一种基于微分规程改进型PD算法的电机转速控制方法
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及电机转速控制方法技术领域,具体是指一种基于微分规程改进型PD算法的电机转速控制方法。
背景技术
近些年,随着工业技术的持续创新与社会的稳步前进,社会生产和生活对各种各样的电器设备功能及其性能要求标准越来越严格,尤其是在电机技术方面,其直接关系到能源的有效变换、利用以及能源的开发。为了满足现代工业生产高速大容量化发展的需要,电机速度的有效控制将成为一种趋势,电机转速控制的应用将会更加广泛。电机转速控制以结构简单,制造方便,造价低廉,运行稳定、效率高,节能等的优势逐渐进入人们的视线,在多个工业制造的领域中发挥着难以替代的作用。在现代工业的生产中,电机转速控制不仅在电动车辆,电梯机床纺织造纸等高性能调速技术的应用场合得以应用,还主要针对拖动风机水泵压缩机的电机上实现调速节能,其采用调速来调节流量的运行方式,达到了良好的节能效果,有力的推动电机转速控制技术的快速发展。电机调速系统控制性能的优劣直接影响系统的可靠性和控制精度,尤其是在高速高精度领域,电机的选择更是尤为重要。现今,交流电机调速系统已经取代直流电机系统。由于直流电机需要设置机械换向器和电刷,调速存在固有的结构性缺陷,影响运行的可靠性,已经远远不能适应现代工业生产向高速大容量化发展的需要。
发明内容
本发明要解决的技术问题是克服以上技术缺陷,提供一种基于微分规程改进型PD算法的电机转速控制方法,基于微分规程改进型PID控制方法,其不仅保存了传统PID控制器的简单结构,而且将系统的稳定性和快速性相结合,进行动态过程合理规划,能够实现对电机的稳定、快速控制,应用于非线性、时变等复杂系统中的控制效果较好。
为解决上述技术问题,本发明提供的技术方案为:一种基于微分规程改进型PD算法的电机转速控制方法,包括以下步骤:
步骤(1):设计非线性fn函数;
步骤(2):设计微分规程改进型PD控制器,输入电机转速的误差信号e(t),输出微分规程改进型PD的控制量U
步骤(3):输出的微分规程改进型PD的控制量U
优选的,所述非线性fn函数为:
其中,x
本发明与现有技术相比的优点在于:采用复合非线性的控制结构,将线性PD和非线性PD相结合,比例P采用的是线性结构,D采用的是非线性结构,并对非线性部分进行了微分规程,使系统具有足够的快速性的同时,又保证了一定的稳定性,使控制系统具有高响应、高稳定的特性。
附图说明
图1是本发明一种基于微分规程改进型PD算法的电机转速控制方法的电机转速控制结构图。
图2是本发明一种基于微分规程改进型PD算法的电机转速控制方法的非线性函数比较图。
图3是本发明一种基于微分规程改进型PD算法的电机转速控制方法的基于改进型非线性PID的偏差耦合协同控制的Simulink仿真模型图。
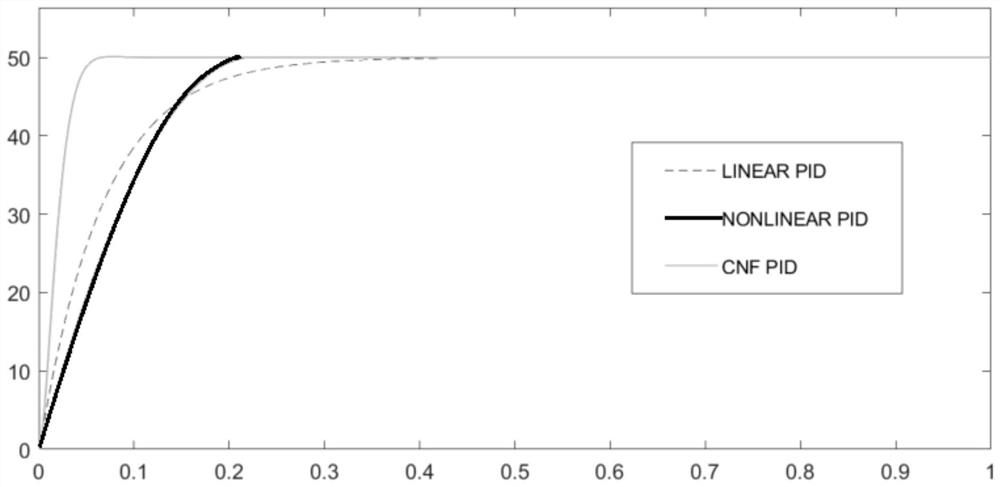
图4是本发明一种基于微分规程改进型PD算法的电机转速控制方法的在Simulink中非线性PID和改进型PID控制的单轴电机的输出对比图。
具体实施方式
下面结合附图对本发明做进一步的详细说明。
一种基于微分规程改进型PD算法的电机转速控制方法,包括以下步骤:
步骤(1):设计非线性fn函数;
