一种车载前向毫米波雷达安装误差自校准方法
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及毫米波雷达的校准技术领域,尤其涉及一种车载前向毫米波雷达安装误差自校准方法。
背景技术
现行使用的前向毫米波雷达应用高级驾驶辅助系统,例如自适应巡航ACC系统,自动紧急刹车AEB系统。依靠发射特定频率(76GHz-81GHz)的电磁波,接收和处理回波信号来侦测前方目标的特性参数,如距离,相对速度,角度和反射功率等。由于天线对发射的电磁波做了聚波处理,因此雷达的探测有一定的方向性,探测范围在垂直于天线面的一定开角内(FieldofviewFov)。因此雷达的安装有一定的误差要求,当安装倾斜角度过大,致使天线面与行驶方向的偏离过大,会造成回波功率的衰减而无法准确探测到目标。当安装倾斜角度在容许范围之内,可以通过标定来把角度误差带来的探测错误校正。但是标定程序需要在车出厂前,在车厂用精确昂贵的标定设备来完成。不但耗费时间,而且一旦车架位置发生细微变化(比如碰撞或者松动),雷达必须回到原厂做重新标定,造成很大的麻烦。
发明内容
本发明旨在提供一种车载前向毫米波雷达安装误差自校准方法克服上述问题或者至少部分地解决上述问题,以解决毫米波雷达的校准技术问题。
为达到上述目的,本发明的技术方案具体是这样实现的:
一种车载前向毫米波雷达安装误差自校准方法,包括如下步骤:
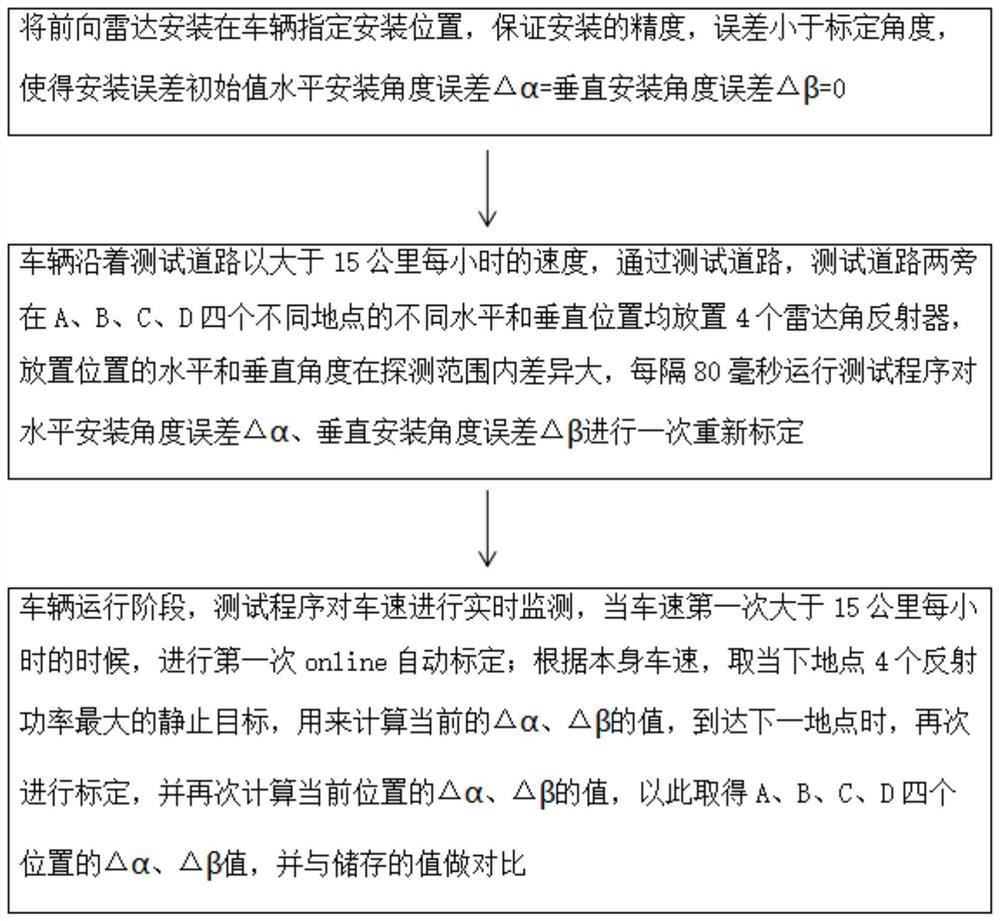
(1)将前向雷达安装在车辆指定安装位置,保证安装的精度,误差小于标定角度,使得安装误差初始值水平安装角度误差Δα=垂直安装角度误差Δα=0;
(2)车辆沿着测试道路以大于15公里每小时的速度,通过测试道路,测试道路两旁在A、B、C、D四个不同地点的不同水平和垂直位置均放置4个雷达角反射器,放置位置的水平和垂直角度在探测范围内差异大,位置本身无需精确,每隔80毫秒运行测试程序对水平安装角度误差Δα、垂直安装角度误差Δβ进行一次重新标定;
(3)车辆运行阶段,测试程序对车速进行实时监测,当车速第一次大于15公里每小时的时候,进行第一次online自动标定;根据本身车速,取当下地点4个反射功率最大的静止目标,用来计算当前的Δα、Δβ的值,到达下一地点时,再次进行标定,并再次计算当前位置的Δα、Δβ的值,以此取得A、B、C、D四个位置的Δα、Δβ值,并与储存的值做对比。
如果四次测试都出现偏差大于标定角度时,显示错误,自动标定失败,检查雷达安装;
当前探测到Δβ的值与储存的上一轮的值的差别在范围内,通过对前n个储存数值取加权平均值得出当前的Δα、Δβ值,作为当前使用的角度矫正;
当前速度小于15km/s或者环境中无法取到4个有效静止目标,可经过多次测试,直到标定的条件满足。
作为本发明进一步的方案,所述测试道路设置为直行道加回转弯的结构,在直行道位于回转弯段的左侧位置设置A处雷达角反射器,在直行道位于回转弯段右侧的位置设置D处雷达角反射器,在回转弯段右端点的位置设置B处雷达角反射器,在回转弯段左端点的位置设置C处雷达角反射器,测试车辆沿着直行道、回转弯道、直行道的顺序行驶,按照A、B、C、D的顺序依次通过测试点。
作为本发明进一步的方案,在所述的A、B、C、D四个测试点上均放置有四个角雷达发射器,四个角雷达反射器分为两组,两组角雷达反射器分别对称设置在测试点的路段两侧,每组角雷达反射器包括两个处于不同上下高度位置的角雷达反射器。
