一种高稳定性结构表面检查装置
文献发布时间:2023-06-19 11:49:09
技术领域
本发明涉及工程结构检查领域,尤其是涉及一种高稳定性结构表面检查装置。
背景技术
大量工程结构投入运营后,在荷载和环境的长期作用下,会出现结构耐久性退化,表现为多种耐久性病害,并在结构表面有所反应,如不及时检查和维修,甚至会发生危及结构安全的事故。为维持结构良好的服役性能,防止安全事故发生,有必要定期对工程结构进行必要的检查和评估,充分了解结构的实际情况。
以桥梁为例,除少数在建造时预留底部通道的桥梁以外,大部分的山区、跨海大桥的桥底表观检查检查采用吊篮式或桁架式桥梁检查检查车进行,即由液压系统将工作臂弯曲深入到桥底对桥梁进行检查。对城市高架,桥底表观检查常采用在地面架设配备长焦镜头的照相机进行。采用桥梁检查车进行检查的方法,除去车辆本身成本高昂的问题以外,液压系统工作速度较慢,检查人员到达指定位置时间长,液压臂遇到桥面两侧灯柱、指示牌等障碍物时,必须收起后重新展开,检查效率低下;采用长焦镜头进行拍摄,成本较低,但拍摄视场角小,瞄准难度大,且必须有架设相机位置。这些方式检查不便并且耗费人力物力。上述情况在大型空间结构屋面等类似工程结构检查场景中也具有现实的需求。
CN207141381U公开了一种桥底检测多翼无人机,包含无人机主体支架、三轴增稳云台、工作摄像镜头、两个大螺旋桨、四个小螺旋桨和避障模块,三轴增稳云台设置在无人机主体支架上,工作摄像镜头设置在三轴增稳云台上。该技术方案中的桥底检测多翼无人机在工作时,因为螺旋桨悬浮的缺陷,难以实现稳定的悬浮或滞空,使得获取的视觉信息质量较差。
CN211139645U公开了一种氦气球无人机,包括氦气球及设置在所述氦气球下部中央的起落架,所述起落架上设置有检测云台和飞行控制器;所述氦气球包括氦气球本体,所述氦气球本体上设置有若干上下向的通孔,且各通孔内均设置有无刷电机和桨叶的组合件,所述氦气球本体的上表后部设置有尾翼气囊、左右部分别设置有侧翼气囊,所述氦气球本体的下表设置有四个起落气囊,所述氦气球本体与各气囊之间分别设置有气阀。该技术方案中无法实现桥底面病害的稳定图像信息获取,同时尾翼气囊的设计难以实现精确地体积形态调节,进一步导致了无人机平台滞空稳定性的缺陷。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种高稳定性结构表面检查装置,通过悬浮主体、行走组件、螺旋翼的相互配合构成了一个稳定的悬浮检测平台,并构成了高稳定性结构表面行走结构,为检查组件创造了最优化的工作平台。
本发明的目的可以通过以下技术方案来实现:
本技术方案中高稳定性结构表面检查装置包括:
悬浮主体,为能够逆重力上升或滞空的漂浮体,所述悬浮主体上贯穿设有气流通道孔;
第一螺旋翼,设于所述气流通道孔中,以此实现悬浮主体的竖直拉升和下降;
检查组件,包括设于所述悬浮主体上的多个检查元件,获取结构表面病害的视觉信息;
