识别系统和识别方法
文献发布时间:2023-06-19 11:55:48
技术领域
本发明涉及信息安全领域,尤其涉及一种识别系统、以及一种识别方法。
背景技术
随着信息安全技术的发展,无钥匙识别技术的应用范围越来越广,并逐步进入到各领域。此类技术多采用用户主动发射射频信号、移动网络信号、或蓝牙信号等无线通信手段来实现识别功能,或采用待识别设备主动生物识别手段来实现识别功能。用户主动发出信号的识别手段操作不够便捷,而主动识别的方式为了提升安全性,又存在功耗较大的缺陷。
发明内容
鉴于上述现有技术的不足,本申请的目的在于提供一种识别系统和一种识别方法,能够在无钥匙的情况下实现准确识别的同时,保证识别过程的低功耗特性,具体包括如下方案:一种识别系统,包括唤醒模块、识别模块、存储器、第一采集单元和第二采集单元;
所述唤醒模块与所述第一采集单元电性连接,并用于接收所述第一采集单元在预设范围内采集得到的目标信息;
所述识别模块与所述第二采集单元电性连接,所述识别模块用于接收所述第二采集单元基于所述目标信息采集得到的二次目标信息,并调用所述存储器内预存的特征信息,所述识别模块将所述二次目标信息与所述特征信息进行匹配,并在匹配成功后输出匹配成功指令。
本申请识别系统,将所述唤醒模块和所述第一采集单元电性连接,并通过所述第一采集单元在预设范围内采集得到所述目标信息,且当所述唤醒模块采集到所述目标信息后,所述唤醒模块向所述识别模块发出所述激活指令,以使得所述识别模块开始工作。所述识别模块与所述第二采集单元电性连接,且所述识别模块接收到所述激活指令后,通过所述第二采集单元基于所述目标信息采集得到所述二次目标信息,同时,所述识别模块还调用所述存储器内预存的所述特征信息,并将所述二次目标信息和所述特征信息进行匹配。匹配成功后,所述识别模块输出所述匹配成功指令,所述匹配成功指令能够打开门锁或唤醒对应设备。本申请所述第一采集单元能够在低功耗待机状态下采集所述目标信息,并先通过低功耗进行采集目标信号后,再唤醒深度识别,使得能够在实现识别功能的同时,实现待机的低功耗以及实现解锁的便利性和安全性。
可选地,所述唤醒模块还调用所述存储器内预存的唤醒信息,并将所述目标信息与所述唤醒信息进行匹配,所述唤醒模块在匹配成功后向所述识别模块发出激活指令。
先将所述目标信息与所述唤醒信息进行匹配后再向所述识别模块发出激活指令,能够增加所述识别系统的安全性。
可选地,所述第一采集单元为第一摄像头、或射频接收器、或红外探测器中的一者,对应所述目标信息分别为目标图像信息、或目标射频信号、或目标探测信号中的一者,以及所述唤醒信息分别为唤醒图像信息、或唤醒射频信号、或唤醒探测信号中的一者。
通过设置具有不同功能的所述第一采集单元可以采集到不同类型的所述目标信息,进而能够生成不同的对应所述唤醒信号,以唤醒所述识别模块开始工作,不同功能的所述第一采集单元为所述识别系统提供了多种唤醒方式,以增加所述识别系统的多功能化。
可选的,所述第一采集单元为第一摄像头,所述第一摄像头为超低功耗摄像头(Ultra Low Power Camera,ULPC),所述识别系统还包括补光灯,所述补光灯用于在光线不足时为所述第一摄像头提供补光。
低功耗摄像头具有成本简单,功耗小,过滤性强等特点,并能够通过光学灵活设计策略,判断采集到的目标图像是否存在开锁意图。而补光灯的设置可以在环境光线偏暗的情况下保证低功耗摄像头的有效工作。
可选的,所述无钥匙探测系统还包括预探测模块,所述预探测模块为被动式红外探测器(Passive Infrared Detector,PIR),用于感测生物信息,并在感知到生物信息时,发送信号至所述唤醒模块。
