供给器、医疗设备以及医疗设备的安装方法
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及用于对体内的目标组织进行处置的供给器、医疗设备(更详细地讲是为了对组织进行结扎而使用的结扎装置)、以及该医疗设备的安装方法。
背景技术
以往,为了对形成于体内的目标组织的开口、血管等进行结扎,已知有专利文献1所记载的那样的、经由内窥镜的通道导入到患者体内的内窥镜用处置器具。
专利文献1所记载的内窥镜用处置器具具有:管状的外护套;管状的内护套,其贯穿于外护套;驱动线,其贯穿于内护套;连结钩,其连接于驱动线的远位端,能够把持夹具;基体部,其连接于内护套的近位端;以及滑动件部,其连接驱动线的近位端,并且能够相对于基体部进行滑动。基体部具有形成有两个定位槽的固定基体和形成有一个定位槽的旋转基体。
在专利文献1所记载的内窥镜用处置器具中,具有连结钩开脚的夹具开放位置、使被连结钩把持的夹具进行紧固动作的夹具紧固位置、以及使连结钩闭脚而把持夹具且未使夹具进行紧固动作的夹具连结位置这三个位置。
具体而言,夹具开放位置是从基体部最大程度地拉出滑动件的位置,夹具紧固位置是相对于基体部最大程度地推入滑动件的位置,夹具连结位置是设定于夹具开放位置和夹具紧固位置之间的位置。换言之,在专利文献1所记载的内窥镜用处置器具中,在使滑动件相对于基体部移动到最靠顶端侧的位置时,连结钩自内护套的顶端突出,能够利用自身的弹性力开脚。
专利文献1:日本特开2012-200518号公报
发明内容
一般而言,用于对体内的目标组织进行处置(结扎)的医疗设备是通过连结插入到体内的处置器具(例如夹具)和用于在操作者的近前调整处置部的位置和姿势的供给器而构成的。在使用这样的医疗设备对体内的目标组织进行处置时,例如有时对在手术前的检查中没能发现的新的目标组织进行追加处置。作为一例,例如在使用夹具作为处置器具的情况下,为了对多个目标组织分别进行结扎,需要更换多个夹具。换言之,在用于对体内的目标组织进行处置的医疗设备中,优选能够将新的处置器具安装于供给器,所谓的重新安装处置器具。
另一方面,当在体内对一个目标组织进行处置时,例如在使用被用作处置器具的夹具错误地把持意料之外的组织的情况或者欲调整把持目标组织的状态的情况下,有时需要进行在一度解除了由处置器具把持组织的把持状态之后重新把持目标组织的、所谓的处置器具的重新抓取操作。
因此,为了恰当地对体内的目标组织进行处置,优选的是,医疗设备能够兼顾能够重新安装处置部和处置器具重新抓取目标组织。
在专利文献1所记载的内窥镜用处置器具中,如上所述,在移动到作为从基体部最大程度地拉出滑动件的位置的夹具开放位置时,连结钩开脚。因此,在专利文献1所记载的内窥镜用处置器具中,在夹具开放位置能够在连结钩上安装不同的夹具,所谓的能够重新安装夹具。
在专利文献1所记载的内窥镜用处置器具中,在对体内的目标组织进行处置时,为了调整由夹具把持目标组织的把持状态,需要使滑动件从夹具连结位置相对于基体部向顶端侧进行移动。然而,通过这样的移动,存在内窥镜用处置器具移动到夹具开放位置、解除夹具与连结钩的连结状态的可能性。即,专利文献1所记载的内窥镜用处置器具存在这样的问题:未考虑由处置器具重新抓取目标组织,不能兼顾处置器具的重新安装化和由处置器具重新抓取目标组织。
本发明是鉴于这样的问题而完成的,其目的在于提供实现兼顾处置器具的重新安装化和利用处置器具重新抓取目标组织的供给器及医疗设备(更详细而言是结扎装置)。此外,本发明的另一个目的在于提供一种安装该医疗设备的处置器具的方法。
本发明的第一技术方案的医疗设备包括:夹具单元,其具有第1臂、第2臂及第1连接件;以及供给器,其具有用于操作所述夹具单元的操作线,所述供给器包括:第2连接件,其设于所述操作线,能转变为解除了与所述第1连接件的卡合的解除形态和与所述第1连接件卡合的卡合形态;护套,其能够收纳所述操作线和所述第2连接件;第1操作部,其连接于所述操作线,通过进退动作而使所述第2连接件进行移动;以及第2操作部,其用于调整从所述第1操作部到所述第2连接件的距离,在所述第2连接件位于所述护套内时,所述第2连接件的所述卡合形态和所述解除形态之间的转变被所述护套所限制,在所述第2连接件自所述护套突出时,能够进行所述第2连接件的从所述解除形态向所述卡合形态的转变,所述第2操作部通过与所述第1操作部的所述进退动作不同的动作,能够将从所述第1操作部到所述第2连接件的所述距离从第1距离变更为第2距离。所述第1距离定义为所述第1操作部最大程度地前进且所述第2连接件自所述护套突出的状态下的从所述第1操作部到所述第2连接件的所述距离。所述第2距离定义为所述第1操作部最大程度地前进且所述第2连接件位于所述护套内的状态下的从所述第1操作部到所述第2连接件的所述距离。
根据本发明的第二技术方案,在上述的第一技术方案的医疗设备中,也可以是,在所述第1连接件和所述第2连接件是所述卡合形态且从所述第1操作部到所述第2连接件的所述距离是所述第2距离的状态下,在所述第1操作部处于最大程度地前进了的位置时,至少连结所述第1连接件与所述第2连接件的连结部位于所述护套内。
根据本发明的第三技术方案,在上述的第一技术方案的医疗设备中,也可以是,所述夹具单元具有压管,该压管形成为筒状,能够供所述第1臂和所述第2臂插入,所述第1连接件连结于所述第1臂和所述第2臂,而且配置于自所述压管突出的位置。
根据本发明的第四技术方案,在上述的第一技术方案的医疗设备中,也可以是,在所述第1连接件和所述第2连接件是所述卡合形态且从所述第1操作部到所述第2连接件的所述距离是所述第2距离的状态下,在所述第1操作部处于最大程度地前进了的位置时,所述压管与所述护套接触。
根据本发明的第五技术方案,在上述的第一技术方案的医疗设备中,也可以是,所述供给器还包括限制部,该限制部用于限制通过所述第2操作部的操作而使从所述第1操作部到所述第2连接件的所述距离变更。
根据本发明的第六技术方案,在上述的第一技术方案的医疗设备中,也可以是,所述第2操作部通过调整连结所述第1操作部和所述第2连接件的所述操作线的长度,将从所述第1操作部到所述第2连接件的所述距离从所述第1距离变更为所述第2距离。
根据本发明的第七术方案,在上述的第六技术方案的医疗设备中,也可以是,所述第2操作部具有供至少所述操作线的一部分卷绕的旋转构件,通过所述旋转构件的旋转动作将所述操作线卷绕于所述旋转构件。
根据本发明的第八技术方案,在上述的第七技术方案的医疗设备中,也可以是,所述供给器还包括限制部,该限制部通过限制所述旋转构件的所述旋转动作来限制从所述第1操作部到所述第2连接件的所述距离变更。
根据本发明的第九技术方案,在上述的第一技术方案的医疗设备中,也可以是,所述第2操作部具有能够相对于所述第1操作部移动地卡合于该第1操作部的滑动构件,所述操作线固定于所述第2操作部的所述滑动构件。
根据本发明的第十技术方案,在上述的第九技术方案的医疗设备中,也可以是,所述滑动构件具有卡定于所述第1操作部的突起,所述突起设于这样的位置,即在通过所述滑动构件相对于所述第1操作部进行移动而使从所述第1操作部到所述第2连接件的所述距离变更为所述第2距离的状态下,该突起卡定于所述第1操作部。
本发明的第十一技术方案的供给器与具有第1臂和第2臂的夹具单元连结,其中,所述供给器包括:操作线,其用于操作所述夹具单元;连接件,其设于所述操作线,能转变为解除了与所述夹具单元的卡合的解除形态和与所述夹具单元卡合的卡合形态;护套,其能够收纳所述操作线和所述连接件;第1操作部,其连接于所述操作线,通过进退动作使所述连接件进行移动;以及第2操作部,其用于调整从所述第1操作部到所述第2连接件的距离,在所述连接件位于所述护套内时,所述连接件的所述卡合形态和所述解除形态之间的转变被所述护套所限制,在所述连接件自所述护套突出时,能够进行所述连接件的从所述解除形态向所述卡合形态的转变,所述第2操作部通过与所述第1操作部的所述进退动作不同的动作,能够将从所述第1操作部到所述连接件的所述距离从第1距离变更为第2距离,所述第1距离定义为所述第1操作部最大程度地前进且所述连接件自所述护套突出的状态下的从所述第1操作部到所述连接件的所述距离,所述第2距离定义为所述第1操作部最大程度地前进且所述连接件位于所述护套内的状态下的从所述第1操作部到所述连接件的所述距离。
根据本发明的第十二技术方案,在上述的第十一技术方案的供给器中,也可以是,所述第2操作部通过调整连结所述第1操作部和所述连接件的所述操作线的长度,将从所述第1操作部到所述第2连接件的所述距离从所述第1距离变更为所述第2距离。
根据本发明的第十三技术方案,在上述的第十一技术方案的供给器中,也可以是,所述供给器还包括限制部,该限制部用于限制通过所述第2操作部的操作而使从所述第1操作部到所述第2连接件的所述距离变更。
