一种具有巡逻功能的物业管理机器人
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及物业管理技术领域,尤其涉及一种具有巡逻功能的物业管理机器人。
背景技术
随着城市建设的发展,各种住宅、商业大厦、办公大楼、标准工业厂房以及住宅小区日益增多,相应配套的物业管理也走进了大众的视野,成为人们生活中不可或缺的服务,安全、舒适、放心的居住环境是人们对高质量生活的追求;管理方面是做好户籍、产权、产业、租赁、租金、设备等方面的管理工作,物业管理,基本分为管理和服务两个方面,服务方面主要是充分保证满足用户要求,及时登门进行日常服务,物业安全管理是小区或写字楼等场所物业管理中的重要一环,机器人是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,机器人应用于各行各业,现在很多物业管理场所都采用机器人进行巡逻,然而现有的物业管理机器人在巡逻过程中无法同时对地面进行清障和清扫,且机器人的拓展功能性较差,无法满足不同的使用需求。
发明内容
本发明的目的是为了解决现有技术中存在的缺点,而提出的一种具有巡逻功能的物业管理机器人。
为了实现上述目的,本发明采用了如下技术方案:
一种具有巡逻功能的物业管理机器人,包括巡逻机器人本体、行走控制总成、顶板、旋转座、调节座、驱动总成、两个清扫总成和搅拌喷洒总成,所述行走控制总成设置在巡逻机器人本体上,所述巡逻机器人本体的底部开设有固定槽,两个所述清扫总成均设置在固定槽内,所述行走控制总成与两个清扫总成相连接,所述搅拌喷洒总成设置在巡逻机器人本体上,所述清扫总成与搅拌喷洒总成相连接,所述顶板固定安装在巡逻机器人本体的顶部,所述顶板上开设有固定孔,所述旋转座转动安装在固定孔内,所述调节座设置在旋转座上,所述调节座上固定安装有监视器,所述驱动总成设置在旋转座上,所述驱动总成与调节座相连接,所述清扫总成与驱动总成相连接;
所述清扫总成包括安装杆、清扫座、两个圆杆、两个扇叶、两个过滤盒、两个第一锥齿轮、两个第二锥齿轮、两个齿轮四和连接环板,所述安装杆转动安装在固定槽内,所述清扫座固定安装在安装杆的底端,所述清扫座的底部开设有多个清扫头,所述清扫座上开设有固定腔,所述固定腔的底部内壁上开设有多个吸尘孔,固定腔的两侧内壁上均开设有通风孔,所述圆杆转动安装在对应的通风孔内,所述扇叶固定安装在对应的圆杆的一端,两个所述过滤盒均固定安装在固定腔内,第一锥齿轮固定安装在对应的圆杆上,所述清扫座上转动安装有两个固定杆,第二锥齿轮固定安装在对应的固定杆的底端,所述第二锥齿轮与第一锥齿轮啮合,齿轮四固定安装在圆杆的顶端,所述连接环板固定安装在固定槽内,所述连接环板的内圈固定连接有齿条四,所述齿轮四与齿条四啮合。
具体的,所述行走控制总成包括两个转动轴、第一控制轮、步进电机和第二控制轮,两个所述转动轴均转动安装在巡逻机器人本体上,两个所述转动轴的两端均固定安装有行走轮,所述第一控制轮固定安装在转动轴上,所述步进电机固定安装在固定槽的内壁上,所述第二控制轮固定安装在步进电机的输出轴上,所述第二控制轮与第一控制轮啮合。
具体的,所述转动轴上固定安装有蜗杆,所述安装杆上固定安装有蜗轮,所述蜗轮与蜗杆啮合。
