一种基于TOF相机的自动倒车上挂系统及方法
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及无人驾驶技术领域,特别涉及一种基于TOF相机的自动倒车上挂系统及方法。
背景技术
随着无人驾驶系统的逐步产业化落地,厂区无人物流、港口无人物流、矿区无人物流逐渐兴起。无人化运输逐渐成为这些领域的运营常态,其中,无人物流的定义即曾经需要人类驾驶司机进行驾驶实施的厂区物流、港口物流和矿区物流转变为无人驾驶车辆为主的无人化的物流运输。
但是,目前的无人驾驶物流运输,其无人化程度集中于运输端,无人驾驶基本集中在所有车辆设备准备完成后,即车辆在道路上的无人驾驶运输,在站点或者作业点还无法实现真正的无人化,带来无人车辆使用的不便。尤其是无人物流拖车的拖挂上挂上钩操作,一直没有能实现完全的无人化运营,用户体验有待提高。
发明内容
本发明针对上述现有技术中存在的问题,提出一种基于TOF相机的自动倒车上挂系统及方法,可以实现无人驾驶车自动和货物拖挂进行对接,从而实现无人驾驶车的全流程运营,降低工业生产运输成本。
为解决上述技术问题,本发明是通过如下技术方案实现的:
本发明提供一种基于TOF相机的自动倒车上挂系统,其包括:无人车、后视TOF相机、连接检测装置以及主控装置;其中,
所述后视TOF相机设置于所述无人车的后方,用于实现后视深度图像的采集,并将采集到的所述后视深度图像信号传输给所述主控装置;
所述连接检测装置设置于所述待拖挂车辆的待拖挂位置和/或无人车的拖挂位置,用于实现连接检测,并将所述连接检测信号传输给所述主控装置;
所述主控装置用于接收所述后视深度图像信号以及所述连接检测信号,并根据所述后视深度图像信号来识别待拖挂以及拖挂的位置,设定所述无人车的倒车路径,以实现所述无人车的倒车促使待拖挂车辆的待拖挂以及无人车的拖挂进行自动连接;还用于根据所述连接检测信号识别待拖挂与拖挂是否连接成功。
较佳地,所述连接检测装置为机械碰撞装置,用于实现机械碰撞检测。
较佳地,所述机械碰撞装置为机械开关传感器,在所述待拖挂与拖挂未连接成功时,所述机械碰撞检测信号为0,在所述待拖挂与拖挂连接成功时,所述机械碰撞检测信号为1。
较佳地,所述连接检测装置为压力检测装置,用于实现压力检测,在所述待拖挂与拖挂未连接成功时,所述压力检测信号小于预设值,在所述待拖挂与拖挂连接成功时,所述压力检测信号大于等于预设值。
较佳地,所述无人车的初始位置在所述待拖挂车的左前方或右前方。
较佳地,在第一次倒车拖挂连接不成功的情况下,所述主控装置还用于控制所述无人车的前进,以实现多次重复前进倒车进行拖挂连接。
较佳地,所述待拖挂车辆的待拖挂位置和/或无人车的拖挂位置还设置有编码器,用于检测所述待拖挂车辆与无人车的相对位姿,并将相对位姿信号传输给所述主控装置;进一步地,
所述主控装置用于根据所述后视深度图像信号以及所述相对位姿信号,设定所述无人车的倒车路径。
较佳地,所述待拖挂车辆的待拖挂位置和/或无人车的拖挂位置还设置有标志,用于通过所述标志缩小所述待拖挂位置和/或拖挂位置的检测范围。
较佳地,还包括:通信单元,其用于将上挂的信息上传给云端的系统,从而让全系统共享目前的正在实际运营的无人物流车的情况,保证整个系统的高效运营。
本发明还提供一种基于TOF相机的自动倒车上挂方法,其包括以下步骤:
S91:通过TOF相机采集无人机后方的后视深度图像;
S92:根据所述后视深度图像信号来识别待拖挂以及拖挂的位置,进而设定所述无人车的倒车路径,以实现所述无人车的倒车促使待拖挂车辆的待拖挂以及无人车的拖挂进行自动连接;
S93:检测所述待拖挂车辆的待拖挂与所述无人机的拖挂之间是否连接成功。
较佳地,所述S93之后还包括:
S101:当所述待拖挂与所述拖挂之间未连接成功时,控制所述无人车前进,以实现多次重复前进倒车进行拖挂连接。
较佳地,所述S93进一步为:通过机械碰撞信号和/或压力信号来检测所述待拖挂车辆的待拖挂与所述无人机的拖挂之间是否连接。
较佳地,还包括:将上挂的信息上传给云端的系统,从而让全系统共享目前的正在实际运营的无人物流车的情况,保证整个系统的高效运营。
上述基于TOF相机的自动倒车上挂系统及方法的应用场景广泛,可以用于小型物流场景,比如工厂、园区、机场的物流场景;还可以用于大型物流场景,比如矿区的运输场景。
相较于现有技术,本发明实施例具有以下至少一种优点:
(1)本发明提供的基于TOF相机的自动倒车上挂系统及方法,通过后视TOF相机、连接检测装置以及主控装置,实现了完全的无人化运营,用户体验大大提升;并且通过将上钩的流程无人化,将工厂的安全性进一步提高,保障作业工人的安全;
(2)本发明提供的基于TOF相机的自动倒车上挂系统及方法,通过后视TOF相机实现拖挂的检测和跟踪,可以同时处理白天和夜晚的情况,实现了全天候的运营;
(3)本发明提供的基于TOF相机的自动倒车上挂系统及方法,通过往复性的路径规划,保证自动拖挂在失败上挂的情况下能重新进行路径规划,进行拖挂的再次上挂;
(4)本发明提供的基于TOF相机的自动倒车上挂系统及方法,通过将上挂的信息上传给云端的系统,从而让全系统共享目前的正在实际运营的无人物流车的情况,保证整个系统的高效运营。
附图说明
下面结合附图对本发明的实施方式作进一步说明:
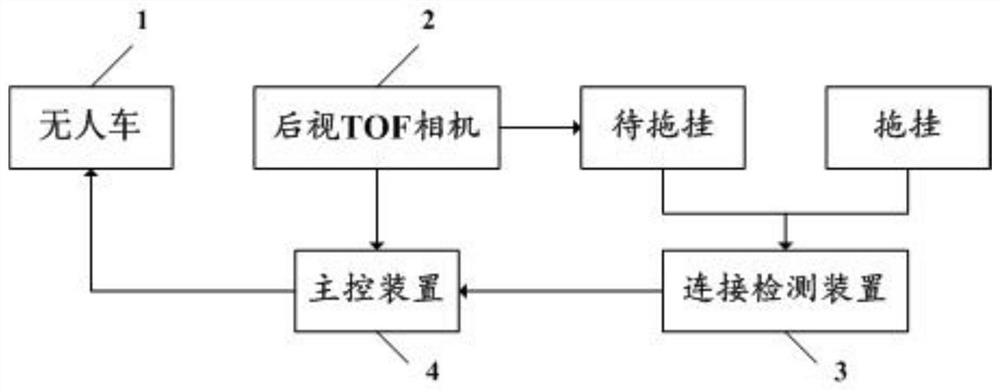
图1为本发明一实施例的基于TOF相机的自动倒车上挂系统的结构示意图;
图2为本发明一实施例的基于TOF相机的自动倒车上挂方法的流程图。
标号说明:1-无人车,2-后视TOF相机,3-连接检测装置,4-主控装置。
具体实施方式
下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
如图1所示为本发明一实施例的基于TOF相机的自动倒车上挂系统的结构示意图。
请参考图1,本实施例的自动倒车上挂系统包括:无人车1、后视TOF相机2、连接检测装置3以及主控装置4。其中,后视TOF相机2设置于无人车1的后方,用于实现后视深度图像的采集,并将采集到的后视深度图像信号传输给主控装置4。连接检测装置3设置于待拖挂车辆的待拖挂位置和/或无人车的拖挂位置,用于实现连接检测,并将连接检测信号传输给主控装置4。主控装置4用于接收后视深度图像信号以及连接检测信号,并根据后视深度图像信号来识别待拖挂以及拖挂的位置,设定无人车的倒车路径,以实现无人车的倒车促使待拖挂车辆的待拖挂以及无人车的拖挂进行自动连接;还用于根据连接检测信号识别待拖挂与拖挂是否连接成功。
本实施例通过后视TOF相机、连接检测装置以及主控装置,实现了完全的无人化运营,用户体验大大提升;并且通过将上钩的流程无人化,将工厂的安全性进一步提高,保障作业工人的安全。通过后视TOF相机实现拖挂的检测和跟踪,可以同时处理白天和夜晚的情况,实现了全天候的运营。