本发明的第十四技术方案的医疗设备的安装方法是所述医疗设备的夹具单元的安装方法,该医疗设备包括:所述夹具单元,其具有第1臂、第2臂及第1连接件;操作线,其用于操作所述夹具单元;第2连接件,其设于所述操作线,能转变为解除了与所述第1连接件的卡合的解除形态和与所述第1连接件卡合的卡合形态;护套,其能够收纳所述操作线和所述第2连接件;第1操作部,其连接于所述操作线,通过进退动作使所述第2连接件进行移动;以及第2操作部,其用于调整从所述第1操作部到所述第2连接件的距离,其中,在所述安装方法中,将在所述第1操作部最大程度地前进且所述第2连接件自所述护套突出的状态下从所述第1操作部到所述第2连接件的所述距离定义为第1距离,将在所述第1操作部最大程度地前进且所述第2连接件位于所述护套内的状态下从所述第1操作部到所述第2连接件的所述距离定义为第2距离,该安装方法具有以下的步骤:通过利用与所述第1操作部的所述进退动作不同的动作操作所述第2操作部,将从所述第1操作部到所述第2连接件的所述距离从所述第2距离变更为所述第1距离;使所述第1操作部移动到最大程度地前进了的位置;以及通过利用与所述第1操作部的所述进退动作不同的动作操作所述第2操作部,将从所述第1操作部到所述第2连接件的所述距离从所述第1距离变更为所述第2距离。
根据本发明的第十五技术方案,在上述的第十四技术方案的安装方法中,也可以是,通过利用与所述第1操作部的所述进退动作不同的动作操作所述第2操作部,调整所述操作线在所述第1操作部和所述第2连接件之间的长度,从而将从所述第1操作部到所述第2连接件的所述距离在所述第1距离和所述第2距离之间变更。
根据本发明的第十六技术方案,在上述的第十四技术方案的安装方法中,也可以是,在使所述第1操作部移动到最大程度地前进了的位置之后操作所述第2操作部,将从所述第1操作部到所述第2连接件的所述距离从所述第2距离变更为所述第1距离,使所述第2连接件与所述第1连接件卡合。
根据本发明的第十七技术方案,在上述的第十四技术方案的安装方法中,也可以是,在操作所述第2操作部使从所述第1操作部到所述第2连接件的所述距离从所述第2距离变更为所述第1距离之后使所述第1操作部移动到最大程度地前进了的位置,使所述第2连接件与所述第1连接件卡合。
根据医疗设备及供给器的上述各技术方案,能够实现兼顾处置器具的重新安装化和利用处置器具重新抓取目标组织。此外,根据该医疗设备的夹具单元的安装方法的上述各技术方案,通过使夹具单元卡合于供给器,能够将其恰当地安装于医疗设备。
附图说明
图1是示意地表示本发明的第1实施方式的夹具单元的结构的立体图。
图2是示意地表示本实施方式的夹具单元的臂构件的结构的立体图。
图3A是本实施方式的夹具单元的侧视时的局部剖视图。
图3B是本实施方式的夹具单元的俯视时的局部剖视图。
图4A是本实施方式的处置器具主体的俯视时的局部剖视图。
图4B是本实施方式的处置器具主体的侧视时的局部剖视图。
图5A是示意地表示本实施方式的夹具壳的结构的立体图。
图5B是表示本实施方式的夹具单元收纳于夹具壳的样态的立体图。
图5C是表示本实施方式的夹具壳的下部壳体的构造的俯视图。
图5D是本实施方式的夹具壳的侧视时的局部剖视图。
图6A是表示在本实施方式的处置器具主体安装夹具单元的操作的图。
图6B是表示在本实施方式的处置器具主体安装夹具单元的操作的图。
图6C是表示在本实施方式的处置器具主体安装夹具单元的操作的图。
图6D是表示在本实施方式的处置器具主体安装夹具单元的操作的图。
图6E是表示在本实施方式的处置器具主体安装夹具单元的操作的图。
图6F是表示在本实施方式的处置器具主体安装夹具单元的操作的图。
图7A是表示本实施方式的处置器具主体与夹具单元的连结构造的立体图。
图7B是表示本实施方式的处置器具主体与夹具单元的连结构造的俯视图。
图8是表示使用本实施方式的医疗设备对目标组织进行处置的操作的图。
图9是表示使用本实施方式的医疗设备对目标组织进行处置的操作的图。
图10是表示使用本实施方式的医疗设备对目标组织进行处置的操作的图。
图11A是表示使用本实施方式的医疗设备对目标组织进行处置的操作的图。
图11B是表示使用本实施方式的医疗设备对目标组织进行处置的操作的图。
图12A是示意地表示本发明的第2实施方式的医疗设备的结构的局部剖视图。
图12B是示意地表示本实施方式的医疗设备的供给器的结构的放大剖视图。
图12C是沿着图12B中的XIIC-XIIC从医疗设备的基端侧观察到的供给器的径向剖视图。
图12D是示意地表示本实施方式的医疗设备的操作部的局部的结构的立体图。
图13A是表示使用本实施方式的医疗设备对目标组织进行处置的操作的图。
图13B是表示使用本实施方式的医疗设备对目标组织进行处置的操作的图。
图13C是表示使用本实施方式的医疗设备对目标组织进行处置的操作的图。
图14是表示使用本实施方式的医疗设备对目标组织进行处置的操作的图。
图15A是表示使用本实施方式的医疗设备对目标组织进行处置的操作的图。
图15B是表示使用本实施方式的医疗设备对目标组织进行处置的操作的图。
图15C是表示使用本实施方式的医疗设备对目标组织进行处置的操作的图。
具体实施方式
(第1实施方式)
以下,参照图1~图11说明本发明的一实施方式的医疗设备的结构。
本实施方式的医疗设备1穿过形成于未图示的内窥镜的通道插入到患者的体内来使用。更详细而言,本实施方式的医疗设备1是用于对体内的目标组织进行结扎的结扎装置。
在本说明书中,将供操作者操作内窥镜的内窥镜操作部所处的一侧定义为基端侧,将内窥镜的插入到体内的顶端部所处的一侧定义为顶端侧。
本实施方式的医疗设备1构成为包括设于顶端侧的夹具单元(处置器具)10和处置器具主体(供给器)30(参照图8)。以下,为了便于说明,将夹具单元10简称为夹具10。如图8所示,夹具10能够拆卸地连结于后述的处置器具主体30的顶端部。
(夹具10的结构)
图1是本实施方式的夹具10的立体图。图2是本实施方式的夹具10的臂构件11的立体图。图3A是臂构件11的俯视时的局部剖视图。图3B是臂构件11的侧视时的局部剖视图。
如图1所示,本实施方式的夹具10构成为包括臂构件11、压管31以及连结构件(第1连接件)3。
在本说明书中,如图3B所示,定义夹具10的臂构件11的第一臂12和第二臂13相对的相对方向X、与压管31的轴线C1平行的轴线方向Y、以及与相对方向X和轴线方向Y分别正交的正交方向Z。此外,为了便于说明,后述的插入部60的轴线C1视为夹具10的轴线。
臂构件11具有第一臂12、第二臂13以及中间部14。第一臂12和第二臂13从基端侧朝向顶端侧延伸,并且彼此相对地配置。中间部14位于第一臂12的基端部和第二臂13的基端部之间。在本实施方式中,也可以如图1A所示,第一臂12和第二臂13形成在相对于轴线C1线对称的位置。
在本实施方式中,第一臂12和第二臂13在自然状态下具有相互分开且沿着从基端侧朝向顶端侧的方向相互之间的距离变大的弹性恢复力。在本说明书中,“自然状态”是指不对臂构件11作用外力的状态。在第一臂12的顶端部形成有朝向第二臂13侧延伸的爪12a。在第二臂13的顶端部形成有朝向第一臂12侧延伸的爪13a。
在本实施方式中,臂构件11例如通过如下这样形成:在通过将不锈钢等的板簧构件等的金属材料弯折而形成第一臂12和第二臂13之后,使第一臂12和第二臂13交叉。臂构件11通过这样构成,在被拉入到压管31内时能够沿着压管31的内周面进行滑动。
在臂构件11的中间部14中形成有一对突起16、17。更具体而言,一对突起16、17与臂构件11的第一臂12和第二臂13延伸的长度方向正交地突出。一对突起16、17也可以形成于相对于轴线C1线对称的位置。通过形成夹具10的一对突起16、17,如后所述在臂构件11被拉入到压管31内时,一对突起16、17嵌入压管31的比台阶部31b靠基端侧的内壁,从而能够限制臂构件11相对于压管31的移动(前进)。
在本实施方式中,压管31形成为圆筒状,具有能够供臂构件11的基端部进入的内径。即,在压管31形成有能够供臂构件11的第一臂12和第二臂13进入的管腔。此外,后述的连结构件3的至少一部分也能够进入到形成于压管31的管腔。在本实施方式中,形成有自压管31的内壁向压管31的径向内侧突出的台阶部31b。压管31形成为具有位于台阶部31b的顶端侧的大径部31c和位于台阶部31b的基端侧的小径部31d。即,在压管31中,大径部31c的内径大于小径部31d的内径。在本实施方式中,压管31的大径部31c具有能够供臂构件11的一对突起16、17进退自如地进入的程度的内径。并且,压管31的小径部31d具有比臂构件11的形成有一对突起16、17的部位的宽度小的内径。因此,像后述那样,在臂构件11被拉入到压管31内而位于比台阶部31b靠基端侧的位置时,通过臂构件11的一对突起16、17嵌入压管31的小径部31d的内壁来限制臂构件11相对于压管31向顶端侧的移动。