具体的,所述搅拌喷洒总成包括两个喷洒头、两个搅拌杆、两个第四锥齿轮、控制杆和第三锥齿轮,所述巡逻机器人本体上开设有两个存放腔,两个所述存放腔的一侧内壁上均开设有安装孔,所述喷洒头固定安装在对应的安装孔内,两个喷洒头上均固定安装有连接管,所述连接管设置在对应的存放腔内,两个所述存放腔相互靠近的一侧内壁上开设有同一个通孔。
具体的,两个所述搅拌杆均转动安装在通孔内,所述第四锥齿轮固定安装在对应的搅拌杆上,所述第四锥齿轮与两个第三锥齿轮啮合,所述搅拌杆的底端延伸至固定槽内并固定安装有第一带轮,安装杆上固定安装有第二带轮,第二带轮与第一带轮传动连接有同一个皮带。
具体的,所述通孔内固定安装有两个密封轴承的外圈,所述搅拌杆固定安装在对应的密封轴承的内圈。
通过上述技术方案:密封轴承可以保证通孔的密封性能。
具体的,所述固定槽的顶部内壁上开设有两个连接槽,所述安装杆转动安装在对应的连接槽内。
通过上述技术方案:安装杆在连接槽内转动时可稳定其转动时的位置。
具体的,所述固定腔的顶部内壁上开设有连接孔,所述固定杆转动安装在连接孔内。
通过上述技术方案:固定杆在连接孔内转动时,可保证其转动时的稳定性。
与现有技术相比,本发明的有益效果在于:
(1)本发明的一种具有巡逻功能的物业管理机器人,在巡逻时可借助行走控制总成的动力控制两个清扫总成对地面进行清扫,提升地面使用环境,且可取消了额外的清扫设备的设置和使用,在清扫过程中还可对灰尘和杂质进行收集。
(2)本发明的一种具有巡逻功能的物业管理机器人,清扫过程中可控制监视器来回运动,增加监视范围,提升监视效率,还可在巡逻机器人本体上添加需要的功能,加入消毒液可对途径区域进行消毒,加入香氛液体可以对途径区域进行空气净化。
附图说明
为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整。
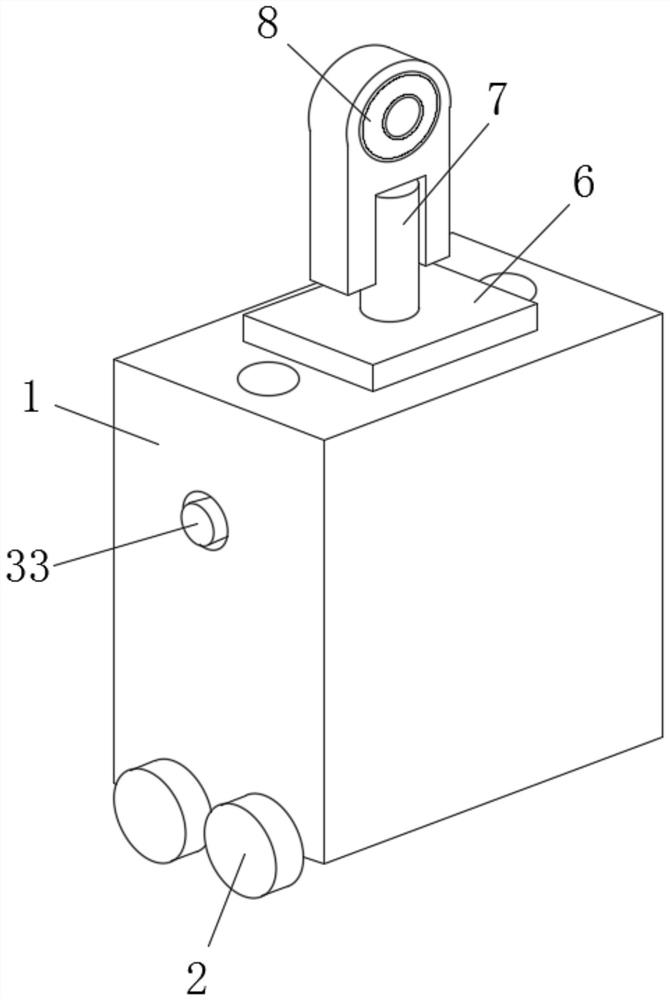
图1为本发明提出的一种具有巡逻功能的物业管理机器人的立体结构示意图;
图2为本发明提出的一种具有巡逻功能的物业管理机器人的主视结构示意图;
图3为本发明提出的一种具有巡逻功能的物业管理机器人的A部分结构示意图;
图4为本发明提出的一种具有巡逻功能的物业管理机器人的B部分结构示意图;
图5为本发明提出的一种具有巡逻功能的物业管理机器人的C部分结构示意图;
图6为本发明提出的一种具有巡逻功能的物业管理机器人的D部分结构示意图。
图中:1、巡逻机器人本体;2、行走轮;3、转动轴;4、第一控制轮;5、步进电机;6、顶板;7、旋转座;8、调节座;9、连接杆;10、齿轮一;11、齿条一;12、丝杆;13、齿轮二;14、齿条三;15、齿轮三;16、控制杆;17、凸轮;18、第一带轮;19、蜗杆;20、清扫座;21、第二带轮;22、蜗轮;23、清扫头;24、过滤盒;25、扇叶;26、第一锥齿轮;27、第二锥齿轮;28、齿轮四;29、连接环板;30、第三锥齿轮;31、搅拌杆;32、第四锥齿轮;33、喷洒头。
具体实施方式
以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参照图1-6,一种具有巡逻功能的物业管理机器人,包括巡逻机器人本体1、行走控制总成、顶板6、旋转座7、调节座8、驱动总成、两个清扫总成和搅拌喷洒总成,所述行走控制总成设置在巡逻机器人本体1上,所述巡逻机器人本体1的底部开设有固定槽,两个所述清扫总成均设置在固定槽内,所述行走控制总成与两个清扫总成相连接,所述搅拌喷洒总成设置在巡逻机器人本体1上,所述清扫总成与搅拌喷洒总成相连接,所述顶板6固定安装在巡逻机器人本体1的顶部,所述顶板6上开设有固定孔,所述旋转座7转动安装在固定孔内,所述调节座8设置在旋转座7上,所述调节座8上固定安装有监视器,所述驱动总成设置在旋转座7上,所述驱动总成与调节座8相连接,所述清扫总成与驱动总成相连接;
