吸信号包括:呼吸流速以及气道压力。
所述正压模块1覆盖于所述待辅助用户的上腹部。即所述正压模块1覆盖于剑突和肚脐连线的中线位置。
所述负压模块2设置于所述待辅助用户的胸腔外壁,并包裹整个胸腔,且所述负压模块的外壳21与所述待辅助用户的胸腔外壁之间形成密闭的腔体;所述密闭的腔体为负压腔22;当所述待辅助用户有咳痰需求时,所述负压模块的外壳21的刚度变大;当所述待辅助用户咳痰结束后,,所述负压模块的外壳21的刚度变小。即非工作状态像一件衣服一样可以轻便、舒适的穿戴在身上;当处于工作状态改变自身刚度,满足负压腔22的压强要求。
所述控制模块分别与所述呼吸传感器、所述正压模块1以及所述负压模块2连接。
所述控制模块用于根据所述呼吸信号判断所述待辅助用户是否为吸气状态;所述控制模块还用于当所述待辅助用户为吸气状态时,控制所述负压腔22进行间歇性抽负压在吸气末并控制所述负压模块2直接与外界环境进行连通;所述控制模块还用于当所述待辅助用户为呼气状态时,控制所述正压模块1进行快速充放气。
作为一个具体的实施例,所述所述负压模块的外壳21为层阻塞变刚度结构;所述所述负压模块的外壳21也可采用颗粒物阻塞变刚度的原理、磁流变液或者智能材料(如温控可变刚度水凝胶、记忆高聚物等)。
即通过控制负压腔22压强,进而增大人体肺部的容积,起到辅助吸气的效果。当所述负压模块的外壳21为层阻塞外壳时,可以在外骨骼机器人工作状态通过抽真空保持坚硬的形态以保证负压腔22的容积,在非工作状态保持柔软的状态以提高外骨骼机器人的穿戴舒适性。
所述负压模块的外壳21为层阻塞外壳,即采用层阻塞的原理,将两层砂纸颗粒朝外堆叠,用加厚透明尼龙对其进行塑封,外壳两侧真的支撑结构进一步提升外壳的弯曲刚度。
如图4和图5所示,当层阻塞外壳处于自由状态下时,其弯曲刚度较小,在集中力作用下外壳发生较大的变形;通过对层阻塞外壳抽真空,层与层之间的摩擦力在压强作用下急剧增大,进而外壳的弯曲刚度增大,在相同载荷下保持形状不塌陷
具体的采用密封材料使负压模块的外壳21与所述待辅助用户的胸腔外壁贴合。所述密封材料采用医用压敏胶带进行密封,也可采用别的吸附方式如章鱼触手启发的负压吸附、壁虎触手启发的吸附方式,或印鱼启发的吸附方式等进行密封。
在吸气相,首先对层阻塞刚度外壳进行抽真空,增大其抗弯刚度;然后对负压腔22进行抽真空,使其在胸壁周围产生间歇性负压,负压腔22与人体胸腔的压差使人体胸腔产生有节律的扩张,进而提高吸入气量,达到辅助吸气的目的。
所述正压模块1包括:软体驱动器11以及限制绑带12。
所述软体驱动器11固定在所述限制绑带12上,且所述软体驱动器11覆盖于所述待辅助用户的上腹部,且朝向人体发生形变。所述软体驱动器11采用可拉伸的软体材料。
作为一个具体的实施例,所述软体驱动器11为软体折纸单元、充气管或气囊。
当所述软体驱动器11为软体折纸单元时,采用吉村折纸管的结构形式但不限于此。
如图2所示,当所述软体驱动器11为软体折纸单元时,软体折纸单元经历“展开”和“拉伸”的双模变形;软体折纸单元在未充气时处于收缩状态,待辅助用户可以方便的穿戴在身上;在充气状态,软体折纸单元体积膨胀,限制带不可拉伸且保持长度不变,因此折纸单元仅能朝人体方向膨胀,进而对腹部起到“冲击”和“挤压”作用,辅助患者充分呼气。
所述限制绑带12用于将所述软体驱动器11进行限位,且所述限制绑带12的长度在所述软体驱动器11的形变过程中保持不变。即所述限制绑带12不可拉伸且保持长度不变,因此折纸单元仅能朝人体方向膨胀,进而对腹部起到“冲击”和“挤压”作用,辅助患者充分呼气。
如图3所示,所述限制绑带12的拉伸刚度大于所述软体驱动器11的阻抗。
所述控制模块包括:正压控制单元和负压控制单元。
所述正压控制单元用于控制所述软体驱动器11的充放气时间和压强大小;
所述负压控制单元用于控制所述负压模块的外壳21和所述负压腔22的压强。
所述正压控制单元包括:正压泵、正压调压阀、正压开关阀、第一负压开关阀以及第一控制器。
所述正压泵、所述正压调压阀、所述正压开关阀以及所述第一负压开关阀均与所述第一控制器连接;所述正压开关阀以及所述第一负压开关阀均与所述软体驱动器11连通。
所述正压泵用于提供气源;正压调压阀用于调节输出压力大小;正压开关阀用于控制气路的开关;并且为了实现快速放气,设置所述第一负压开关阀,所述第一负压开关阀用于辅助折纸单元快速放气,保持压缩状态。