此外,在本实施方式中,压管31的外径形成得比后述的插入部60的护套66的内径大。
包含臂构件11在内构成夹具10的这些构件例如由钴铬合金、钛、不锈钢等材料形成。夹具10构成为也能够在MRI(核磁共振成像法)透视下进行观察。
臂构件11例如通过如下这样一体地形成:将由钴铬合金等形成的板材冲裁为将第一臂12和第二臂13、中间部14、一对突起16、17展开为平面状而成的形状。
臂构件11的第一臂12和第二臂13具有向各自的顶端相互分开的方向、即臂构件11打开的方向进行移动的弹性恢复力。
如图3A和图3B所示,在压管31的顶端部的内壁的整周范围内形成有锥形面31a。锥形面31a随着朝向顶端侧去而扩径。在本实施方式中,压管31和卡定部32例如也可以由64钛合金(Ti-6AL-4V)、钴铬合金等材料一体地形成。
(连结构件3的结构)
在本实施方式中,如图3A和图3B所示,连结构件(第1连接件)3形成为具有顶端部3a、细径部3b、钩部3c、中径部3d、大径部3e、缺口部3g、基端部3f以及突起部3h。使用具有预定的强度的树脂材料通过注射成形等方法形成连结构件3。
在本实施方式中,连结构件3是为了连结夹具10的臂构件11和后述的操作线62而构成的。连结构件3的顶端部3a是为了支承用于连结臂构件11的钩部3c而构成的,其形状没有特别的限制。钩部3c形成为自顶端部3a沿与连结构件3延伸的长度方向正交的方向突出,通过该钩部3c勾住形成于臂构件11的中间部14的环,能够将臂构件11连结于连结构件3。细径部3b形成为连结于顶端部3a的基端侧。细径部3b是连结构件3中的外径最小的部分,通过施加预定以上的操作力量,细径部3b断裂。在本实施方式中,例如在对细径部3b施加20牛顿~60牛顿的拉伸力量时,细径部3b断裂。中径部3d和大径部3e的外径形成得比细径部3b的外径大,是连结连结构件3的顶端部3a和基端部3f的部分。在本实施方式中,由于中径部3d的外径和大径部3e的外径为压管31的内径以下,因此连结构件3在相对于压管31进行移动时能够进入到压管31内。
在本实施方式中,如图3A所示,连结构件3的基端部3f形成为从顶端侧朝向基端侧分支成两支。更具体而言,基端部3f由分开的一对臂形成。如图1所示,在基端部3f的一对臂之间形成有孔,该孔具有能够供形成于后述的操作线62的顶端的形成为箭头状的钩62a(参照图4A)进入的程度的尺寸。例如在钩62a插入到形成于基端部3f的孔时,通过钩62a的外周面抵接并按压于上述的孔的内周面,基端部3f的一对臂分别向连结构件3的长度轴线方向的外侧弹性变形。因此,钩62a能够穿过形成于基端部3f的孔进入到后述的缺口部3g。
如图3A所示,基端部3f通过其一部分被去除而形成缺口部3g。缺口部3g具有在后述的钩62a能够经由形成于基端部3f的孔进入的状态下能够容纳钩62a的程度的尺寸。
在连结构件3的大径部3e的外周面形成有突起部3h。连结构件3在形成有突起部3h的位置能够与压管31卡合。连结构件3通过这样构成,能够限制在臂构件11的弹性恢复力的作用下连结构件3相对于压管31进行移动。
(处置器具主体30的结构)
接下来,说明本实施方式的处置器具主体(供给器)30的结构。
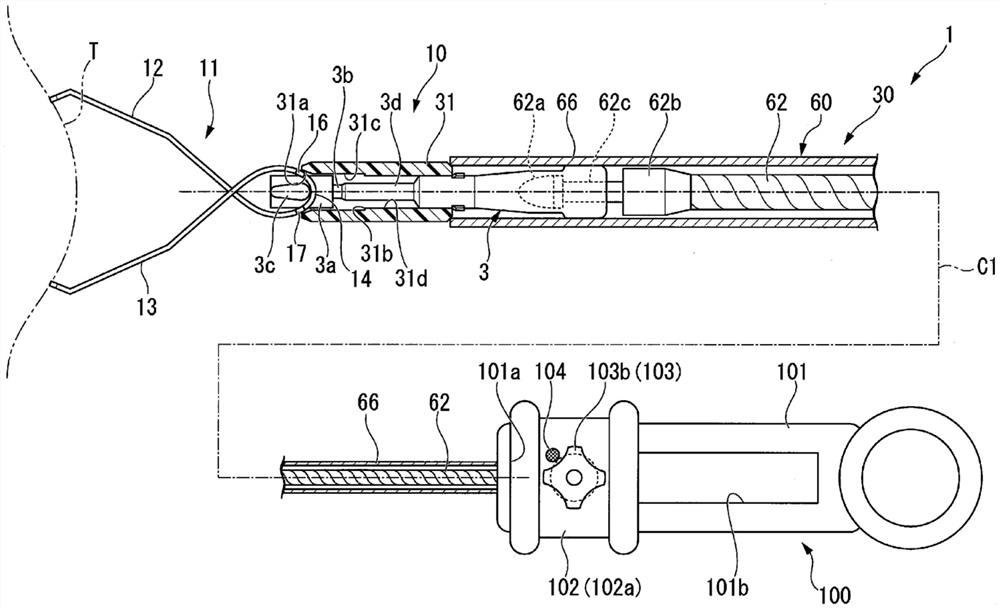
如图4A和图4B所示,本实施方式的处置器具主体30构成为具有插入部60和操作部100。
插入部60位于比操作部100靠顶端侧的位置,连结于操作部100的顶端。另一方面,操作部100安装于插入部60的基端部。
(插入部60的结构)
处置器具主体30的插入部60包括护套66和操作线(线构件)62。操作线62能够进退地贯穿于护套66内。操作线62是为了将操作者用于操作基端侧的操作部100的(例如推入滑动件102的操作和拉回滑动件102的操作)力量传递到夹具10而设置的。
护套66例如也可以是由抗压缩强度较高的SUS301等不锈钢形成的线圈护套。在该情况下,护套66可以使用将未图示的线材沿轴线方向Y密圈地卷绕而形成的线圈。护套66具有挠性,并且针对轴线方向Y的压缩力较强。
在本实施方式中,护套66形成为具有如下程度的内径:在钩62a与连结构件3的缺口部3g以卡合的状态下位于护套66内时,连结构件3不能相对于钩62a进行转动。更具体而言,如图7A和图7B所示,在上述的状态下,只要连结构件3相对于钩62a向与轴线C1方向交叉的方向进行转动,不解除钩62a与连结构件3的卡合状态即可,并不是连结构件3相对于钩62a完全不转动这样的意思。
在本实施方式中,操作线62例如也可以由金属制的单线、捻线形成。操作线62构成为在顶端侧连结有钩(第2连接件)62a、轴部62c以及固定部62b。固定部62b例如是由不锈钢等金属材料形成的圆筒状的构件。操作线62通过各种公知的方法、例如粘接、焊接等方法固定于固定部62b。此外,钩62a与固定部62b利用形成为棒状的轴部62c进行连结。因此,在本实施方式中,操作线62与钩62a、固定部62b及轴部62c一体地形成。钩62a通过操作线62的进退动作而能够与操作线62一起进行进退动作。
钩62a形成为圆锥形状。如图7A和图7B所示,钩62a具有外周面,该外周面具有随着朝向顶端侧而外径逐渐减小的斜面形状。钩62a的基端面的外径在连结构件3的基端部3f不弹性变形的状态下比形成于基端部3f的孔的直径大。
即,在钩62a收纳于连结构件3的缺口部3g的状态下,仅通过操作线62的进退动作不会使钩62a自缺口部3g脱离。
(操作部100的结构)
如图4A和图4B所示,操作部100具有操作部主体(手柄)101、滑动件(第1操作部)102以及线调整构件(第2操作部)103。
操作部主体101安装于护套66的基端部。操作部主体101形成为沿轴线方向Y延伸的棒状,在其基端部设有勾指部101a。在操作部主体101形成有沿轴线方向Y延伸的狭缝101b。
滑动件102设为贯穿于操作部主体101。滑动件102能够相对于操作部主体101沿轴线方向Y进行滑动(前进移动和后退移动)。在本实施方式中,通过将滑动件102在轴线方向Y上前进操作或后退操作,使操作线62和固定于操作线62的顶端的钩62a前进或后退。此外,在操作线62与连结构件3连结的状态下,通过操作线62的前进操作或后退操作,夹具10的臂构件11能够与操作线62一起前进或后退。其结果,能够使臂构件11的一对第一臂12和第二臂13打开或者闭合。
滑动件102形成为圆筒状。在滑动件102的外周面的整周范围内形成有凹部102a。在滑动件102中按照从轴线方向Y上的顶端侧向基端侧的顺序依次形成有凸缘部102b、凹部102a以及凸缘部102c。一对凸缘部102b、102c在沿轴线方向Y观察时成为椭圆形状。由此,滑动件102变得易于握住,在将内窥镜夹具1的操作部100进行捆包时能谋求省空间化。
通过滑动件102卡合于操作部主体101的狭缝101b,限制了滑动件102相对于操作部主体101在轴线方向Y上的移动范围。
如图4A和图4B所示,在滑动件102的凹部102a中形成有限制部104和具有卷筒的形状的线调整构件(第2操作部)103。在本实施方式中,线调整构件103能够通过与后述的滑动件102的进退动作不同的动作来调整操作线62的设于滑动件102和连结于钩62a的固定部62b之间的长度。换言之,线调整构件103能够调整从滑动件102到钩62a的距离。
在本实施方式中,如图4A和图4B所示,在滑动件102前进至抵接于狭缝101b的顶端面101a且操作线62的一部分卷绕于轴部103a的状态下,钩62a位于比护套66的顶端侧的开口靠基端侧的位置。即,在该状态下,钩62a收纳于护套66内。此外,在操作线62未卷绕于轴部103a的状态下滑动件102移动到抵接于狭缝101b的顶端面101a的位置(最大程度地前进了的位置)时,至少钩62a自护套66的顶端侧的开口突出(参照图6C和图6D)。
如图4B所示,线调整构件(第2操作部)103具有形成为棒状的轴部103a和为了使轴部103a进行旋转而固定于轴部103a的旋钮103b。在本实施方式中,轴部103a既可以构成为插入到在操作部100的滑动件102的凹部102a形成的孔,也可以与滑动件102一体地形成。即,在本实施方式中,线调整构件103和滑动件102能够沿着轴线C1方向一体地进退。换言之,在本实施方式中,线调整构件103和滑动件102不会沿着轴线C1方向进行相对移动。
如图4B所示,操作线62的基端穿过形成于滑动件102的凸缘部102b的贯通孔固定于轴部103a。