所述清扫总成包括安装杆、清扫座20、两个圆杆、两个扇叶25、两个过滤盒24、两个第一锥齿轮26、两个第二锥齿轮27、两个齿轮四28和连接环板29,所述安装杆转动安装在固定槽内,所述清扫座20固定安装在安装杆的底端,所述清扫座20的底部开设有多个清扫头23,所述清扫座20上开设有固定腔,所述固定腔的底部内壁上开设有多个吸尘孔,固定腔的两侧内壁上均开设有通风孔,所述圆杆转动安装在对应的通风孔内,所述扇叶25固定安装在对应的圆杆的一端,两个所述过滤盒24均固定安装在固定腔内,第一锥齿轮26固定安装在对应的圆杆上,所述清扫座20上转动安装有两个固定杆,第二锥齿轮27固定安装在对应的固定杆的底端,所述第二锥齿轮27与第一锥齿轮26啮合,齿轮四28固定安装在圆杆的顶端,所述连接环板29固定安装在固定槽内,所述连接环板29的内圈固定连接有齿条四,所述齿轮四28与齿条四啮合,齿轮四28在连接环板29内运动并与齿条四啮合,使得齿轮四28带动固定杆转动,固定杆带动第二锥齿轮27转动,第二锥齿轮27带动第一锥齿轮26转动,第一锥齿轮26带动扇叶25转动,扇叶25带动固定腔内的空气流动,可将清扫座20周围的灰尘杂质进行吸附。
请再次参阅图2和图3,本实施例中,行走控制总成包括两个转动轴3、第一控制轮4、步进电机5和第二控制轮,两个所述转动轴3均转动安装在巡逻机器人本体1上,两个所述转动轴3的两端均固定安装有行走轮2,所述第一控制轮4固定安装在转动轴3上,所述步进电机5固定安装在固定槽的内壁上,所述第二控制轮固定安装在步进电机5的输出轴上,所述第二控制轮与第一控制轮4啮合,步进电机5带动第二控制轮转动,第二控制轮带动第一控制轮4转动,第一控制轮4带动转动轴3转动,转动轴3带动两个行走轮2转动,行走轮2可带动巡逻机器人本体1进行移动巡逻。
请再次参阅图2,本实施例中,转动轴3上固定安装有蜗杆19,所述安装杆上固定安装有蜗轮22,所述蜗轮22与蜗杆19啮合。
请再次参阅图2和图4,本实施例中,搅拌喷洒总成包括两个喷洒头33、两个搅拌杆31、两个第四锥齿轮32、控制杆16和第三锥齿轮30,所述巡逻机器人本体1上开设有两个存放腔,两个所述存放腔的一侧内壁上均开设有安装孔,所述喷洒头33固定安装在对应的安装孔内,两个喷洒头33上均固定安装有连接管,所述连接管设置在对应的存放腔内,两个所述存放腔相互靠近的一侧内壁上开设有同一个通孔,喷洒头33可对消毒液进行喷洒。
请再次参阅图3,本实施例中,两个所述搅拌杆31均转动安装在通孔内,所述第四锥齿轮32固定安装在对应的搅拌杆31上,所述第四锥齿轮32与两个第三锥齿轮30啮合,所述搅拌杆31的底端延伸至固定槽内并固定安装有第一带轮18,安装杆上固定安装有第二带轮21,第二带轮21与第一带轮18传动连接有同一个皮带,安装杆同时还带动第二带轮21转动,第二带轮21借助皮带带动第一带轮18和控制杆16转动,控制杆16带动第三锥齿轮30转动。