并且,为了方便显示当前压强,所述正压控制单元还包括智能数字压力表。
软体折纸单元的输出力和时间响应的快速性与软体折纸单元内部的压强有关,可通过正压调压阀进行控制。通过设置调压阀控制输出压强,实现软体折纸单元输出力可调,适用于不同腹部顺应性的待辅助用户进行使用。此外,为了保证安全性以及使用过程的舒适性,设有最大输出压强限制,当软体折纸单元内部的压强超过所限定的最大压强值时,正压开关阀会自动关闭,防止软体折纸单元内部压强过大产生极限变形甚至爆破,保证使用过程的安全性。
所述负压控制单元包括:真空泵、第一负压调压阀、第二负压开关阀、第二负压调压阀、第三负压开关阀以及第二控制器。
所述真空泵通过所述第一负压调压阀、以及所述第二负压开关阀与所述负压模块的外壳21连通。
所述真空泵通过所述第二负压调压阀以及所述第二负压开关阀与所述负压腔22连通。
所述真空泵、所述第一负压调压阀、所述第二负压开关阀、所述第二负压调压阀以及所述第三负压开关阀均与所述第二控制器连接。
由真空泵提供负压,负压调压阀调节负压压强,第二负压开关阀进而第三控制气路的开关。
作为一个具体的实施例,所述第一控制器和所述第二控制器均为单片机,即用单片机对正负压控制模块的开关阀进行控制。正压开关阀通过阀的开关实现对软体折纸单元充气时间、压强以及输出力的控制;负压开关阀通过阀的开关实现对层阻塞硬度和负压腔22压强的控制。通过正负压调压阀控制软体折纸单元和负压腔22的压强,实现外骨骼机器人辅助效果的调控,通过单片机对正压开关阀和负压开关阀的控制时间的设置,可以实现正负压模块2时序化动作,通过设置循环次数,实现外骨骼机器人辅助咳痰的呼吸周期数,最终实现机器人辅助作用下模拟自然咳嗽过程人体气道内气流的动态特征。
负压腔22的压强由负压调压阀进行控制,通过负压腔22的压强,可对不同胸腔顺应性的患者进行吸气辅助;此外,为了保证吸气辅助的安全性以及防止压强过大产生的不适感和皮肤损伤,设有最大负压压强阈值,当负压腔22压强超过所限定的负压范围时,负压开关阀自动关闭,保证使用过程的舒适性。
图6为本发明所提供的一种用于咳痰辅助的外骨骼机器人控制方法示意图,如图6所示,本发明所提供的一种用于咳痰辅助的外骨骼机器人的控制方法,用于实现所述的一种用于咳痰辅助的外骨骼机器人,包括:
S101,获取待辅助用户的呼吸信号;所述呼吸信号包括:呼吸流速以及气道压力;
S102,根据所述呼吸信号判断待辅助用户呼吸状态;
S103,若所述待辅助用户为吸气状态,则控制负压模块的外壳21进行抽负压,之后控制负压腔22进行抽负压,并在吸气末控制所述负压模块2直接与外界环境进行连通;
S104,若所述待辅助用户为呼气状态,则控制所述正压模块1进行快速充放气;
若所述待辅助用户结束咳痰,则控制所述负压模块2的外壳直接与外界环境连通。
本发明采用软体机器人技术,正压模块1采用了软体折纸单元,负压模块2采用了可变刚度驱动原理。在吸气相,通过控制负压腔22压强辅助人体胸腔体积的扩张,在呼气相,利用软体折纸单元对患者腹部产生冲击力,辅助膈肌快速上移进而减小胸腔体积。不论是吸气相还是呼气相,均采用体外辅助的方式,实现患者呼吸道气流压力和流速的控制,进而辅助患者触发有效的咳嗽来清除气道分泌物。该方法没有破坏人体胸腔自然的负压状态,与传统的气管切开和机械吸呼式等排痰方法相比而言,辅助方式更符合人的生理且几乎无任何副作用,同时避免了一系列的副作用如气管感染、肺泡塌陷以及呼吸功能恶化等等,使咳痰辅助从ICU走进日常生活。
咳痰辅助外骨骼机器人采用软体驱动器11(软体折纸单元)和可变刚度外壳,相较于传统的刚性外骨骼,提高了穿戴的舒适性和安全性。
咳痰辅助外骨骼机器人具有体积可变和刚度可变的特性,实现了性能与便携兼顾。体积可变的优点主要来源于软体驱动器11采用了折纸单元结构,在未充气时时处于收缩状态,患者可以方便的穿戴在身上;在充气状态,软体折纸单元体积膨胀,可以有效的对腹部产生“冲击”和“挤压”作用。刚度可变的优势主要来源于负压模块2采用层阻塞原理实现刚度变化,安全可靠且变化速度快。在机器人不工作状态,层阻塞外壳足够柔软,其阻抗小于人体阻抗,进而提高穿戴舒适性;在机器人工作状态,通过控制真空压强提高外壳刚度。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 一种用于咳痰辅助的外骨骼机器人及控制方法
- 一种用于外骨骼机器人的智能辅助支架