线调整构件103的旋钮103b通过顺时针方向的旋转动作或者逆时针方向的旋转动作能够使轴部103a进行旋转。在本实施方式中,通过使旋钮103b向顺时针方向进行旋转,轴部103a也能够向顺时针方向进行旋转,将操作线62的一部分卷绕于轴部103a。此外,在本实施方式中,通过旋钮103b的逆时针方向的旋转动作,轴部103a也能够向逆时针方向进行旋转,将卷绕于轴部103a的操作线62放出。
在本实施方式中,通过轴部103a与旋钮103b一起进行旋转,能够调整操作线62的设于滑动件102(更具体而言是固定于滑动件102的线操作构件103的轴部103a)与连结于钩62a的固定部62b之间的长度。换言之,通过轴部103a与旋钮103b一起进行旋转,能够调整从滑动件102到钩62a的距离。
如图4A和图4B所示,在滑动件102的凹部102a中,在线调整构件103的旋钮103b附近设有用于限制旋钮103b的旋转动作的限制部104。在本实施方式中,限制部104的具体的结构没有特别的限定,但在不操作限制部104的状态下,能够限制旋钮103b的旋转动作。另一方面,通过推入限制部104,能够使旋钮103b进行旋转。更具体而言,通过操作者将限制部104推入至旋钮103b自滑动件102的表面的高度以下,旋钮103能够越过限制部104进行旋转。另一方面,在操作者解除对限制部104进行的按压时,限制部104通过自滑动件102的表面突出至与旋钮103b的高度相同程度的高度而抵接于旋钮103b,能够限制旋钮103b的顺时针的旋转或者逆时针的旋转。因此,通过在本实施方式的操作部100设置限制部104来防止在意料之外的时机对旋钮103b进行误操作。
(夹具壳40的结构)
接下来,使用图5A~图5D说明本实施方式的夹具壳40的结构。夹具壳40是为了在制造本实施方式的夹具10之后实际使用的过程中易于输送且防止被外部环境污染而构成的。
图5A是示意地表示本实施方式的夹具壳40的结构的立体图。图5B是示意地表示本实施方式的夹具壳40的结构的分解图。图5C是表示夹具壳40的下部壳体42的内部结构的俯视图。图5D是表示夹具壳40的结构的侧视时的剖视图。
如图5A和图5B所示,夹具壳40由具有相同的形状且具有相同的尺寸的上部壳体41和下部壳体42构成。上部壳体41和下部壳体42例如能够由具有一定的硬度且透明的各种公知的树脂材料形成。本实施方式的夹具壳40只要能够恰当地收纳夹具10且形成为操作者易于握持的大小即可,其形状没有特别的限制。例如也可以是,夹具壳40的长度形成为50毫米左右,宽度形成为10毫米~20毫米左右,而且厚度形成为5毫米左右。
如图5A所示,夹具壳40的上部壳体41和下部壳体42通过三组卡合爪35和卡合孔36相互对应地卡合进行连结。如夹具5B所示,在夹具壳40的上部壳体41与下部壳体42连结的状态下,能够在形成于后述的夹具收纳部33的内腔37的内部收纳夹具10的至少臂构件11,前述的夹具收纳部33形成于下部壳体42。
更具体而言,如图5B~图5D所示,夹具10的臂构件11以第一臂12和第二臂13相互分开的打开形态收纳于在下部壳体42的夹具收纳部33形成的内腔37。在夹具收纳部33中的、比内腔37靠基端侧的位置形成有槽38,该槽38具有能够收纳压管31和连结构件3的深度。并且,槽38形成为具有在钩62a欲从连结构件3的基端部3f进入到缺口部3g时能够供连结构件3的基端部3f弹性变形的程度的内径。
也可以如图5B所示,在夹具10收纳于夹具收纳部33内时,臂构件的第一臂12和第二臂13抵靠于内腔37的顶端面。
如图5A和图5B所示,在夹具壳40中的比夹具收纳部33靠基端侧的位置连续地形成有能够由操作者按压的压缩部34。压缩部34构成为具有在不作用外力的状态下相互隔开一定的距离地分开的一对腿34A、34B。更具体而言,压缩部34的一对腿34A、34B形成为在不作用外力的状态下相对于夹具壳40的长度轴线方向具有预定的角度地弯曲。即,压缩部34的一对腿34A、34B形成为在不作用外力的状态下随着从顶端侧朝向基端侧而相互间的距离依次扩大。
如图5B和图5C所示,压缩部34的一对腿34A、34B形成有与上述的槽38连续地形成的槽46和入口部45。槽46形成为在比槽38靠基端侧的位置具有比槽38大的内径。此外,槽46形成为模仿一对腿34A、34B的弯曲形状弯曲。
在本实施方式中,槽38形成为具有能够供上述的钩62a、固定部62b及轴部62c进入且不能供护套66进入的程度的内径。换言之,槽38形成为具有比钩62a、固定部62b及轴部62c各自的宽度大的内径。另一方面,槽46也可以形成为具有比钩62a、固定部62b、轴部62c及护套66各自的宽度大的内径。此外,如图5D所示,在槽38与槽46的交界形成有台阶部48。因此,像后述那样,在为了使钩62a和连结构件3卡合而将操作线62插入到夹具壳40的操作过程中,在护套66抵接于台阶部48的状态下,钩62a、固定部62b及轴部62c能够穿过槽46。
在压缩部34的一对腿34A、34B中形成有位于比槽46靠基端侧的位置的开口部45。如图5B和图5C所示,开口部45形成为从顶端侧朝向基端侧而内径依次扩大。开口部45通过这样构成,易于将操作线62插入到夹具壳40。
在压缩部34的一对腿34A、34B的外周面形成有多个半球状的凹部47。在本实施方式中,在操作者压缩压缩部34时,这些凹部47作为防滑件进行作用。此外,在压缩部34的一对腿34A、34B的外周面形成多个突部而替代多个半球状的凹部47的结构也具有相同的效果。
另外,如上所述,说明了本实施方式的夹具壳40的下部壳体42的结构,但由于上部壳体42具有与下部壳体42相同的结构,因此省略说明。
(将夹具10安装于操作部主体30的操作)
以下,参照图6A~图6E说明作为对体内的目标组织进行处置之前的准备将本实施方式的夹具10安装于操作部主体30的操作。
首先,如图6A所示,操作者向夹具壳40中插入处置器具主体30直到护套66抵接于夹具壳40的台阶部48为止。此时,操作线62的一部分卷绕于线调整构件103的轴部103a(参照图4B)。因此,如图6A所示,即使在操作部100的滑动件102抵接于狭缝101b的顶端面101a的状态下,钩62a也收纳于护套66的内部。此外,在线调整构件103中,旋钮103b的旋转动作被限制部104所限制。
接着,操作者通过把持形成于夹具壳40的基端侧的压缩部34的一对腿34A、34B将其压缩,使压缩部34弹性变形。如图6B所示,由于一对腿34A、34B之间的空间被压缩,因此护套66在被一对腿34A、34B把持的状态下不能沿着轴线C1方向进行进退移动。
在该状态下,与图6A所示的状态同样,钩62a收纳于护套66的内部。在操作部100中,旋钮103b的旋转动作被限制部104所限制,操作线62的一部分卷绕于线调整构件103的轴部103a。
接着,如图6C所示,操作者推入线调整构件103的限制部104,并且使旋钮103b逆时针地进行旋转。通过推入线调整构件103的限制部104,解除由限制部104对旋钮103b的旋转动作进行的限制,操作者能够操作旋钮103b使其进行旋转。在本实施方式中,操作者使线调整构件103的旋钮103b逆时针地进行旋转的角度没有特别的限定。例如也可以是,操作者推入线调整构件103的限制部104,并且使旋钮103b逆时针地旋转预定的角度(例如90度)。此时,线调整构件103的轴部103a通过与旋钮103b一起逆时针地进行旋转,将卷绕于轴部103a的操作线62的一部分放出。此外,在本实施方式中,例如也可以在操作者使旋钮103b逆时针地旋转90度时,将卷绕于轴部103a的操作线62放出几毫米左右。此时,如图6D所示,是在线调整构件103的轴部103a处操作线62大致未卷绕的状态。
通过操作者的上述操作,设于操作线62的顶端侧的钩62a与操作线62一起前进,自护套66的顶端侧的开口突出。并且,钩62a穿过形成于连结构件3的基端部3f的孔进入到连结构件3的缺口部3g。其结果,如图6C所示,钩62a卡合于连结构件3的缺口部3g,操作线62和夹具10利用连结构件3进行连结。此时,连结操作线62和夹具10的连结构件3自护套66的顶端侧的开口突出。
在操作者推入限制部104并且使旋钮103b逆时针地进行旋转的过程中,旋钮103b能够越过限制部104。此时,在操作者解除对限制部104进行的按压时,如图6D所示,限制部104自滑动件102的表面突出并抵接于旋钮103b。因此,在操作者不操作限制部104时,限制了旋钮103b的顺时针的旋转。换言之,维持连结操作线62和夹具10的连结构件3自护套66的顶端侧的开口突出的状态。
如图6C所示,在滑动件102抵接于狭缝101b的顶端面101a(即,滑动件102处于最大程度地前进了的位置)且钩62a自护套66突出的状态下,将从滑动件102的顶端面到钩62a的顶端的距离定义为从滑动件102到钩62a的第1距离。在该状态下,将操作线62的从设于滑动件102的凹部102a的轴部103a到连结于钩62a的固定部62b的长度定义为操作线62的第1长度。