所述预探测模块用于感测生物信息,并具有功耗更小的特点。设置预探测模块之后能够进一步降低所述唤醒模块的功耗,避免所述唤醒模块处于长期工作状态,进而利用功耗更低的预探测模块来完成感测生物信息的动作。
可选地,所述第一摄像头的数量为两个,以使得所述第一摄像头具有足够的视场范围采集所述目标图像信息。
两个所述第一摄像头能够保证较大的视场范围,进而能够采集较大范围内的所述目标图像,并增加所述识别系统的便利性。
可选地,所述第二采集单元为第二摄像头,对应所述二次目标信息为二次目标图像,以及所述特征信息为解锁图像信息;或,
所述第二采集单元为指纹识别模组,以及对应所述二次目标信息为目标指纹,所述特征信息为解锁指纹信息。
通过设置具有不同功能的所述第二采集单元可以生成不同的对应所述解锁信号,以完成解锁功能,且具有不同功能的所述第二采集单元能够提供多种解锁方式,为解锁提供较多的可选择性。
可选地,所述第二摄像头的视场范围覆盖所述第一摄像头的视场范围。
所述第二摄像头由所述第一摄像头采集得到所述目标图像后开始工作,因此,所述第二摄像头的视场范围覆盖所述第一摄像头的视场范围,能够保证所述目标图像同样也位于所述第二摄像头的视场范围,便于所述第二摄像头采集得到所述二次目标图像。
本申请还涉及一种识别方法,包括如下步骤:
控制唤醒模块通过第一采集单元在预设范围内采集目标信息;
若所述唤醒模块采集到所述目标信息,则控制所述唤醒模块向识别模块发出激活指令;
控制所述识别模块通过第二采集单元基于所述目标信息采集得到二次目标信息;
控制所述识别模块调用预存的特征信息,并将所述二次目标信息和所述特征信息进行匹配;
若匹配成功,则控制所述识别模块输出匹配成功指令。
本申请提供的识别方法,通过所述第一采集单元在预设范围内采集得到所述目标信息,且在所述唤醒模块采集到所述目标信息后发出所述激活指令以激活所述识别模块。进而通过所述第二采集单元基于所述目标信息采集得到所述二次目标信息,并控制所述识别模块调用预存的所述特征信息,并将所述二次目标信息和所述特征信息进行匹配,在匹配成功输出匹配成功指令解锁。本申请所述第一采集单元能够在低功耗待机状态下采集所述目标信息,并先通过低功耗进行初次匹配成功后,再唤醒深度识别,使得能够在实现识别功能的同时,实现待机的低功耗以及实现解锁的便利性和安全性。
可选的,在所述控制唤醒模块通过第一采集单元在预设范围内采集目标信息步骤之前,还包括步骤:
控制预探测模块探测到生物信息,并发出预探测信号。
本实施例避免了所述唤醒模块处于长期工作状态,进而利用功耗更低的预探测模块来完成感测生物信息的动作。
可选地,第一采集单元在预设范围内采集到目标信息后,所述唤醒模块调用预存的唤醒信息,并将获取到的所述目标信息和所述唤醒信息进行匹配,若匹配成功,所述唤醒模块向识别模块发出激活指令。
将所述目标信息与所述唤醒信息进行匹配后再使得所述识别模块发出激活指令,能够增加所述识别系统的安全性。
可选地,预存的所述唤醒信息为多个,所述控制所述唤醒模块调用预存的唤醒信息,并将获取到的所述目标信息和所述唤醒信息进行匹配,包括:
控制所述唤醒模块逐个调用预存的所述唤醒信息;
控制所述唤醒模块将获取到的所述目标信息与所述唤醒信息逐个进行匹配。
所述目标信息与多个所述唤醒信息逐个进行匹配,能够多方面地对所述目标信息进行确认,以增加唤醒模块的准确性。
可选地,预存的所述特征信息为多个,所述控制所述识别模块调用预存的特征信息,并将所述二次目标信息和所述特征信息进行匹配,包括:
控制所述识别模块逐个调用预存的所述特征信息;
控制所述识别模块将获取到的所述二次目标信息与所述特征信息逐个进行匹配。
