一种基于激光雷达栅格地图耦合的视觉靶点布置方法
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及一种航空制造技术,尤其是一种应用于航空制造领域中的激光雷达栅格 地图耦合与视觉靶点布置方法,具体地说是一种基于激光雷达栅格地图耦合的视觉靶点 布置方法。
背景技术
目前航空制造领域中AGV使用的栅格地图借助激光雷达SLAM技术构建,因传感器与 算法限制,栅格地图精度较低。此外,缺少将栅格概率地图与实际场景精确耦合的方法,现有单纯利用AMCL概率方法耦合地图的耦合精度低,无法满足高精度导航定位的需要。
在工业4.0背景下,航空制造领域迎来了飞速的发展。随着原位制造技术的进步,装 配制造现场对原位制造技术转站载体的精度要求越来越高。AGV是转站运动的载体,其转站定位精度依托于环境地图的精确构建。激光雷达构建地图计算量小且地图构建速度快,在工业现场广泛应用,而现有的激光雷达构建地图方法,栅格地图构建精度低且缺 少栅格地图与实际场景耦合的方法,无法实现AGV高精度的自定位。而现有视觉靶点作 为一种固定标志物,使得AGV能实现高精度自定位功能。现有的视觉靶点拘囿于二维 码,且缺乏对视觉靶点的系统利用,使得AGV无法在栅格地图中达到高精度自定位效 果。
为此,引入激光跟踪仪等高精度测量设备,设计一种融合视觉靶点的激光雷达栅格 地图构建方法,能有效提高导航定位的精度。
发明内容
本发明针对激光雷达构建的栅格地图与实际场景中缺少高精度耦合方法的痛点,发 明一种基于激光雷达栅格地图耦合的视觉靶点布置方法,它引入工业测量设备激光跟踪 仪与T-Probe,通过已知匹配点云序列的ICP方法,耦合激光跟踪仪坐标系与栅格地图坐标系,能有效提高导航定位的精度。
本发明的技术方案是:
一种基于激光雷达栅格地图耦合的视觉靶点布置方法,其特征在于,首先,引入激光跟踪仪测量设备,实现激光雷达构建的栅格地图坐标系与激光跟踪仪坐标系耦合;其次,基于坐标耦合不确定度、测量不确定度与运动不确定度,确定视觉靶点的布置。
AGV领域中栅格地图坐标系与激光跟踪仪坐标系的耦合方法是:在运行场景中,激光跟踪仪布设在场景中靠近中心且遮挡较少的区域;以激光跟踪仪为原点,建立右手笛 卡尔坐标系,称之为激光跟踪仪坐标系,亦为实际场景坐标系;在AGV上放置数个激光 跟踪仪的靶球座,用以放置靶球;激光跟踪仪不断测量靶球座上所载靶球,需保证靶球 座几何中心与AGV运动中心重合;激光跟踪仪测量AGV在各个站位上的若干个靶球, 得到靶球在激光跟踪仪下坐标;在场景中,布置若干分散站位,记测量站位i处AGV位 姿p
式中,
全部测量完成后,得到激光跟踪仪测量的AGV的位姿为
经AMCL概率方法,获得AGV在栅格地图坐标系下的位姿
两坐标系耦合,即求解旋转矩阵为R、平移向量为t,使得两坐标系耦合误差函数 E(R,t)最小:
求解得到旋转矩阵为R、平移向量为t。