为了便于说明,说明了在滑动件102沿着狭缝101b前进至抵接于狭缝101b的顶端面101a的位置时钩62a卡合于连结构件3的缺口部3g的例子,但本发明并不限定于此。例如也可能是,在滑动件102沿着狭缝101b前进至抵接于狭缝101b的顶端面101a的位置的过程中,在滑动件102抵接于顶端面101a之前钩62a进入到连结构件3的缺口部3g并与其卡合。此时,在钩62a进入到连结构件3的缺口部3g并与其卡合时,能够将操作部100的滑动件102处于狭缝101b的位置视为滑动件102最大程度地前进了的位置。
如图7A和图7B所示,在连结操作线62和夹具10的连结构件3位于护套66的外部时,连结构件3能够沿着箭头D所示的方向在与轴线C1方向交叉的方向上旋转。此外,在连结构件3以位于护套66的外部的状态在与轴线C交叉的方向上进行旋转时,钩62a能够从连结构件3的缺口部3g的侧方拔出。另一方面,护套66形成为具有如下程度的内径:在操作线62和连结构件3以设于操作线62的顶端的钩62a与连结构件3的缺口部3g卡合的状态位于护套66内时连结构件3不能相对于钩62a进行转动。换言之,在连结夹具10和操作线62的连结构件3位于护套66内时,利用护套66维持夹具10与操作线62的卡合状态。
通过本实施方式的夹具10及处置器具主体30具有上述的结构,能够容易地自处置器具主体30拆下使用完毕的夹具10,更换其他的夹具10。另一方面,在夹具10安装于处置器具主体30且连结构件3自护套66的顶端侧的开口突出的状态下,存在夹具10意料之外地自处置器具主体30脱落的可能性。
为了防止夹具10意料之外地自处置器具主体30脱落,如图6E所示,通过操作者在将夹具10安装于处置器具主体30之后操作设于滑动件102的线调整构件103,能够将连结构件3的至少一部分收纳于护套66的内部。
更具体而言,如图6E所示,操作者通过推入线调整部103的限制部104并且使旋钮103b顺时针地进行旋转,能够使线调整部103的轴部103a顺时针地进行旋转。通过操作者使旋钮103b顺时针地进行旋转的操作,操作线62的一部分卷绕于线调整部103的轴部103a,设于操作线62的顶端部的钩62a和卡合于钩62a的连结构件3相对于护套66向基端侧进行移动。即,卡合于操作线62的夹具10相对于护套66向基端侧进行移动。在该过程中,操作部100的滑动件102维持在抵接于狭缝101b的顶端面101a的最大程度地前进了的位置。
如图6E所示,在本实施方式中,通过操作者使旋钮103b顺时针地进行旋转的操作,至少连结构件3移动到比护套66的顶端侧的开口靠基端侧的位置。换言之,至少连结构件3收纳于护套66内。在图6E中示出了压管31的基端面位于比护套66的顶端面靠顶端侧的位置并分开的例子,但压管31的基端面也可以抵接于护套66的顶端面。
在该状态下,由于滑动件102抵接于狭缝101b的顶端面101a,因此其不能进一步前进。因此,连结于操作线62且收纳于护套66内的钩62a和连结构件3不会自护套66的顶端侧开口突出。即,在本实施方式中,通过维持从滑动件102到钩62a的距离是第2距离的状态,能够防止夹具10自处置器具主体30意料之外的脱落。
如上所述,说明了操作者使旋钮103b顺时针地进行旋转的例子,但本发明并不限定于此。例如在操作者推入线调整部103的限制部104时,解除由限制部104对旋钮103b的顺时针的旋转动作进行的限制。因此,也可以是,旋钮103b自动地向顺时针方向进行旋转,恢复为图4A所示的初始状态。
在图6E所示的状态下,能够从操作者推压限制部104的位置返回到初始的位置(状态)。也就是说,限制部104成为自滑动件102的凹部102a突出的位置,能够再次限制线调整构件103的旋钮103b的旋转动作。其结果,操作线62不会进一步卷绕于线长调整部103的轴部103a。
如图6E所示,在滑动件102处于抵接于狭缝101b的顶端面101a的位置且钩62a和连结构件3的缺口部3g的卡合部收纳于护套66内的状态下,将从滑动件102的顶端面到钩62a的顶端的距离定义为从滑动件102到钩62a的第2距离。在该状态下,将操作线62的从设于滑动件102的凹部102a的轴部103a到连结于钩62a的固定部62b的长度定义为操作线62的第2长度。在本实施方式中,第2距离和第2长度分别小于上述的第1距离和第1长度。
在本实施方式中,与使滑动件102进退的操作不同,通过操作者使线调整构件103的旋钮103b顺时针地进行旋转,能够将操作线62的从线调整构件103的轴部103a到连结于钩62a的固定部62b的长度从第1长度变更为第2长度。换言之,通过线调整构件103的旋钮103b的旋转动作,能够将从滑动件102到钩62a的距离从第1距离变更为第2距离。其结果,像后述那样,能够将钩62a与连结构件3的卡合部收纳于护套66内部,能够维持钩62a与连结构件3的卡合状态。
之后,如图6F所示,在维持着夹具10与操作线62卡合的状态下,操作者解除相对于夹具壳40的压缩部34压缩的力,把持操作部100从夹具壳40拔出处置器具主体30的安装有夹具10的插入部60。在该过程中,操作者无需向基端侧拉回滑动件102。即,维持滑动件102抵接于狭缝101b的顶端面101a的状态。另外,压管31的基端面抵接于护套66的顶端面。
这样,能够将本实施方式的夹具10安装于处置器具主体30。
(利用医疗设备1进行的手术)
以下,参照图8~图11说明使用具有上述的结构的本实施方式的医疗设备1对目标组织T进行结扎的手术。
如图8所示,在将夹具10以安装于处置器具主体30的状态从夹具壳40取出时,夹具10的臂构件11的第一臂12和第二臂13在自身的弹性恢复力的作用下成为相互分开的打开形态。在该状态下,在基端侧的操作部100中,滑动件102处于抵接于狭缝101b的顶端面101a的最大程度地前进了的位置,利用限制部104限制线调整构件103的旋钮103b的旋转动作。
夹具10的臂构件11的第一臂12和第二臂13的弹性恢复力具有使压管31向基端侧进行移动的作用。因此,如图8所示,压管31抵接于护套66的顶端。不过,由于压管31的外径形成得比护套66的内径大,因此其不会进入到护套66。
操作者向患者的体内预先插入未图示的内窥镜。然后,操作者能够从内窥镜的通道的基端部插入医疗设备1,使医疗设备1自内窥镜的通道的顶端部突出。在该过程中,通过操作者持续保持滑动件102等操作,维持臂构件11的第一臂12和第二臂13闭合的闭合形态。此时,位于臂构件11的基端侧的中间部14的一部分位于压管31的大径部31c内。
操作者在使医疗设备1贯穿内窥镜的通道将其引导至目标组织T附近时,如图8所示,能够使臂构件11从闭合形态转变为打开形态。此时,滑动件102抵接于狭缝101b的顶端面101a,处于最大程度地前进了的位置。此外,压管31的基端面抵接于护套66的顶端面。
在图8所示的状态下,操作者能够确认目标组织T的尺寸和臂构件11的张开宽度。例如在臂构件11的张开宽度(第一臂12和第二臂13之间的宽度)小于目标组织T的尺寸的情况下,操作者能够操作操作部100调整臂构件11的张开宽度。
更具体而言,在本实施方式中,通过操作者操作操作部100的滑动件102使其进退,夹具10与操作线62一起进行进退动作。即,夹具10的臂构件11的第一臂12和第二臂13通过与操作线62一起进退,能够相对于压管31进行相对移动。其结果,在臂构件11的第一臂12和第二臂13抵接于设于压管31的顶端侧的锥形面31a的同时,第一臂12和第二臂13之间的臂构件11的张开宽度扩大或者减小。如图8所示,例如在操作者向基端侧稍稍拉入滑动件102时,在臂构件11中,中间部14(比第一臂12与第二臂13交叉的部位靠基端侧的部分)进入到压管31的大径部31c内,第一臂12和第二臂13在臂构件11的径向上分开。其结果,如图9所示,操作者能够与目标组织T的尺寸相应地扩大(调整)臂构件11的张开宽度。
另外,在该过程中,由于设于臂构件11的基端侧的一对突起16、17位于压管31内的比台阶31b靠顶端侧的大径部31c内的位置,因此其不会嵌入压管31的内壁。因此,通过操作者向顶端侧推入滑动件102,也能够使臂构件11向顶端侧进行移动并且调整第一臂12与第二臂13之间的距离。
之后,操作者能够操作未图示的内窥镜调整夹具10的臂构件11的朝向和姿势,朝向目标组织T按压臂构件11。如图9所示,通过该操作,能够使目标组织T位于处于打开形态的臂构件11的第一臂12和第二臂13之间。操作者在确认目标组织T位于第一臂12和第二臂13之间时,能够操作内窥镜利用臂构件11的第一臂12和第二臂13保持目标组织T。