所述二次目标信息与多个所述特征信息逐个进行匹配,匹配成功后生成所述匹配成功指令,能够在保证解锁安全性的同时,增加所述识别的速率。
可选地,所述第一采集单元为第一摄像头,所述第二采集单元为第二摄像头,所述控制所述唤醒模块向识别模块发出激活指令,包括:
控制所述唤醒模块向所述识别模块发出激活指令,且所述激活指令中包含有对应所述目标信息的位置信息;
然后,所述控制所述识别模块通过第二采集单元基于所述目标信息采集得到二次目标信息,包括:
控制所述识别模块基于所述位置信息识别所述目标信息的方位;
控制所述识别模块通过所述第二摄像头基于所述目标信息的方位采集所述二次目标信息。
所述激活指令包括所述目标信息的所述位置信息时,能够使得所述第二摄像头能够较好滴对所述目标信息进行定位,进而能够准确地基于所述目标信息得到所述二次目标信息,由此能够增加所述识别方法的准确率。
附图说明
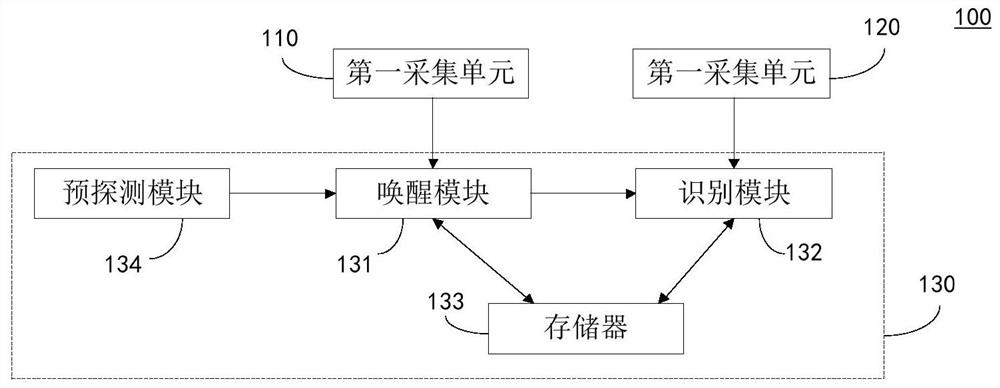
图1是本发明涉及的识别系统的结构框图;
图2和图3是本发明涉及的识别系统中预设范围的角度示意图;
图4是本发明涉及的识别系统一种实施例的示意图;
图5是本发明涉及的识别方法的流程示意图;
图6-图9是本发明涉及的识别方法的其余实施例的流程示意图。
附图标记说明:
100-识别系统;110-第一采集单元;120-第二采集单元;130-主控器;131-唤醒模块;132-识别模块;133-存储器;134-预探测模块。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
此外,以下各实施例的说明是参考附加的图示,用以例示本发明可用以实施的特定实施例。本发明中所提到的方向用语,例如,“上”、“下”、“前”、“后”、“左”、“右”、“内”、“外”、“侧面”等,仅是参考附加图式的方向,因此,使用的方向用语是为了更好、更清楚地说明及理解本发明,而不是指示或暗指所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
本申请识别系统100,可以应用于汽车、智能终端、门禁等需要设置识别的场景,并通过该无钥匙识别系统100完成如汽车门锁、智能终端识别应用、门禁打开等场景的智能控制。具体请参见图1所示的识别系统100的系统结构框图,其中,识别系统100包括第一采集单元110、第二采集单元120、唤醒模块131、识别模块132和存储器133。唤醒模块131和第一采集单元110电性连接,识别模块132与第二采集单元120电性连接,唤醒模块131和识别模块132之间电性连接,且唤醒模块131和识别模块132分别与存储器133电性连接。
第一采集单元110用于在预设范围内持续采集图像或信号,唤醒模块131用于接收第一采集单元110采集得到的图像或信号,并在图像或信号中搜寻是否存在目标信息。当唤醒模块131查找到目标信息后,可以调用存储器133内预存的唤醒信息,并将目标信息和预存信息进行匹配。唤醒信息为对应目标信息的预存参数,唤醒信息需要与目标信息为同一种类的信息,如对应人脸的唤醒图像信息、对应人体型或动作特征的唤醒图像信息、对应特定射频的唤醒射频信息等。若匹配成功,则唤醒模块131生成激活指令,并将激活指令传输至识别模块132,启动识别模块132工作。
识别模块132接收到唤醒模块131发出的激活指令后,与识别模块132电性连接的第二采集单元120开始对目标信息进行深度信息识别,并得到对应目标信息的二次目标信息。可以理解的,二次目标信息与目标信息针对同一目标获得,也即,二次目标信息是在已搜寻到的目标信息的基础上进一步得到的。在本申请识别系统100中,二次目标信息较目标信息具有较高的分辨率或较高的像素,同时还可以包括目标的深度信息,以收集到目标更精确的参数特征。