作为本发明更进一步的方案,所述所述步骤(3)中,测试程序对运行阶段的车速进行实时监测阶段,包括:
从CAN读取当前车辆速度值Vx0;
当车速第一次大于15km/h的时候,进行第一次online标定;
根据本身车速,取环境中4个反色功率最大的静止目标,取用该探测信号的回波信号中的径向速度Vr,角度信息θ、α,以及当前的轮速Vx,用来计算当前Δα、Δβ的值;
若当前车速小于15km/h或环境中无法取到4个有效禁止目标时,可经过多次测试,直到标定的条件满足;
最后将Δα、Δβ的值,与储存的值进行对比;
当偏差大于标定角度,重复测试,若3次测试都不通过,显示错误,自动标定失败,检查雷达安装;
当前探测到Δα、Δβ的值与储存的上一轮的值的差别在范围内,通过对前n个储存数值取加权平均值得出当前的Δα、Δβ值,作为当前使用的角度矫正。
本发明提供了一种车载前向毫米波雷达安装误差自校准方法,有益效果在于:本发明优化了车载前向毫米波雷达安装误差自校准方法,通过采取在不同路段的检测,判别车辆在直行、直行-转弯、转弯-转弯、转弯-直行的多种不同的行驶状况下,雷达标定的误差,以此在不同的使用环境下判别雷达的安装误差,具有普适性。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域的普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图。
图1为本发明的测试路段示意图。
图2为本发明的步骤流程示意图。
图3为本发明的计算原理示意图。
图4为本发明中步骤(3)的逻辑框图。
具体实施方式
下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
参见图1,本发明实施例提供的一种车载前向毫米波雷达安装误差自校准方法,其中测试道路设置为直行道加回转弯的结构,在直行道位于回转弯段的左侧位置设置A处雷达角反射器,在直行道位于回转弯段右侧的位置设置D处雷达角反射器,在回转弯段右端点的位置设置B处雷达角反射器,在回转弯段左端点的位置设置C处雷达角反射器,测试车辆沿着直行道、回转弯道、直行道的顺序行驶,按照A、B、C、D的顺序依次通过测试点;在A、B、C、D四个测试点上均放置有四个角雷达发射器,四个角雷达反射器分为两组,两组角雷达反射器分别对称设置在测试点的路段两侧,每组角雷达反射器包括两个处于不同上下高度位置的角雷达反射器。
参见图2,一种车载前向毫米波雷达安装误差自校准方法,包括如下步骤:
(1)将前向雷达安装在车辆指定安装位置,保证安装的精度,误差小于标定角度,使得安装误差初始值水平安装角度误差Δα=垂直安装角度误差Δα=0;
(2)车辆沿着测试道路以大于15公里每小时的速度,通过测试道路,测试道路两旁在A、B、C、D四个不同地点的不同水平和垂直位置均放置4个雷达角反射器,放置位置的水平和垂直角度在探测范围内差异大,位置本身无需精确,每隔80毫秒运行测试程序对水平安装角度误差Δα、垂直安装角度误差Δβ进行一次重新标定;
(3)车辆运行阶段,测试程序对车速进行实时监测,当车速第一次大于15公里每小时的时候,进行第一次online自动标定;根据本身车速,取当下地点4个反射功率最大的静止目标,用来计算当前的Δα、Δβ的值,到达下一地点时,再次进行标定,并再次计算当前位置的Δα、Δβ的值,以此取得A、B、C、D四个位置的Δα、Δβ值,并与储存的值做对比。