操作者在确认目标组织T位于第一臂12和第二臂13之间之后,把持操作部主体101并拉回滑动件102。此时,操作线62与第一臂12和第二臂13一起向基端侧进行移动。在第一臂12与第二臂13交叉的部位进入到压管31内的状态下,第一臂12和第二臂13与设于压管31的顶端侧的锥形面31a接触,第一臂12向第二臂13侧弹性变形,第二臂13向第一臂12侧弹性变形。其结果,通过第一臂12的顶端部与第二臂13的顶端部接近,臂构件11的张开宽度缩小,从而臂构件11从打开形态向闭合形态进行转变。
如图9和图10所示,在操作者向基端侧拉回滑动件102的过程中,将臂构件11的包含中间部14在内的基端部在压管31内向基端侧拉回。在本实施方式中,在设于臂构件11的基端部的一对突起16、17抵接于压管31内的台阶部31b之前,通过操作者向顶端侧推入滑动件102,能够使臂构件11向顶端侧进行移动。换言之,在臂构件11的一对突起16、17抵接于台阶部31b之前,通过操作者向顶端侧推入滑动件102,能够使臂构件11转变为打开形态。通过该操作,操作者能够使用臂构件11重新抓取目标组织T。
即,在将滑动件102拉回至上述的状态的过程中,通过操作者操作内窥镜,能够重新使夹具10与目标组织T相对。此后能够按照前述的步骤利用夹具10重新抓取目标组织T。
操作者在确认目标组织T以期望的状态保持于处于闭合形态的臂构件11时,能够向基端侧拉回滑动件102直到设于臂构件11的一对突起16、17越过压管31内的台阶部31b而位于小径部31d内为止。在该状态下,通过一对突起16、17嵌入压管31的小径部31d的内壁来限制臂构件11相对于压管31向顶端侧进行移动。换言之,在设于臂构件11的一对突起16、17位于压管31的小径部31d时,维持处于闭合形态的臂构件11保持目标组织T的状态。如图11A所示,目标组织T的根部被第一臂12和第二臂13紧缚,第一臂12与第二臂13之间的距离约为零的状态也包含在臂构件11的闭合形态中。
在该状态下,钩62a与连结构件3的卡合部在护套66内向基端侧进行移动。如图11A所示,设于臂构件11的一对突起16、17在被拉回到自压管31的基端侧的开口突出的位置时抵接于压管31的基端面并与其卡合。即,即使解除使臂构件11向压管31的基端侧进行移动的力量,也是一对突起16、17向顶端侧卡定于压管31的基端面的卡定状态。臂构件11被限制了相对于压管31向顶端侧进行移动,以闭合形态保持目标组织T的状态被锁定。在该状态下,勾在臂构件11的中间部14的钩部3c位于比压管31的基端侧的开口靠基端侧的位置,而且位于护套66内。
之后,操作者使对目标组织T进行结扎的夹具10自处置器具主体30分离。具体而言,操作者在一对突起16、17向顶端侧卡定于压管31的基端面的卡定状态下进一步向基端侧拉回滑动件102,从而在滑动件102的操作力量达到预定以上的值时,对连结构件3的细径部3b作用的拉伸力量超过使细径部3b断裂的拉伸强度。此时,细径部3b断裂,如图11B所示,连结构件3以顶端部3a、钩部3c及细径部3b的一部分连结于臂构件11的状态留置于体内。另一方面,细径部3b的一部分、中径部3d、大径部3e、缺口部3g、基端部3f及突起部3h以卡合于钩62a的状态位于护套66内。此外,夹具10的臂构件11以第一臂12和第二臂13的张开宽度约为零的闭合状态紧缚目标组织T。通过细径部3b断裂,将对目标组织T进行了结扎的夹具10留置于体内。
在对目标组织T进行了结扎的夹具10留置于体内之后,操作者能够操作内窥镜从内窥镜的通道取出医疗设备1。之后,操作者进行需要的处置,完成一连串的手术。
(夹具10的重新安装)
在本实施方式中,操作者通过将新的夹具10安装于处置器具主体30,能够使用医疗设备1对其他的目标组织T进行处置。
具体而言,操作者向顶端侧推入滑动件102直到滑动件102抵接于狭缝101b的顶端面101a为止。之后,通过推入设于滑动件102的限制部104并且使线调整构件103的旋钮103b逆时针地进行旋转,将卷绕于线调整构件103的轴部103a的操作线62放出。
通过该操作,操作线62的从线调整构件103的轴部103a到连结于钩62a的固定部62b的长度从第2长度向第1长度进行变更。其结果,从滑动件102的顶端面到钩62a的顶端的距离从第2距离向第1距离进行变更。在该状态下,操作者使连结构件3的卡合于钩62a的一部分构件自护套66的顶端侧的开口突出。
之后,通过上述的图7A和图7B所示的操作,操作者在自钩62a拆卸了连结构件3的一部分构件之后根据需要对处置器具主体30进行灭菌处理,能够利用本实施方式所示的手术将新的夹具10安装于处置器具主体30。
(医疗设备1的作用)
采用本实施方式的医疗设备1,在基端侧的操作部100的滑动件102中配置有线调整构件103。操作者通过推入滑动件102,在滑动件102抵接于狭缝101b的顶端面101a的状态下操作线调整构件103时,能够变更从滑动件102到钩62a的距离。
更具体而言,在滑动件102抵接于狭缝101b的顶端面101a、处于最大程度地前进了的位置时,若操作者推入限制部104并且使线调整构件103的旋钮103b逆时针地进行旋转,则从滑动件102到钩62a的距离从第2距离变更为第1距离。其结果,操作者不操作滑动件102使其进退,就能够使钩62a自护套66的顶端侧的开口突出。在该状态下,能够在处置器具主体30上拆卸使用完毕的夹具10和安装新的夹具10。因此,采用本实施方式的医疗设备1,能够进行夹具10的重新安装化。
此外,在滑动件102抵接于狭缝101b的顶端面101a、处于最大程度地前进了的位置时,若操作者推入限制部104,则线调整构件103的旋钮103b顺时针地进行旋转,恢复为初始状态。通过该操作,从滑动件102到钩62a的距离从上述的第1距离变更为比第1距离小的第2距离。其结果,即使操作者操作滑动件102使其进退,钩62a也不自护套66的顶端侧的开口突出。在该状态下,即使操作者使滑动件102移动到最大程度地前进了的位置,钩62a与连结构件3的缺口部3g的卡合部也不自护套66的顶端侧的开口突出。因此,在操作者使用本实施方式的医疗设备1对目标组织T进行处置时,即使在由于误操作而使滑动件102移动到最大程度地前进了的位置的状态下,也不会意料之外地解除钩62a与连结构件3的缺口部3g的卡合。
并且,采用本实施方式的医疗设备1,通过操作者操作滑动件102使其进退,能够将臂构件11与操作线62一起进行操作使它们相对于压管31进退。在本实施方式中,在形成于臂构件11的基端侧的一对突起16、17抵接于压管31的台阶部31b之前,通过操作者操作滑动件102使其进退,能够重新调整第一臂12和第二臂13之间的张开宽度。换言之,采用本实施方式的医疗设备1,在使用臂构件11重新抓取目标组织T的操作中不会意料之外地解除钩62a与连结构件3的缺口部3g的卡合。
根据以上的说明,采用本实施方式的医疗设备1,处置器具主体30能够兼顾夹具10的重新安装化和目标组织T的重新抓取操作这两者。
采用本实施方式的医疗设备1,由于线调整构件103由包括轴部103a和旋钮103b的简单的结构构成,制造也变容易,因此能够以低成本构成医疗设备1。
(第2实施方式)
以下,参照图12A~图15C说明本发明的第2实施方式的医疗设备2。以下,省略与上述的实施方式的内窥镜夹具1相同的结构的说明,以与上述的实施方式不同的点为中心进行说明。
图12A是示意地表示本发明的第2实施方式的医疗设备2的结构的局部剖视图。图12B是示意地表示本实施方式的医疗设备2的局部的结构的放大剖视图。图12C是沿着图12B中的XIIC-XIIC从医疗设备2的基端侧观察到的径向剖视图。图12D是表示本实施方式的医疗设备2的线调整构件203的结构的立体图。图13A~图15C是表示使用本实施方式的医疗设备2对目标组织T进行处置的操作的图。
如图12A所示,与上述的第1实施方式的医疗设备1相比较,本实施方式的医疗设备2构成为具有操作部200而替代操作部100。更具体而言,医疗设备2具有与上述的第1实施方式的线调整构件103不同的结构的线调整构件203。
由于本实施方式的医疗设备2的其他的结构与上述的第1实施方式的医疗设备1相同,因此标注图中的相同的附图标记,省略其说明。
如图12A和图12B所示,在医疗设备2的操作部200的滑动件(第1操作部)202中沿着轴线C1的方向形成有内腔205。医疗设备2具有线调整构件(第2操作部)203,该线调整构件(第2操作部)203由主体207、旋钮206以及两个突起204构成。如图12B所示,通过沿着轴线C1的方向在滑动件202的形成有内腔205的范围内去除滑动件202的内壁的一部分而形成一对顶端凹部208A和一对基端凹部208B。一对顶端凹部208A在轴线C1的方向上位于比一对基端凹部208B靠顶端侧的位置。