行走组件,设于悬浮主体上表面,能够与结构下表面抵接,并使得悬浮主体沿结构表面的下表面进行位移,以此辅助检查组件获取结构表面的病害信息。
进一步地,所述高稳定性结构表面检查装置还包括第二螺旋翼,所述第二螺旋翼与设于悬浮主体上的第二伺服电机传动连接,所述第二螺旋翼设于悬浮主体上,以此实现悬浮主体的水平位置调整。
进一步地,所述气流通道孔垂向开设于所述悬浮主体上。
进一步地,所述检查元件包括摄像单元、热成像、超声雷达、混凝土回弹仪中的一种或多种的组合。
进一步地,所述高稳定性结构表面检查装置还包括第一伺服电机,所述第一伺服电机与所述第一螺旋翼传动连接。
进一步地,所述悬浮主体上设有所述锚固孔中设有连接器母端,所述连接器母端与悬浮主体电连接,实现悬浮主体中有源元件的供电;
连接器母端并与第一伺服电机、第二伺服电机、检查组件、行走组件的构成有线通信连接;
所述连接器母端能够通过带有连接器公端的线路快速连接,实现用户端的有线辅助控制及供电。
进一步地,所述行走组件包括设于悬浮主体上表面的滑轮阵列,所述滑轮阵列由多个滑轮单元构成,其中一个或多个滑轮匹配有驱动电机。
进一步地,所述悬浮主体由多个悬浮单元可拆卸拼接而成,适应检查元件数量及外部框架载重的匹配;
进一步地,所述悬浮主体上还设有辅助连杆,所述检查元件可拆卸连接于辅助连杆上,辅助连杆可以进行延续性拼接,相邻两节间也可以实现特定角度的转动,以此通过多种调节形式配合检查元件实现特定位置的结构表面信息获取。
作为本技术方案中的另一种实施方式,所述行走组件还包括顶部框架结构,所述滑轮阵列设于所述顶部框架结构上。
进一步地,悬浮主体上部设有可与结构表面契合的框架及走行系统,可根据结构表面具体情况伸缩展或行走,以便达到拍摄定距的标准化影像。
进一步地,所述悬浮主体为热力式悬浮体或充气式悬浮体。
进一步地,所述充气式悬浮体为氦气填充型。
进一步地,所述热力式悬浮体包括加热器和热气载体。
进一步地,所述悬浮主体上还设有GPS模块、避障模块、无线信号收发模块、蓄电池。
进一步地,所述悬浮主体上还设有微处理器,所述微处理器分别与所述第一螺旋翼、检查组件、行走组件、GPS模块、避障模块、无线信号收发模块电连接。
进一步地,所述避障模块为红外传感器、激光雷达、超声传感器中的一种或多种的组合。
进一步地,所述GPS模块为多频GPS定位模块。
与现有技术相比,本发明具有以下技术优势:
1)本技术方案中的高稳定性结构表面检查装置通过悬浮主体、行走组件、螺旋翼的相互配合构成了一个稳定的悬浮检测平台,并构成了高稳定性结构表面行走结构,为检查组件创造了最优化的工作平台,避免了扰动、振动、晃动等多种不稳定因素,能够根据结构表面具体情况伸缩展或行走,以便达到检查模块中测试仪器与测试对象对工作空间姿态和位置的要求。