如果四次测试都出现偏差大于标定角度时,显示错误,自动标定失败,检查雷达安装;
当前探测到Δβ的值与储存的上一轮的值的差别在范围内,通过对前n个储存数值取加权平均值得出当前的Δα、Δβ值,作为当前使用的角度矫正;
当前速度小于15km/s或者环境中无法取到4个有效静止目标,可经过多次测试,直到标定的条件满足。
参阅图3,由于多普勒效应雷达可以探测到目标和探测车辆间的径向速度标量,如果目标(target)本身是静止的,且雷达安装无误差。雷达天线面完全与行进方向(x)垂直,这个探测到的速度就是探测车辆本身行进速度在目标方向上的一个分量。
可得Vr=Vx·sinθ·cosα
Vr为探测到的车辆径向相对速度
Vx为探测到的测量行进速度
θ为目标与探测车辆的在垂直方向的夹角
α为目标与探测车辆的在水平方向的夹角
当雷达有一定的误差,其水平安装角度误差为Δα,垂直安装角度误差是Δβ
Vr=Vx·cos(β+Δβ)·cos(α+Δα)
=Vx·(cosβ·cosΔβ—sinβ·sinΔβ)·(cosα·cosΔα-sinα·sinΔα)
由于β>>Δβ,α>>Δα
cosΔβ≈1,cosΔα≈1,sinΔβ≈Δβ,sinΔα≈Δα,可得
Vr=Vx·(cosβ—sinβ·Δβ)·(cosα-sinα·Δα)
其中Vr,α,可以通过雷达探测得到,Vx可以通过读取轮速传感器的信号
得到
c
f
f
请参阅图4,在步骤(3)中,测试程序对运行阶段的车速进行实时监测阶段,包括:
从CAN读取当前车辆速度值Vx0
当车速第一次大于15km/h的时候,进行第一次online标定;
根据本身车速,取环境中4个反色功率最大的静止目标,取用该探测信号的回波信号中的径向速度Vr,角度信息θ、α,以及当前的轮速Vx,用来计算当前Δα、Δβ的值;
所涉及的公式计算如下:
Vr
Vr
Vr
Vr
若当前车速小于15km/h或环境中无法取到4个有效禁止目标时,可经过多次测试,直到标定的条件满足;
最后将Δα、Δβ的值,与储存的值进行对比;
当偏差大于标定角度,重复测试,若3次测试都不通过,显示错误,自动标定失败,检查雷达安装;
当前探测到Δα、Δβ的值与储存的上一轮的值的差别在范围内,通过对前n个储存数值取加权平均值得出当前的Δα、Δβ值,作为当前使用的角度矫正。
应当指出的是,本公开不限于前述实施方式并且可以在不背离本公开的精神的情况下适当地改变。例如,减少和增加雷达角反射器,提高最大似然估计精度;例如,改变初始车速在不同的车速下多次测量取平均后标定Δα、Δβ;例如,减少或增加测试程序的周期;此外,为了更好的及时和准确反馈数据,还可以将当前探测到Δα、Δβ的值与测试阶段安装误差初始值水平安装角度误差Δα、垂直安装角度误差Δβ相对比取差值后,与当前探测到Δα、Δβ的值与储存的上一轮的值做加权平均获得新的比较值作为当前使用的角度矫正。
以上仅为本申请的实施例而已,并不用于限制本申请。对于本领域技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本申请的权利要求范围之内。
- 一种车载前向毫米波雷达安装误差自校准方法
- 一种基于特定形状金属的车载毫米波雷达自校准方法