线调整构件203的主体207是外径形成得比内腔205的内径小的中空的管状的构件。即,主体207能够插入到形成于滑动件202的内腔205内。主体207例如能够使用具有一定的刚度的树脂材料而构成。通过去除主体207的基端侧的一部分而形成一对尾部207A、207B。此外,像后述那样,为了将操作线62连结于线调整构件203,在主体207的顶端侧形成有能够供操作线62插入的孔(未图示)。
在主体207的一对尾部207A、207B中形成有自外周面向径向外侧突出的一对突起204。一对突起204能够进入到顶端凹部208A和基端凹部208B并与它们卡合。在本实施方式中,一对突起204形成于主体207的方法没有特别的限定。例如,一对突起204既可以形成为粘接于主体207的一对尾部207A、207B,也可以形成为与主体207一体化。
在本实施方式中,说明如图12D所示一对突起204形成为圆锥形状的例子,但并不限定于此。一对突起204只要卡合于在滑动件202的内腔205形成的基端凹部208B或顶端凹部208A即可,其具体的形状没有特别的限定。此外,在本实施方式中,说明形成于内腔205的一对顶端凹部208A和一对基端凹部208B与一对突起204的形状相匹配地分别形成于滑动件202的内腔205的内壁上的两处的例子,但并不限定于此。例如也可以是,在滑动件202的内腔205内,顶端凹部208A和基端凹部208B形成于滑动件202的内壁的周向整周的范围内。
线调整构件203在主体207的顶端侧的外周面形成有旋钮206。旋钮206通过由操作者以把持的状态进行进退操作能够相对于滑动件202进行进退移动。旋钮206既可以形成为由与主体207相同的材料一体化,也可以在和主体207分别形成之后利用轴部206a进行连结。如图12C所示,为了防滑,也可以在旋钮206的顶端面和基端面形成有例如凹凸图案。
如图12B和图12C所示,操作线62的基端插入到形成于主体207的顶端侧的孔(未图示)而被固定。在本实施方式中,只要操作线62的基端固定于主体207即可,形成于主体207的顶端侧的孔的形状没有特别的限定。例如既可以是沿轴线C1的方向贯通主体207的孔,也可以不贯通主体207。并且,也可以将操作线62的基端固定于主体207的顶端面207C。将操作线62固定于主体207的方法没有特别的限定。能够通过各种公知的方法、例如硬钎焊、利用粘接剂进行的粘接等将操作线62的基端固定于主体207。因此,在操作者使主体207相对于滑动件202进行进退动作时,操作线62能够与主体207一起相对于滑动件202进行进退动作。
采用本实施方式的线调整构件203,通过操作者把持旋钮206而操作主体207使其沿着轴线C1的方向进退(滑动),能够将线调整构件203插入到内腔205或者从内腔205拉出。换言之,通过不操作滑动件202而仅操作线调整构件203,能够调整从滑动件202的顶端到钩62a的顶端的距离。
更具体而言,在本实施方式中,如图12A所示,在滑动件202在操作部主体201的狭缝201b内处于最大程度地前进了的位置、即抵接于狭缝201b的顶端面201a的状态下主体207的一对突起204卡合于滑动件202的内腔205的基端凹部208B内时,从滑动件202的顶端面到钩62a的顶端的距离是滑动件202与钩62a之间的第2距离。而且,在滑动件202在狭缝201b内抵接于顶端面201a的状态下主体207的一对突起204卡合于滑动件202的内腔205的顶端凹部208A内时,从滑动件202的顶端面到钩62a的顶端的距离是滑动件202与钩62a之间的第1距离(参照图13A)。换言之,在本实施方式中,操作者不操作滑动件202而仅操作线调整构件203就能够将滑动件202与钩62a之间的距离调整为第1距离和第2距离。
在本实施方式中,滑动件202与钩62a之间的第1距离大于第2距离。此外,与上述的第1实施方式同样,在滑动件202与钩62a之间的距离是第1距离时,钩62a自护套66的顶端侧的开口突出,在滑动件202与钩62a之间的距离是第2距离时,钩62a位于比护套66的顶端侧的开口靠基端侧的位置,即处于收纳于护套66内的位置。因此,在本实施方式中,在滑动件202在操作部主体201的狭缝201b内处于最大程度地前进了的位置、即抵接于狭缝201b的顶端面201a的状态下,操作者不操作滑动件202而仅操作线调整构件203就能够进行使钩62a自护套66的顶端侧的开口突出的操作和将钩62a收纳于护套66内的操作。
由于通过操作者操作线调整构件203而使操作线62和线调整构件203一起进行进退移动,因此操作线62相对于滑动件202相对地进行进退移动。不过,由于操作线62的基端固定于线调整构件203,因此操作线的从操作线62固定于线调整构件203的主体207的位置到连结于钩62a的固定部62b的长度在轴线C1的方向上恒定。
在操作者不操作线调整构件203时,一对突起204卡合于形成于滑动件202的内腔205,因此能够维持线调整构件203和滑动件202不相对地进行移动的状态。在该状态下操作者操作滑动件202使其进退时,线调整构件203与滑动件202一起进行进退移动。
(医疗设备2的动作)
以下,参照图12A~图15C说明本实施方式的医疗设备2的动作。具体而言,参照图12A~图13C说明将医疗设备2的夹具10安装于处置器具主体30A的操作。参照图14~图15C说明使用医疗设备2对目标组织T进行结扎的手术。
如图12A和图12B所示,在将医疗设备2的夹具10安装于处置器具主体30A时,首先,操作者把持操作部200向夹具壳40插入处置器具主体30A直到护套66抵接于夹具壳40的台阶部48为止。此时,钩62a收纳于护套66的内部。另一方面,在操作部200中,线调整构件203的主体207的一对突起204在滑动件202的内腔205内卡合于基端凹部208B。此外,滑动件202在狭缝201b内处于抵接于顶端面201a的最大程度地前进了的位置。在该状态下,操作部200的滑动件202与钩62a之间的距离是第2距离。
接着,如图13A所示,操作者通过把持夹具壳40的压缩部34的一对腿34A、34B将其压缩,将护套66以相对于夹具壳40的位置固定的状态进行把持。在该状态下,操作者把持线调整构件203的旋钮206,使主体207沿着轴线C1方向向顶端侧进行移动(滑动)。通过操作者的该操作,卡合于滑动件202的内腔205的基端凹部208B的一对突起204在抵接并按压于基端凹部208B的内壁的状态下欲向顶端侧进行移动。而且,通过来自基端凹部208B的内壁的回弹力作用于线调整构件203的一对突起204和一对尾部207A、207B,将一对尾部207A、207B向操作部200的径向内侧按压。其结果,一对尾部207A、207B之间的距离减小而相互接近。换言之,形成于线调整构件203的主体207的一对尾部207A、207B成为挠曲的状态,主体207的基端侧的径向上的宽度减小。
其结果,线调整构件203通过主体207的一对突起204越过基端凹部208B而能够在内腔205内相对于滑动件202向顶端侧进行移动。在操作者把持着线调整构件203的旋钮206的状态下使该线调整构件203向顶端侧进行移动时,线调整构件203以一对尾部207A、207B挠曲的状态相对于滑动件202向顶端侧进行移动直到一对突起204进入到形成于内腔205内的顶端凹部207A并与其卡合为止。此时,一对尾部207A、207B在弹性恢复力的作用下恢复为相互分开的状态。
在该过程中,固定于线调整构件203的主体207的操作线62和连结于操作线62的顶端侧的钩62a一起相对于滑动件202向顶端侧进行移动。其结果,如图13A所示,通过钩62a自护套66的顶端侧开口突出并进入到连结构件3的缺口部3g,钩62a与连结构件3相互卡合。此时,操作部200的滑动件202与钩62a之间的距离从第2距离变为比第2距离大的第1距离。另一方面,由于操作者未操作滑动件202,因此维持滑动件202抵接于狭缝201b内的顶端面201a的状态。
接着,操作者不操作滑动件202而把持线调整构件203的旋钮206使主体207沿着轴线C1方向向基端侧进行滑动。通过该操作,在维持滑动件202抵接于狭缝201b的顶端面201a的状态的同时主体207的一对突起204越过内腔205内的顶端凹部208A向基端侧进行移动。其结果,如图13B所示,线调整构件203向基端侧进行移动直到一对突起204进入到基端凹部208B并与其卡合为止。在本实施方式中,主体207向顶端侧或基端侧进行滑动的动作量没有特别的限制,但例如也可以是几毫米左右。在该过程中,在钩62a与连结构件3卡合的状态下,通过线调整构件203的主体207向基端侧进行的移动而将操作线62一起向基端侧拉回。其结果,如图13B所示,钩62a与连结构件3的卡合部被拉入到护套66的内部而收纳在其中。操作部200的滑动件202与钩62a之间的距离从第1距离变为第2距离。另一方面,由于操作者未操作滑动件202,因此维持滑动件202抵接于狭缝201b内的顶端面201a的状态。