2)本技术方案中的高稳定性结构表面检查装置可以实现长时间静止滞空,解决了传统无人机因为滞空时间短、拍摄不清晰、结构表面无法实现通讯而无法实现定距的标准化的拍摄,本技术方案能够同时搭载多种检查设备为结构检查提供可靠稳定平台。
3)本技术方案中避免了在无线信号受到干扰或屏蔽区域的作业困难,在悬浮主体上设有锚固孔中设有连接器母端,连接器母端与悬浮主体电连接,实现悬浮主体中有源元件的供电,连接器母端并与第一伺服电机、第二伺服电机、检查组件、行走组件的构成有线通信连接,连接器母端能够通过带有连接器公端的线路快速连接,实现用户端的有线辅助控制及供电。
4)本技术方案中的悬浮主体上还设有辅助连杆,所述检查元件可拆卸连接于辅助连杆上,辅助连杆可以进行延续性拼接,相邻两节间也可以实现特定角度的转动,以此通过多种调节形式配合检查元件实现特定位置的结构表面病害信息获取,本技术方案中的辅助连杆能够实现多功能仪器与平台连接,适应多场景检查需求。
附图说明
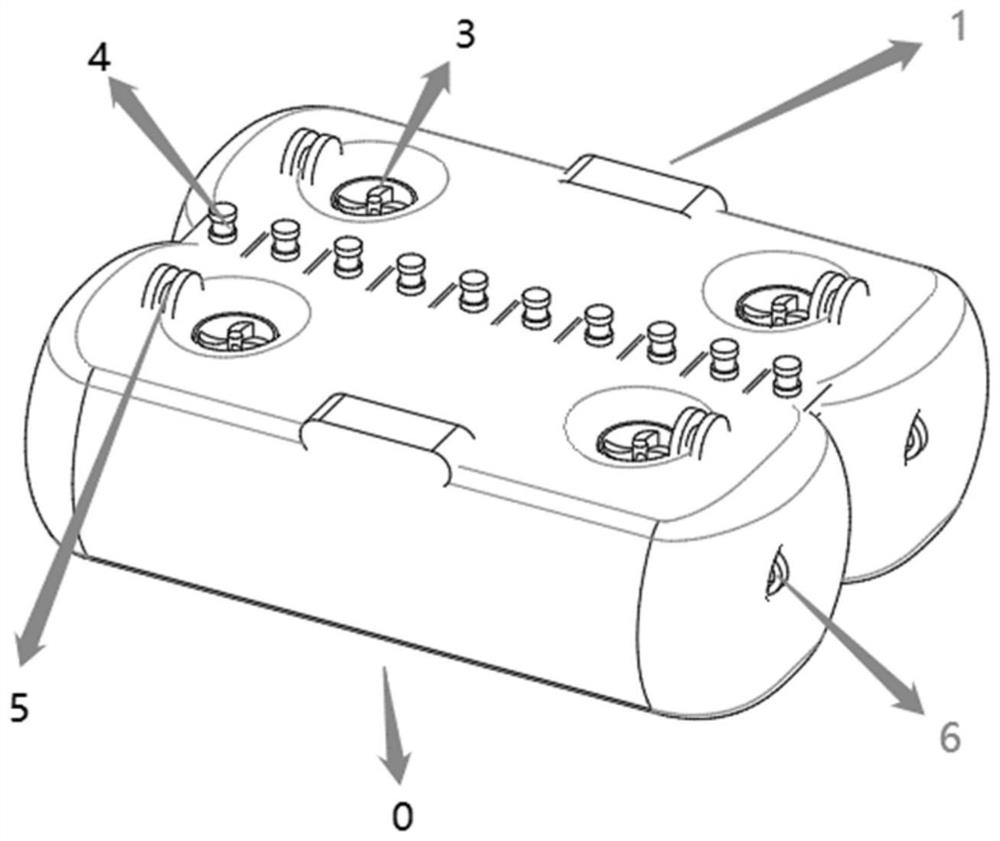
图1为本技术方案中高稳定性结构表面检查装置的上部结构示意图;
图2为本技术方案中高稳定性结构表面检查装置的下部结构示意图;
图中:0、悬浮主体,1、避障模块,2、气流通道孔,3、第一螺旋翼,4、检查组件,5、行走组件,6、锚固孔,7、微处理器。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。
实施例1
本技术方案中高稳定性结构表面检查装置包括悬浮主体0、第一螺旋翼3、检查组件4、第二螺旋翼、行走组件5、微处理器7,参见图1和图2。
悬浮主体0是能够逆重力上升或滞空的漂浮体,所述悬浮主体0上贯穿设有气流通道孔2。本技术方案中的高稳定性结构表面检查装置可以实现长时间静止滞空,解决了传统无人机因为滞空时间短、拍摄不清晰、结构下底面无法实现通讯而无法实现定距的标准化的拍摄的弊病,本技术方案能够同时搭载多种检查设备为结构表面检查提供可靠稳定平台。
检查组件4设于所述悬浮主体0上,获取结构表面病害的视觉信息,具体实施时,包括设于所述悬浮主体0上的多个检查元件,获取结构表面病害的视觉信息;检查组件4选用现有的阵列式摄像单元、热成像、超声雷达、混凝土回弹仪中的一种或多种的组合即可。
行走组件5设于悬浮主体0上表面,能够与结构下表面抵接,并使得悬浮主体0沿结构下表面进行位移,以此辅助检查组件4获取结构表面的病害信息。行走组件5包括设于悬浮主体0上表面的滑轮阵列,所述滑轮阵列由多个滑轮单元构成,其中一个或多个滑轮匹配有驱动电机。具体实施时,其中至少一个滑轮为可转动换轮,可转动换轮能够实现多方向的旋转,同时匹配有舵机,直接接受微处理器的指令。