识别模块132得到二次目标信息后,可以调用存储器133中的特征信息,并将二次目标信息和特征信息进行匹配。可以理解的,特征信息也为对应二次目标信息的预存参数,特征信息需要与二次目标信息为同一种类的信息,如对应人脸的解锁图像信息、对应人体型或动作特征的解锁图像信息、对应特定指纹的解锁指纹信息等。若匹配成功,识别模块132生成匹配成功指令并传输。在一种实施例中,存储器133内预存的唤醒信息可以为多个,在另一种实施例中,存储器133内预存的特征信息可以为多个。
需要提出的是,在本申请识别系统100中,目标信息与二次目标信息之间可以存在关联,如目标信息与二次目标信息均为图像信息,且二次目标信息的特征参数较目标信息的特征参数更多;在另一些实施例中,目标信息与二次目标信息也可以为不同种类的信息,只要二次目标信息能提供相较于目标信息更多的特征参数,以实现对目标的精确识别匹配即可。
在一种实施例中,第一采集单元110可以为第一摄像头,对应地,第一采集单元110采集到的目标信息即为第一摄像头采集到的目标图像信息,此时唤醒模块131调用存储器133中预存的唤醒信息即为唤醒图像信息,唤醒模块131将目标图像信息和唤醒图像信息进行匹配,并在匹配成功后生成激活指令。
需要提出的是,第一摄像头可以为低功耗摄像头(Ultra Low Power Camera,ULPC),该低功耗摄像头与唤醒模块131电性连接,且低功耗摄像头和唤醒模块131可以长时间待机。低功耗摄像头具有成本简单,功耗小,过滤性强等特点,并能够通过光学灵活设计策略,判断采集到的目标图像是否存在开锁意图。示例性的,低功耗摄像头ULPC可以通过远距离先侦测人体姿态,近距离识别人脸,以及判断人脸是否朝向低功耗摄像头来判断目标图像是否具有开锁信息。在本实施例中,低功耗摄像头ULPC通过摄像头进行多个图像信息的采集,并通过光敏传感器输出目标图像信息,再通过唤醒模块131中所带有的算法提取目标图像信息中的人形特征点,以及通过AI芯片判断得到是否发出激活指令,可以理解的,激活指令可以在唤醒模块131中间隔发出。在一种实施例中,第一摄像头可以通过调整其灵敏度来增加第一摄像头的唤醒准确率,可以理解的,当第一摄像头的灵敏度较低,可以避免第一摄像头的频繁触发,进而能够增加第一摄像头采集目标图像信息的准确度。在本实施例中,第一摄像头可以为低功耗摄像头ULPC。在另一种实施例中,为了防止馈电,可以在不同等级的蓄电池下自动调整第一摄像头的灵敏度,且通过算法的大量数据学习,能够使得进行至少十万张或百万张图片的计算,以保证唤醒模块131唤醒第二采集单元120的可靠性。在一种实施例中,第一摄像头还可以在低照度光线下进行工作,示例性的,低照度光线包括有月亮的室外或有灯光的室内。
在一种实施例中请参见图2和图3,以本申请识别系统应用于汽车的使用场景为例,第一摄像头可以具有第一视场范围和第二视场范围,其中,如图2所示,第一视场范围为平行于地面的平面范围,如图3所示,第二视场范围为垂直于地面的视场范围。可以理解的,第一视场范围和第二视场范围的角度越大,能够使得第一摄像头能够在较大的预设范围内采集图像信息,为识别系统100提供较好的便利性。
在一种实施例中,第一摄像头的数量可以为两个,且两个第一摄像头可以设置在任何位置。两个第一摄像头视场角的增加,可以增加采集目标图像的预设范围,进而能够较快地在较大范围内采集到目标图像,增加识别系统100的便利性。需要提出的是,第一摄像头的数量可以为多个,以使得多个第一摄像头能够覆盖所有的视场范围,示例性的,第一摄像头的数量可以为三个或四个,且三个或四个第一摄像头的总视场范围可以达到360度,以使得第一摄像头可以从各个方位采集目标图像。