请再次参阅图4,本实施例中,通孔内固定安装有两个密封轴承的外圈,所述搅拌杆31固定安装在对应的密封轴承的内圈,密封轴承可以保证通孔的密封性能。
请再次参阅图4,本实施例中,固定槽的顶部内壁上开设有两个连接槽,所述安装杆转动安装在对应的连接槽内,安装杆在连接槽内转动时可稳定其转动时的位置。
请再次参阅图6,本实施例中,固定腔的顶部内壁上开设有连接孔,所述固定杆转动安装在连接孔内,固定杆在连接孔内转动时,可保证其转动时的稳定性。
请再次参阅图5,本实施例中,驱动总成包括连接杆9、齿轮一10、齿条一11、丝杆12、齿轮二13、齿条三14和齿轮三15,所述调节座8的底部开设有凹槽,所述连接杆9固定安装在凹槽内,所述旋转座7上开设有控制孔,连接杆9安装在控制孔内,所述齿轮一10固定安装在连接杆9上,所述控制孔的底部内壁上开设有安装槽,所述齿条一11滑动安装在安装槽内,齿条一11与齿轮一10啮合,齿条一11的一端开设有螺纹槽,丝杆12螺纹安装在螺纹槽内,旋转座7的一侧开设有放置槽,齿轮二13转动安装在放置槽内,丝杆12的一端固定安装在齿轮二13上,固定孔的内壁上固定安装有齿条二,齿条二与齿轮二13啮合,齿轮三15固定安装在旋转座7的底部,固定孔的内壁上开设有压簧槽,齿条三14滑动安装在压簧槽内,齿条三14与齿轮三15啮合,凸轮17固定安装在控制杆16的顶端,齿条三14与凸轮17啮合,齿条三14的一端固定安装有压簧,压簧的一端固定连接在压簧槽的内壁上。
本实施例中,步进电机5带动第二控制轮转动,第二控制轮带动第一控制轮4转动,第一控制轮4带动转动轴3转动,转动轴3带动两个行走轮2转动,行走轮2可带动巡逻机器人本体1进行移动巡逻,监视器可对周围环境进行拍摄,转动轴3带动蜗杆19转动,蜗杆19带动蜗轮22和安装杆转动,安装杆带动清扫座20转动,清扫座20带动多个清扫头23转动,清扫头23可对地面进行清扫,同时齿轮四28在连接环板29内运动并与齿条四啮合,使得齿轮四28带动固定杆转动,固定杆带动第二锥齿轮27转动,第二锥齿轮27带动第一锥齿轮26转动,第一锥齿轮26带动扇叶25转动,扇叶25带动固定腔内的空气流动,可将清扫座20周围的灰尘杂质进行吸附,并且过滤盒24可对其进行过滤收集,安装杆同时还带动第二带轮21转动,第二带轮21借助皮带带动第一带轮18和控制杆16转动,控制杆16带动第三锥齿轮30转动,第三锥齿轮30传动两个第四锥齿轮32同时转动,第四锥齿轮32带动对应的搅拌杆31转动,两个搅拌杆31可对两个存放腔内的消毒液进行混合搅拌,喷洒头33可对消毒液进行喷洒,控制杆16还带动凸轮17转动,凸轮17挤压齿条三14,齿条三14带动齿轮三15转动,在压簧的弹性作用下可带动齿条三14复位,使得齿轮三15带动旋转座7来回转动,旋转座7带动调节座8来回旋转的同时,齿轮二13在齿条二上来回运动,使得齿轮二13带动丝杆12来回转动,丝杆12带动齿条一11来回运动,齿条一11带动齿轮一10和连接杆9来回转动,使得连接杆9带动调节座8来回摆动,可增加监视范围。
本发明相对现有技术获得的技术进步是:本发明的物业管理机器人在巡逻过程中可以同时对地面进行清障和清扫,且机器人的拓展功能性较好,可对周围环境充分巡视,还能对周围环境进行消毒,可满足不同的使用需求。
- 一种具有巡逻功能的物业管理机器人
- 一种具有减震和散热功能的户外巡逻机器人