较佳实施例中,连接检测装置为机械碰撞装置,用于实现机械碰撞检测。进一步地,机械碰撞装置可以为机械开关传感器,在所述待拖挂与拖挂未连接成功时,所述机械碰撞检测信号为0,在所述待拖挂与拖挂连接成功时,所述机械碰撞检测信号为1。
另一实施例中,连接检测装置也可以为压力检测装置,用于实现压力检测,在待拖挂与拖挂未连接成功时,压力检测信号小于预设值,在待拖挂与拖挂连接成功时,压力检测信号大于等于预设值。
较佳实施例中,无人车的初始位置在待拖挂车的左前方或右前方,从而能够使TOF相机可视待拖挂车辆位置。
较佳实施例中,在第一次倒车拖挂连接不成功的情况下,主控装置还用于控制无人车的前进,以实现多次重复前进倒车进行拖挂连接。进一步的,通过往复性的路径规划,保证自动拖挂在失败上挂的情况下能重新进行路径规划,进行拖挂的再次上挂。
较佳实施例中,待拖挂车辆的待拖挂位置和/或无人车的拖挂位置还设置有编码器,编码器设置于待拖挂和/或拖挂的主轴上,用于检测待拖挂车辆与无人车的相对位姿,并将相对位姿信号传输给主控装置;进一步地,主控装置用于根据后视深度图像信号以及相对位姿信号,设定无人车的倒车路径。
较佳实施例中,待拖挂车辆的待拖挂位置和/或无人车的拖挂位置还设置有标志,如:反光标签或颜色鲜艳的标签,用于缩小待拖挂位置和/或拖挂位置的检测范围,从而提升检测的准确率。
较佳实施例中,还包括:通信单元,其用于将上挂的信息上传给云端的系统,从而让全系统共享目前的正在实际运营的无人物流车的情况,保证整个系统的高效运营。
不同实施例中,待拖挂车辆的待拖挂与无人车的拖挂可以采用挂钩的形式;或者,也可以采用其他的连接方式,如:磁性连接、压力连接等。进一步地,当采用挂钩形式时,当到达待拖挂的位置,将挂钩下放,从而实现自动上钩。
如图2所示为本发明一实施例的基于TOF相机的自动倒车上挂方法的流程图。
请参考图2,本实施例的自动倒车上挂方法包括以下步骤:
S91:通过TOF相机采集无人机后方的后视深度图像;
S92:根据后视深度图像信号来识别待拖挂以及拖挂的位置,进而设定无人车的倒车路径,以实现无人车的倒车促使待拖挂车辆的待拖挂以及无人车的拖挂进行自动连接;
S93:检测待拖挂车辆的待拖挂与无人机的拖挂之间是否连接成功。
较佳实施例中,S93之后还包括:
S101:当待拖挂与拖挂之间未连接成功时,控制无人车前进,以实现多次重复前进倒车进行拖挂连接。
较佳实施例中,S93进一步为:通过机械碰撞信号和/或压力信号来检测待拖挂车辆的待拖挂与无人机的拖挂之间是否连接。
较佳地,还包括:将上挂的信息上传给云端的系统,从而让全系统共享目前的正在实际运营的无人物流车的情况,保证整个系统的高效运营。
本发明上述实施例,通过将上挂的信息上传给云端的系统,从而让全系统共享目前的正在实际运营的无人物流车的情况,保证整个系统的高效运营。
此处公开的仅为本发明的优选实施例,本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,并不是对本发明的限定。任何本领域技术人员在说明书范围内所做的修改和变化,均应落在本发明所保护的范围内。
- 一种基于TOF相机的自动倒车上挂系统及方法
- 基于TOF成像系统的自动曝光方法及自动曝光时间计算方法和TOF相机