在一种实施例中,识别系统100中还包括补光灯,用于在光线不足时为第一摄像头补光,以保证第一摄像头的有效工作。可以理解的,补光灯还可以用于为第二摄像头补光,并同时保证第二摄像头的有效工作。
在另一种实施例中请参见图4,第一采集单元110可以为射频接收器,对应地,第一采集单元110采集到的目标信息即为射频接收器接收到的目标射频信号,此时唤醒模块131调用存储器133中预存的唤醒信息为唤醒射频信号,唤醒模块131将目标射频信号和唤醒射频信号进行匹配,并在匹配成功后生成激活指令。需要提出的是,射频接收器可以为带有超宽带技术(Ultra Wide Band,UWB)的射频接收器,该射频接收器可以通过接收UWB设备所发出的射频信号,经识别系统100中的射频接收器接收到后生成目标射频信号。在本实施例中,UWB设备可以为手机、手表、手环等带有UWB技术的任一种电子设备。在一种实施例中,射频接收器所能接收射频信号的范围L1可以为半径小于等于5m的圆周范围。可以理解的,射频接收器可以为具有低功耗的射频接收器,使其能够在实现长时间待机的同时,具有较低的功率损耗。
在一种实施例中,本申请识别系统100还可以包括预探测模块134。预探测模块134可以用于感测生物信息,并在感测到生物信息时,发送预探测信号以激活唤醒模块131。预探测模块134具有功耗小的特点,可以选择比唤醒模块131功耗更小的器件来作为预探测模块134,如红外探测器(Passive Infrared Detector,PIR)。设置预探测模块134之后,预探测模块134处于实时工作的状态,避免唤醒模块131处于长期工作状态,进而利用功耗更低的预探测模块131来完成感测生物信息的动作,进而进一步降低识别系统100的整体功耗。
在另一种实施例中,第一采集单元110也可以为红外探测器,也即第一采集单元110直接采用功耗较小的红外探测器来实现。在对应的实施例中,第一采集单元110采集到的目标信息即为红外探测器采集到的目标探测信号,此时唤醒模块131调用存储器133中预存的唤醒信息即为唤醒探测信号,唤醒模块131将目标探测信号和唤醒探测信号进行匹配,并在匹配成功后生成激活指令。在本实施例中,当有人进入探测区域,并靠近红外探测器时,红外探测器采集生成目标探测信号。
在一种实施例中,第二采集单元120可以为第二摄像头,对应地,第二采集单元120采集得到的二次目标信息即为第二摄像头采集到的二次目标图像,此时识别模块132调用存储器133中预存的特征信息为解锁图像信息,识别模块132将二次目标图像和解锁图像信息进行匹配,并在匹配成功后生成匹配成功指令。可以理解的是,二次目标图像基于第一采集单元110采集得到的目标信息得到,也即,当第一采集模块为第一摄像头时,二次目标图像为识别模块132对目标图像是深度识别,其中,识别模块132对目标图像进行深度识别后得到的二次目标图像可以为3D图像,该二次目标图像具有较高的像素和较高的分辨率。可以理解的是,当第一采集单元110为射频接收器时,第二摄像头根据识别模块132接收到的目标射频信号,对发出目标射频信号的设备的携带者进行二次目标图像的采集,需要提出的是,目标射频信号中可以带有位置信息,以使得第二摄像头能够根据目标射频信号的准确方位进行二次目标图像的采集。
