一种智能盖板的喷洗装置
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及智能马桶的技术领域,特别是一种智能盖板的喷洗装置。
背景技术
近年来,随着人们生活水平的提高,健康生活越来越受到人们的重视,新型的卫浴产品走入了平常百姓家庭,智能马桶具有便后自动冲洗的功能,不仅给人们提供了新的卫浴理念,也大大提高了人们的日常卫生。
现有智能马桶的喷洗装置的喷洗杆,往往是喷洗杆在轨道上沿固定方向伸缩运动,为满足喷洗杆喷射距离及角度要求,容易导致喷洗装置的高度、长度尺寸较大,这对智能盖板做低做小的设计需求影响甚大。
为了解决上述问题,本发明提供一种智能盖板的喷洗装置,本案就此产生。
发明内容
为实现上述目的,本发明的技术方案如下:
一种智能盖板的喷洗装置,包括:
支架,设有滑轨;
喷洗杆,滑动连接于所述滑轨,且能相对所述滑轨转动预设角度;
驱动单元,驱动所述喷洗杆沿所述滑轨做伸缩运动;
偏转单元,连接于所述喷洗杆的后端,喷洗杆在所述偏转单元的作用下相对所述支架偏转预设角度。
进一步设置为:所述偏转单元包括:
滑块,滑动连接于所述滑轨;
联动块,活动连接于所述滑块上并具有第一位置和第二位置,所述喷洗杆的后端与所述联动块活动连接配合;
所述喷洗杆伸出过程中或伸出到位时,所述联动块活动至所述第一位置,从而带动所述喷洗杆正向偏转,使得喷洗杆的前端下移,后端上移;所述喷洗杆缩回过程中或回缩到位时,所述联动块活动至所述第二位置,从而带动所述喷洗杆反向偏转,使得所述喷洗杆的前端上移,后端下移。
进一步设置为:所述联动块滑动或摆动设于所述滑块上,所述喷洗杆的后端与所述联动块枢接配合。
进一步设置为:所述滑块上设有限位部,所述联动块位于所述第一位置时,与所述限位部限位配合以阻止所述联动块与所述滑块相分离,所述支架上设有抵接部,所述联动块随所述滑块活动至与所述抵接部相配合时,所述抵接部使得所述联动块相对所述滑块活动至所述第二位置。
进一步设置为:所述联动块与所述滑块之间设有弹性件,所述弹性件对所述联动块施加往所述第一位置方向活动的弹性力,所述联动块与所述抵接部分离时,所述联动块在所述弹性力作用下活动至所述第一位置;或者,所述联动块与所述支架之间设有相互磁吸的磁吸件,所述联动块与所述抵接部相分离时,所述磁吸件相磁吸使得所述联动块活动至所述第一位置。
进一步设置为:所述支架的后部设有压筋,所述抵接部由所述压筋的底面形成,所述联动块的顶部与所述压筋的底面抵接配合,所述联动块的顶部设有第二导向斜面和/或所述压筋的底面的前端设有第一导向斜面,所述联动块在所述第二导向斜面和/或第一导向斜面的导向下与所述压筋的底面抵接配合。
进一步设置为:所述支架内设有支架限位面,所述喷洗杆偏转预设角度时,所述喷洗杆的底面与所述支架限位面配合;所述支架上设有压轮,所述压轮与所述喷洗杆的顶面滚动配合。