步骤(2):设计微分规程改进型PD控制器,输入电机转速的误差信号e(t),输出微分规程改进型PD的控制量U
步骤(3):输出的微分规程改进型PD的控制量U
所述非线性fn函数为:
其中,x
本发明在具体实施时,设被控对象为一个二阶系统,其传递函数为:
步骤(1):设计非线性fn函数。
首先,传统的非线性PD控制中,采用的非线性函数是fal函数,其函数结构如下:
其中,a∈(0,1],δ∈(0,1]为函数参数。由于fal函数快的特性,能够改善电机控制系统中误差跟踪的动态过程,提高系统的响应速度。
但是,在电机转速误差较小时,fal函数赋予微分的值仍然较大,这样容易破坏系统的稳定性。因此,为了解决fal函数存在的问题,提高控制系统的稳定性,对fal函数进行改进,提出了fn函数。
其中,x
由说明书附图2可知,在系统的低频段中,即系统的跟踪误差较大时,fn函数提供的输出增益大于fal函数的输出增益,系统可以获得较好的动态性能以及较大范围的带宽,减小了系统的震荡程度,提高了系统的控制精度和响应速度;在系统的高频段中,即系统的跟踪误差较小时,fn函数提供的输出增益迅速下降,系统进入稳定状态,此时的微分作用非常小,降低了误差对系统稳定性的影响;当跟踪误差接近0时,系统的微分作用实现了平稳过渡,当跟踪误差为0时去除了微分作用,防止高频噪声在系统出现放大现象,以及微分作用在系统处于稳定时的突变,进而导致系统处于不稳定状态。因此,通过图2,我们可以直观地得出一个结论:相比于fal函数,fn函数更有利于控制器对被控系统的跟踪控制。
步骤(2):设计微分规程改进型PD控制器,输入电机转速的误差信号e(t),输出微分规程改进型PD的控制量U
本发明采用了非线性PID中的一种经典PD形式的非线性组合,并对其进行改进。传统非线性PID表示为
u=k1fal(e1,a1,δ)+k2fal(e2,a2,δ)
式中,0<a1<1<a2,k
由于微分项对高频噪声干扰、跟踪误差响应过于灵敏,为了降低高频干扰对系统稳定性的影响,同时保留函数在系统低频段中变化的快速性,提出了更高效的非线性fn函数,并采用非线性与线性结合的PID控制结构来代替传统PID控制。fn函数能够根据系统的跟踪输入来判断系统所处的频段,设置微分作用的阈值,从而对微分作用的行程进行合理规划,使微分项在系统上升阶段改善动态性能,减小振荡程度;在系统趋于稳定作用逐渐减弱,避免过大的微分项对高频噪声的放大,破坏系统的稳定性。
微分规程改进型PID控制器保留了经典PID控制中的微分作用的快速性,同时吸取了非线性函数收敛速度快的优点,使系统的微分作用从大增益快速降低到小增益,实现微分作用的平稳过渡。
步骤(4):输出的微分规程改进型PD的控制量U
输入电机转速为50rad/s,设被控对象的传递函数为:
根据输入信号和被控对象的传递函数,对线性、非线性PID和改进型非线性PID进行参数整定,得到其输出相应曲线,从说明书附图4中可以看出在电机参数相同的情况下,线性PID的响应速度较快,但趋于稳定的速度较慢,动态性能较差,非线性PID的动态性能好,但是响应速度较慢,而改进型PID结合两者的优点,具有更佳的快速性和稳定性,以及更好的控制性能。
以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
- 一种基于微分规程改进型PD算法的电机转速控制方法
- 一种基于粒子群算法的永磁同步电机转速控制方法