在另一种实施例中,第二采集单元120可以为指纹识别模组,对应地,第二采集单元120采集得到的二次目标信息即为指纹识别模组采集到的目标指纹,此时识别模块132调用存储器133中预存的特征信息为解锁指纹信息,识别模块132将目标指纹和解锁指纹信息进行匹配,并在匹配成功后生成匹配成功指令。可以理解的,当第一采集单元110为第一摄像头时,唤醒模组生成唤醒图像信息后,指纹识别模组启动为接收指纹状态,识别模组调用存储器133中的解锁图像信息,并与指纹识别模组接收到的目标指纹进行匹配,匹配成功后生成匹配成功指令。当第一采集单元110为射频接收器时,唤醒模组生成目标射频信号后,指纹识别模组启动为接收指纹状态,识别模组调用存储器133中的解锁指纹信息,并与指纹识别模组接收到的目标指纹进行匹配,匹配成功后生成匹配成功指令。
在一种实施例中,第二摄像头的视场范围可以覆盖第一摄像头的视场范围,可以理解的,当第一摄像头的数量为多个时,第二摄像头的数量也可以为多个。但第二摄像头与第一摄像头的数量不受限制,仅需使得第二摄像头的视场范围大于第一摄像头的视场范围即可,以使得第二摄像头可以准确对第一摄像头采集到的目标图像信息进行深度识别,并得到二次图像信息,进而增加识别系统100的便利性和安全性。
在一种实施例中,当第一采集单元110为第一摄像头和/或第二采集单元120为第二摄像头时,可以增加一些手势和/或动作来增加识别系统100的解锁安全等级。或描述为,第一摄像头采集到目标图像信息以及目标手势图像,可以唤醒第二采集单元120对目标图像信息进行深度识别,或,第二摄像头采集到二次目标图像以及目标手势图像,可以生成匹配成功指令。
在一种实施例中,第二摄像头可以为TOF摄像头(Time-of-Flight,TOF),TOF摄像头通过脉冲光源和单光子传感器对目标进行深度识别,并通过飞行时间测量得到重建的三维图像。其中,TOF摄像头可以支持低电压差分信号接口(Low Voltage DifferentialSignaling,LVDS)或MIPI接口(Mobile Industry Processor Interface)电性连接。在本实施例中,TOF摄像头所生成的三维图像具有较高的分辨率和清晰度,能够较好的保证二次目标图像的准确度。
在一种实施例中,识别系统100还可以与待识别设备的控制器和门锁通信连接,识别系统100内的唤醒模块131和识别模块132均可以与控制器直接电性连接,控制器与门锁之间也采用电性连接。在一种实施例中,唤醒模块131、识别模块132和存储器133均可以设置在一个主控器130内,主控器130与控制器之间可以为电性连接,进而可以实现唤醒模块131、识别模块132分别与控制器之间的电性连接。可以理解的,识别模块132生成匹配成功指令后,将匹配成功指令传输至控制器,控制器接收到匹配成功指令后控制门锁开启,进而能够实现识别功能。
本申请识别系统100,将唤醒模块131和第一采集单元110电性连接,并通过第一采集单元110在预设范围内采集得到目标信息,以及唤醒模块131调用存储器133内预存的唤醒信息,并将目标信息和唤醒信息进行匹配。匹配成功后,唤醒模块131向识别模块132发出激活指令,以使得识别模块132开始工作。识别模块132与第二采集单元120电性连接,且识别模块132接收到激活指令后,通过第二采集单元120基于目标信息采集得到二次目标信息,同时,识别模块132还调用存储器133内预存的特征信息,并将二次目标信息和特征信息进行匹配。匹配成功后,识别模块132输出匹配成功指令,匹配成功指令能够打开门锁。本申请第一采集单元110能够在低功耗待机状态下采集目标信息,并先通过低功耗进行初次匹配成功后,再唤醒深度识别,使得能够在实现识别功能的同时,实现待机的低功耗以及实现解锁的便利性和安全性。