式中U、V由求解过程中产生的正定矩阵H经SVD分解得到的验证旋转矩阵 |R|=1;当|R|=-1或所测两坐标系点云存镜像关系,则:
耦合误差记为σ
视觉靶点布置包括如下内容:
视觉靶点粘贴在地面或天花板处,视觉靶点位姿由激光跟踪仪与T-Probe结合测量得 到,若AGV欲识别视觉靶点达到定位精度σ,则:
记X方向运动不确定度为
视觉靶点的边长为d
设定精度保障裕度系数C,则确定视觉靶点的最大布置间隔为d求解得:
视觉靶点在激光跟踪仪与视觉靶点测量下,得到的位姿为
式中,
将视觉靶点耦合到栅格地图坐标系,得到视觉靶点在栅格地图中的位姿,记为
M'=R·M+t (10)
本发明的有益效果是:
1)引入激光跟踪仪等高精度测量设备,利用高精度测量基准以提高坐标系耦合与靶 点布置的精度。
2)坐标系耦合测量次数少,耦合解算精度高。
3)视觉靶点结合实际航空制造场景灵活铺设,发明灵活鲁棒。
本发明可广泛应用于航空制造领域,视觉靶点融于栅格地图后,可有效提高AGV导航定位精度。
附图说明
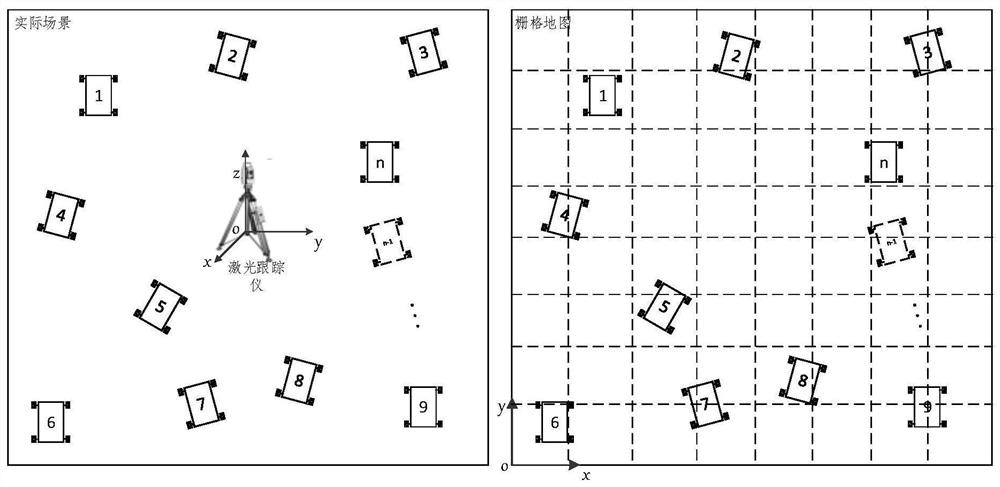
图1是本发明的两坐标系耦合示意图。
图2是本发明的AGV靶球座布置图。
图3是本发明以April Tag为例的视觉靶点布置原理图。
具体实施方式
下面结合附图和实施例对本发明作进一步的说明,应当理解,此处所描述的具体实 施例仅用以解释本发明,并不用于限定本发明。
如图1-3所示。
一种基于激光雷达栅格地图耦合的视觉靶点布置方法,包括以下两方面:
1.1设计一种引入激光跟踪仪测量设备,实现激光雷达构建的栅格地图坐标系与激光跟踪 仪坐标系(亦即实际场景坐标系)耦合的方法;
1.2研究一种基于坐标耦合不确定度、测量不确定度与运动不确定度分析的视觉靶点布置 方法。
所述的AGV领域中栅格地图坐标系与激光跟踪仪坐标系(亦即实际场景坐标系)耦合方式,耦合方法包括如下内容:
如图1左图所示意,本耦合方法中,在运行场景中,激光跟踪仪布设在场景中靠近中 心且遮挡较少的区域。以激光跟踪仪为原点,建立右手笛卡尔坐标系,称之为激光跟踪仪坐标系,亦为实际场景坐标系。
在AGV上放置数个激光跟踪仪的靶球座,用以放置靶球。激光跟踪仪不断测量靶球座上所载靶球,需尽量保证靶球座几何中心与AGV运动中心重合,图2中示意为4个靶 球座,围绕运动中心放置更多靶球座,可提高测量精度。
激光跟踪仪测量AGV在各个站位上的若干个靶球,得到靶球在激光跟踪仪下坐标。在场景中,布置若干分散站位,记测量站位i处AGV位姿p
式中,
全部测量完成后,得到激光跟踪仪测量的AGV的位姿为
经AMCL概率方法,获得AGV在栅格地图坐标系下的位姿
两坐标系耦合,即求解旋转矩阵为R、平移向量为t,使得两坐标系耦合误差函数 E(R,t)最小:
求解得到旋转矩阵为R、平移向量为t。
式中U、V由求解过程中产生的正定矩阵H经SVD分解得到的验证旋转矩阵 |R|=1。当|R|=-1或所测两坐标系点云存镜像关系,则:
耦合误差记为σ
所述视觉靶点布置方法包括如下内容:
视觉靶点粘贴在地面或天花板处,视觉靶点位姿由激光跟踪仪与T-Probe结合测量得 到,若AGV欲识别视觉靶点达到定位精度σ,则:
记X方向运动不确定度为
视觉靶点的边长为d
设定精度保障裕度系数C,则确定视觉靶点的最大布置间隔为d求解得:
视觉靶点在激光跟踪仪与视觉靶点测量下,得到的位姿为
式中,
将视觉靶点耦合到栅格地图坐标系,得到视觉靶点在栅格地图中的位姿,记为
M'=R·M+t (10)
详述如下:
1.如图1、图2所示,为实现激光跟踪仪坐标系与栅格地图坐标系的精确耦合关系,设计了如下的坐标系耦合方法。
a)如图2所示,在AGV上布置靶球座。激光跟踪仪是工业测量领域中的一种高精度的光学测量设备,可以结合反射靶球快速完成高精度测量工作。利用激光跟踪仪测量AGV若干靶球座,获得AGV在激光跟踪仪下的位姿。
激光跟踪仪测量AGV在各个站位上的若干个靶球,得到靶球在激光跟踪仪下坐标。记第i次测量AGV位姿p
b)如图1左所示,AGV驶向多个目标站位,用激光跟踪仪测量AGV在各战位的位 姿,得到AGV在激光跟踪仪坐标系下的位姿。
其中,p
c)在激光跟踪仪测量的同时,栅格地图中,利用如AMCL蒙特卡洛自定位算法等自定位方式,获得AGV在栅格地图中的位姿:
其中,x
d)借助AGV在两坐标系下的不同位姿,耦合两坐标系。
两坐标系耦合,即求解旋转矩阵为R、平移向量为t,使得两坐标系耦合误差函数 E(R,t)最小:
求解得到旋转矩阵为R、平移向量为t。
式中U、V由求解过程中产生的正定矩阵H经SVD分解得到的验证旋转矩阵 |R|=1。当|R|=-1或所测两坐标系点云存镜像关系,则:
e)坐标系耦合存在不确定度,即耦合误差
耦合误差记为σ
2.如图3所示,研究AGV识别靶点并前往目标站位的不确定度,并结合不确定度及精度要求设计视觉靶点布置间隔。
a)确定AGV识别视觉靶点后的精度要求σ;
b)确定相机识别靶点不确定度σ
c)确定运动距离,计算运动不确定度
d)如图3所示,依据测量不确定度关系,得到视觉靶点布置间隔d的约束方程:
e)依据不确定度约束方程,设定精度保障裕度系数C,则确定视觉靶点的最大布置间隔为d求解得:
f)视觉靶点的布置间隔需小于等于最大布置间隔d,并用激光跟踪仪与T-Probe结合 测量得到,视觉靶点在激光跟踪下的位姿为M={m
式中,
g)则将视觉靶点耦合到栅格地图坐标系,得到视觉靶点在栅格地图中的位姿,记为 M'={m'
M'=R·M+t
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员 来说,在不脱离本发明原理的前提下还可以作出若干改进,这些改进也应视为本发明的保护范围。
本发明未涉及部分与现有技术相同或可采用现有技术加以实现。
- 一种基于激光雷达栅格地图耦合的视觉靶点布置方法
- 利用激光雷达和视觉传感器融合构建动静态栅格地图的方法