第一螺旋翼3设于所述气流通道孔2中,以此实现悬浮主体0的竖直拉升和下降。高稳定性结构表面检查装置还包括第二螺旋翼,所述第二螺旋翼与设于悬浮主体0上的第二伺服电机传动连接,第二螺旋翼设于悬浮主体0上,以此实现悬浮主体0的水平位置调整。气流通道孔2垂向开设于所述悬浮主体0上。高稳定性结构表面检查装置还包括第一伺服电机,所述第一伺服电机与所述第一螺旋翼3传动连接。悬浮主体0上设有锚固孔6,所述锚固孔6中设有连接器母端,所述连接器母端与悬浮主体0电连接,实现悬浮主体0中有源元件的供电,连接器母端并与第一伺服电机、第二伺服电机、检查组件4、行走组件5的构成有线通信连接。连接器母端能够通过带有连接器公端的线路快速连接,实现用户端的有线辅助控制及供电,避免了在无线信号受到干扰或屏蔽区域的作业困难。
具体实施时,以桥梁为例,悬浮主体0上部设有可与桥底箱梁契合的框架及走行系统。高稳定性结构表面检查装置通过悬浮主体0、行走组件5、螺旋翼的相互配合构成了一个稳定的悬浮桥检平台,并构成了高稳定性结构表面行走结构,为检查组件4创造了最优化的工作平台,能够根据桥底具体情况伸缩展或行走,以便检查组件4达到拍摄定距的标准化影像。
本技术方案中的悬浮主体0上还设有辅助连杆,所述检查元件可拆卸连接于辅助连杆上,辅助连杆可以进行延续性拼接,相邻两节间也可以实现特定角度的转动,以此通过多种调节形式配合检查元件实现特定位置的结构表面病害信息获取,本技术方案中的辅助连杆能够实现多功能仪器与平台连接,适应多场景检查需求。
具体实施时,悬浮主体0为热力式悬浮体或充气式悬浮体。
当具体选用充气式悬浮体时,充气式悬浮体为氦气填充型。
当具体选用热力式悬浮体时,热力式悬浮体包括加热器和热气载体,此种结构原理与热气球相同。
悬浮主体0上还设有GPS模块、避障模块1、无线信号收发模块、蓄电池。悬浮主体0上还设有微处理器7,所述微处理器7分别与所述第一螺旋翼3、检查组件4、行走组件5、GPS模块、避障模块1、无线信号收发模块电连接。具体实施时,避障模块1为红外传感器、激光雷达、超声传感器中的一种或多种的组合,GPS模块为多频GPS定位模块。微处理可为ARM架构、x86架构或较简单架构的处理器种类,只要能满足本技术方案中的逻辑处理和计算过程即可。
本实施例中的微处理器7还匹配有RAM和ROM,其中ROM中预存有避障算法、路径规划算法、各伺服电机/舵机/驱动电机的速度控制程序。
实施例2
作为本技术方案中的另一种实施方式,所述行走组件5还包括顶部框架结构,所述滑轮阵列设于所述顶部框架结构上,在本技术方案中,悬浮主体0的形态结构没有限制,仅需通过顶部框架及滑轮实现与结构表面的下表面的适应性贴合即可,其中悬浮主体0由多个悬浮单元可拆卸拼接而成,适应检查元件数量及外部框架载重的匹配。
上述的对实施例的描述是为便于该技术领域的普通技术人员能理解和使用发明。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本发明不限于上述实施例,本领域技术人员根据本发明的揭示,不脱离本发明范畴所做出的改进和修改都应该在本发明的保护范围之内。
- 一种高稳定性结构表面检查装置
- 表面图象读出装置和三维结构的表面检查