本申请还涉及一种识别方法,请参见图5,包括如下步骤:
S10、控制唤醒模块131通过第一采集单元110在预设范围内采集目标信息;
具体的,在本实施例中,预设范围包括平行于地面的第一预设范围和垂直于地面的第二预设范围,因此,第一采集单元110在第一预设范围和/或第二预设范围内采集目标信息。在本实施例中,第一采集单元110可以为第一摄像头或射频接收器,当第一采集单元110为第一摄像头时,第一采集单元110采集得到的目标信息为目标图像信息,当第一采集单元110为射频接收器时,第一采集单元110采集得到的目标信息为目标射频信号,且唤醒模块131用于接收第一采集单元110采集得到的目标信息。
在另一种实施例中,当唤醒模块131接收到第一采集单元110采集得到的目标信息时,唤醒模块131调用存储器133中预存的唤醒信息,并将接收到的目标信息和唤醒信息进行匹配。可以理解的,当第一采集单元110采集得到的目标信息为目标图像信息时,对应的唤醒信息为唤醒图像信息,当第一采集单元110采集得到的目标信息为目标射频信号时,对应的唤醒信息为唤醒射频信号。
S20、若唤醒模块131采集到的目标信息,则控制唤醒模块131向识别模块132发出激活指令;
具体的,在本实施例中,当目标图像信息和唤醒图像信息之间的各个特征点均匹配成功,或,当目标射频信号与唤醒射频信号之间的各个特征点均匹配成功,唤醒模块131会生成激活指令。该激活指令能够激活识别模块132以及第二采集单元120开始工作,并通过第二采集单元对目标图像信息进行深度识别,或对发出目标射频信号的设备的携带者进行深度识别。
S30、控制识别模块132通过第二采集单元120基于目标信息采集得到二次目标信息;
具体的,在本实施例中,第二采集单元120同样在第一预设范围和/或第二预设范围内采集目标信息,且当第二采集单元120为第二摄像头时,第二摄像头基于目标图像信息或目标射频信号采集得到二次目标图像。当第二采集单元120为指纹识别模组时,指纹识别模组基于目标图像信息或目标射频信号采集得到目标指纹。同时,识别模块132接收二次目标图像或目标指纹。
S40、控制识别模块132调用预存的特征信息,并将二次目标信息和特征信息进行匹配;
具体的,在本实施例中,当识别模块132接收到第二采集单元120采集得到的二次目标图像或目标指纹时,识别模块132调用存储器133中预存的特征信息,并将二次目标图像或目标指纹与特征信息进行匹配。可以理解的,当第二采集单元120采集得到二次目标图像时,对应的特征信息为解锁图像信息,当第二采集单元120采集得到目标指纹时,对应的特征信息为解锁指纹信息。
S50、若匹配成功,则控制识别模块132输出匹配成功指令。
具体的,在本实施例中,当二次目标图像和解锁图像信息之间的各个特征点均匹配成功,识别模块132生成匹配成功指令。后续的,该匹配成功指令可以输出至控制器,以使得控制器控制门锁解开。同样地,当目标指纹和解锁指纹信息之间的各个特征点均匹配成功,识别模块132也会生成匹配成功指令并输出至控制器,以使得控制器控制门锁解开。
本申请提供的识别方法,通过第一采集单元110在预设范围内采集得到目标信息,并在唤醒模块131采集得到目标信息后发出激活指令以激活识别模块132。进而通过第二采集单元120基于目标信息采集得到二次目标信息,并控制识别模块132调用预存的特征信息,并将二次目标信息和特征信息进行匹配,在匹配成功输出匹配成功指令解锁。本申请第一采集单元110能够在低功耗待机状态下采集目标信息,并先通过低功耗进行目标信息采集后,再唤醒深度识别,使得能够在实现识别功能的同时,实现待机的低功耗以及实现解锁的便利性和安全性。