在本实施方式中,由于操作线62固定于线调整构件203的主体207,因此即使主体207沿着轴线C1方向进行移动,操作线62在主体207与连结于钩62a的固定部62b之间的长度也恒定。不过,由于主体207相对于操作部200的滑动件202进行进退移动,因此操作线62也相对于滑动件202进行进退移动。因此,采用本实施方式的线调整构件203,能够调整操作线62的处于滑动件202的顶端面与固定部62b之间的部分的长度。
接着,操作者解除夹具壳40对压缩部34进行的压缩,把持操作部100从夹具壳40拔出插入部60。在该过程中,操作者无需向基端侧拉回滑动件202。通过该操作,能够如图13C所示将本实施方式的夹具10安装于处置器具主体30A。
此时,如图13C所示,在操作部200中,线调整构件203的一对突起204卡合于基端凹部208B内,滑动件202抵接于狭缝201b的顶端面201a。此外,在从夹具壳40拔出来的医疗设备2的顶端侧,压管31的基端面与护套66的顶端面接触。
在本实施方式中,说明了形成于线调整构件203的主体207的一对尾部207A、207B挠曲的例子,但本发明并不限定于此。例如也可以是,形成于线调整构件203的主体207的一对突起204由能够弹性变形的材质形成。更具体而言,也可以是,在操作者把持线调整构件203的旋钮206、使主体207沿着轴线C1的方向向顶端侧进行移动时,主体207的一对尾部207A、207B不变形,一对突起204被滑动件202的内腔205的内壁按压而弹性变形,成为压扁的状态。而且,也可以是,若通过操作者的操作而使线调整构件203沿着轴线C1的方向向顶端侧进行移动,则一对突起204在进入到顶端凹部208A时在弹性恢复力的作用下恢复为圆锥形状,卡合于顶端凹部208A。
(利用医疗设备2进行的手术)
以下,参照图14~图15C说明使用具有以上的结构的本实施方式的医疗设备2对目标组织T进行结扎的手术。
在将夹具10以安装于处置器具主体30A的状态从夹具壳40取出时,夹具10的臂构件11的第一臂12和第二臂13成为相互分开的打开形态。在该状态下,操作者通过与上述的第1实施方式相同的操作能够如图14所示将医疗设备2引导到体内的目标组织T附近。
如图14所示,操作者能够操作内窥镜调整夹具10的臂构件11的朝向和姿势,朝向目标组织T按压臂构件11。此时,在操作部200中,维持线调整构件203的主体207的一对突起204卡合于滑动件202的内腔205内的基端凹部208B且滑动件202抵接于狭缝201b的顶端面201a的状态。
在本实施方式中,说明了相对于目标组织T的尺寸而言夹具10的臂构件11的宽度较为恰当的例子,但并不限定于此。在相对于目标组织T的尺寸而言夹具10的臂构件11的宽度并不恰当的情况下,与上述的第1实施方式同样,操作者能够通过操作滑动件202来适当地调整臂构件11的宽度。
操作者在确认了目标组织T位于第一臂12和第二臂13之间之后,如图15A所示把持操作部主体201向基端侧拉回滑动件202。因此,第一臂12的顶端部与第二臂13的顶端部接近,臂构件11的张开宽度缩小。也就是说,在目标组织T位于第一臂12和第二臂13之间的状态下,臂构件11从打开形态向闭合形态进行转变。在该过程中,由于操作者不操作线调整构件203,因此维持一对突起204卡合于滑动件202的内腔205的基端凹部208B的状态。
在本实施方式中,与上述的第1实施方式同样,在设于臂构件11的基端侧的一对突起16、17抵接于压管31内的台阶部31b之前,通过操作者向顶端侧推入滑动件202,能够使臂构件11向顶端侧进行移动。换言之,在臂构件11的一对突起16、17抵接于台阶部31b之前,通过操作者向顶端侧推入滑动件202,能够使臂构件11转变为打开形态。通过该操作,操作者能够使用臂构件11重新抓取目标组织T。因此,在本实施方式中,操作者能够反复重新抓取目标组织T直到确认利用臂构件11以期望的状态把持目标组织T为止。
操作者在能够确认利用臂构件11以期望的状态把持目标组织T之后,向基端侧拉回操作部200的滑动件202直到设于臂构件11的基端侧的一对突起16、17位于比压管31的基端侧的开口靠基端侧的位置为止。通过该操作,如图15B所示,利用转变为闭合形态的臂构件11的第一臂12和第二臂13保持目标组织T。在该状态下,维持一对突起204卡合于滑动件202的内腔205的基端凹部208B的状态。
此时,如图15B所示,一对突起16、17通过被拉回到自压管31的基端侧的开口突出的位置而抵接于压管31的基端面并与其卡合。即,即使由操作者解除使臂构件11向压管31的基端侧移动的力量,也能维持一对突起16、17向顶端侧卡定于压管31的基端面的卡定状态。臂构件11被限制了相对于压管31向顶端侧进行移动,以闭合形态保持目标组织T的状态被锁定。在该状态下,勾在臂构件11的中间部14的钩部3c位于比压管31的基端侧的开口靠基端侧的位置,收纳于护套66内。此外,在该状态下,由于臂构件11的一对突起16、17向顶端侧卡定于压管31的基端面,因此压管31与护套66接触,但成为不相互按压的状态。操作者能够通过操作滑动件202而使一体化的臂构件11和压管31与操作线62一起进行移动。
在目标组织T被处于闭合形态的臂构件11的第一臂12和第二臂13紧缚的状态下,操作者进一步向基端侧拉回滑动件202。通过该操作,如图15C所示,在设于连结构件3的细径部3b的拉伸力量达到细径部3b的预定的拉伸强度以上时,连结构件3的细径部3b断裂。这样,维持由臂构件11把持目标组织T的状态,臂构件11、压管31及连结构件3的一部分成为一体并留置于体内。这样,对目标组织T进行了结扎的夹具10留置于体内。
之后,操作者操作内窥镜,从内窥镜的通道取出医疗设备2之后进行需要的处置,完成一连串的手术。
在本实施方式中,在医疗设备2中的处置器具主体30A重新安装其他的夹具10的情况下,考虑与上述的第1实施方式相同的操作。具体而言,操作者首先将滑动件202在狭缝201b内推入至最大程度地前进了的位置、即抵接于狭缝201b的顶端面201a的位置。然后,操作者不操作滑动件202而把持线调整构件203的旋钮206使主体207沿着轴线C1方向向顶端侧进行滑动。其结果,操作者通过不操作滑动件202而仅操作线调整构件203,使连结操作线62与钩62a的连结部移动到自护套66的顶端侧的开口突出的位置。
之后,与上述的第1实施方式同样,通过图7A和图7B所示的操作,能够自钩62a除去断裂的连结构件3的一部分。操作者根据需要对处置器具主体30A进行灭菌处理,能够与上述的操作同样地将其他的夹具10安装于处置器具主体30A。
(医疗设备2的作用)
采用本实施方式的医疗设备2,通过与上述的第1实施方式的医疗设备1同样操作者不操作滑动件202而操作线调整构件203的主体207使其相对于滑动件202进退,能够将滑动件202与钩62a之间的距离调整为第1距离和第2距离。不过,采用本实施方式的医疗设备2,即使操作者操作线调整构件203,操作线的从操作线62固定于线调整构件203的主体207的位置到连结于钩62a的固定部62b的长度也恒定。
采用本实施方式的医疗设备2,处置器具主体30A能够与上述的第1实施方式同样地兼顾夹具10的重新安装化和使用夹具10重新抓取目标组织T的操作这两者。
以上,说明了本发明的各实施方式及变形例,但本发明的保护范围并不限定于上述实施方式,能够在不脱离本发明的主旨的范围内改变各实施方式及变形例的构成要素的组合、或者对各构成要素施加或删除各种变更。本发明并不被前述的说明所限定,仅被权利要求书所限定。
根据本发明的上述各实施方式,能够提供能够实现兼顾处置器具的重新安装化和利用处置器具重新抓取目标组织的医疗设备及供给器。此外,对于该医疗设备还能够提供一种通过使处置器具卡合于供给器而将处置器具恰当地安装于医疗设备的方法。
1、2、医疗设备;3、连结构件(第1连接件);10、夹具单元(夹具);11、臂构件;12、第一臂;13、第二臂;14、中间部;16、17、突起;30、30A、处置器具主体(供给器);31、压管;40、夹具壳;60、插入部;62、操作线;62a、钩(第2连接件);66、护套;100、200、操作部;101、201、操作部主体(手柄);102、202、滑动件(第1操作部);103、203、线调整构件(第2操作部);104、限制部;204、突起;205、内腔;C1、轴线;T、目标组织。
- 供给器、医疗设备以及医疗设备的安装方法
- 医疗设备、供给器和夹具单元