一种实施例请参见图6,在步骤S10“控制唤醒模块131通过第一采集单元110在预设范围内采集目标信息”之前,本方法还包括步骤:
S5、控制预探测模块134探测到生物信息,并发出预探测信号。
具体的,对应到识别系统100还包括预探测模块134的实施例。通过利用功耗更低的预探测模块134工作,避免了唤醒模块131处于长期工作的状态,进而进一步降低本申请识别方法的功耗。
在一种实施例中,预存的唤醒信息为多个,且对于本申请提供的识别方法中的步骤S20“控制唤醒模块131调用预存的唤醒信息,并将获取到的目标信息和唤醒信息进行匹配”,包括:
S21、控制唤醒模块131逐个调用预存的唤醒信息;
S22、控制唤醒模块131将获取到的目标信息与唤醒信息逐个进行匹配。
具体的请参见图7,在本实施例中,在存储器133中预存的唤醒信息的数量不止为一个,且多个唤醒信息需要逐个进行调用,且当唤醒模块131接收到目标信息后,需要将目标信息与预存的唤醒信息进行逐个匹配,且需要当目标信息与多个唤醒信息均匹配成功后,识别模块132才可以生成激活指令,这样能够增加识别系统100的安全性。
在一种实施例中,预存的特征信息为多个,且对于本申请提供的识别方法中的步骤S50“控制识别模块132调用预存的特征信息,并将二次目标信息和特征信息进行匹配”,包括:
S51、控制识别模块132逐个调用预存的特征信息;
S52、控制识别模块132将获取到的二次目标信息与特征信息逐个进行匹配。
具体的请参见图8,在本实施例中,在存储器133中预存的特征信息的数量也不止为一个,且多个特征信息需要逐个进行调用,当识别模块132接收到二次目标信息后,需要将二次目标信息与多个特征信息进行逐个匹配,且需要当二次目标信息与多个特征信息均匹配成功后,才可以生成匹配成功指令,以增加识别系统100的安全性。
在一种实施例中,第一采集单元110为第一摄像头,第二采集单元120为第二摄像头,对于本申请提供的识别方法中的步骤S30“控制唤醒模块131向识别模块132发出激活指令”,包括:
S31、控制唤醒模块131向识别模块132发出激活指令,且激活指令中包含有对应目标信息的位置信息;
然后,对于本申请提供的识别方法中的步骤S40“控制识别模块132通过第二采集单元120基于目标信息采集得到二次目标信息”,包括:
S41、控制识别模块132基于位置信息识别目标信息的方位;
S42、控制识别模块132通过第二摄像头基于目标信息的方位采集二次目标信息。
具体的请参见图9,在本实施例中,为保证第二摄像头能够准确地对第一采集单元110采集到的目标信息进行准确地深度识别,因此需要在采集目标信息的同时,识别目标信息的方位。可以理解的,当第一摄像头采集得到目标图像信息时,目标图像信息上带有目标图像信息的位置信息,当目标图像信息与唤醒图像信息匹配成功后,第二摄像头可以根据目标图像信息的方位对目标图像信息进行深度识别,进而能够得到基于目标图像信息的二次目标图像。当射频接收器采集得到目标射频信号时,目标射频信号上会带有发射目标射频信号的设备的位置信息,此时第二摄像头对该设备的携带者进行深度识别,得到基于目标射频信号的二次目标图像。
以上是本发明实施例的实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明实施例原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
- 局部区域实时自差分位置识别系统,以及应用该定位系统的移动站位置识别方法和终端位置识别系统
- 病理编号识别方法、信息识别方法、装置及信息识别系统