进一步设置为:所述喷洗杆为直杆或弧杆;所述支架限位面上设置与所述喷洗杆的底面滚动配合的滚轮;或者,所述喷洗杆为直杆,支架限位面为直面,所述滑轨为直轨道;或者,所述喷洗杆为弧杆,所述支架限位面为弧面,所述滑轨为弧轨道。
进一步设置为:联动块相对所述滑块上下活动,所述第一位置为高位,所述第二位置为低位;或者,所述第一位置为低位,所述第二位置为高位。
进一步设置为:所述驱动单元与所述喷洗杆传动连接;或者所述驱动单元与所述滑块转动连接,并通过所述滑块带动所述喷洗杆。
本发明的有益效果如下:
1、通过设置支架、喷洗杆、驱动单元、以及偏转单元,通过驱动单元带动喷洗杆沿支架的滑轨进行滑动,在滑动的过程中或滑动到位时,通过偏转单元带动喷洗杆偏转预设角度,从而能够在满足喷洗杆喷射距离及角度的要求下,有效降低整个喷洗装置的高度,满足智能盖板的低矮化设计需求,结构简单,设计构思巧妙;
2、偏转单元包括滑块和联动块,滑块在滑轨上滑动,联动块在滑块上活动,喷洗杆与联动块活动连接配合,联动块相对滑块活动时带动喷洗杆相对滑轨偏转,结构简单,功能可靠。
3、通过在滑块上设置限位部,在支架上设置抵接部,从而将联动块分别限位于第一位置和第二位置,结构简单,角度调整功能可靠。
附图说明
此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
其中:
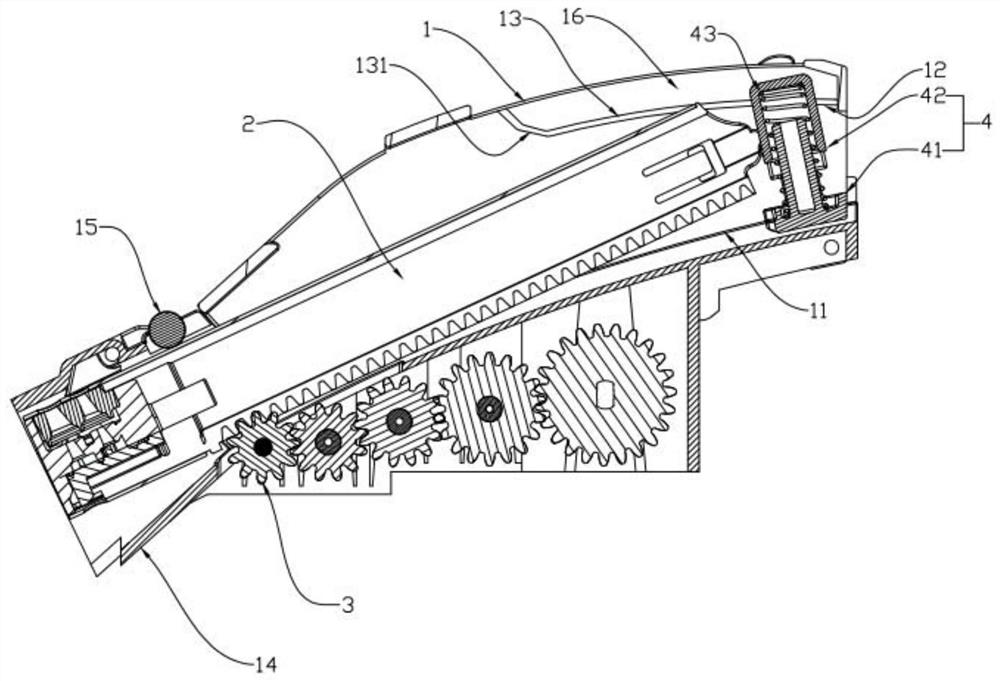
图1是本发明实施例1中的整体结构在喷洗杆处于未伸出状态时的剖视图;
图2是本发明实施例1中的整体结构在喷洗杆处于伸出状态时的剖视图;
图3是本发明实施例1中的整体结构的立体分解图;
图4是本发明实施例1中滑块和联动块之间的连接关系图;
图5是本发明实施例1中喷洗杆为直杆时的动作简图;
图6是本发明实施例1中喷洗杆为弧杆时的动作简图;
图7是本发明实施例3中喷洗杆为直杆、支架限位面为直面、以及滑轨为直轨道时的动作简图;
图8是本发明实施例3中喷洗杆为弧杆、支架限位面为弧面、以及滑轨为弧轨道时的动作简图。
标号说明:
1、支架;11、滑轨;12、抵接部;13、压筋;131、第一导向斜面;14、支架限位面;15、压轮;16、侧壁;2、喷洗杆;3、驱动单元;4、偏转单元;41、滑块;411、限位部;42、联动块;421、第二导向斜面;43、弹性件;5、滚轮。
具体实施方式
为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚、明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
实施例1如下:
参照图1至图4,一种智能盖板的喷洗装置,包括:
支架1,设有滑轨11;
喷洗杆2,滑动连接于滑轨11,且能相对滑轨11转动预设角度;
驱动单元3,驱动喷洗杆2沿滑轨11做伸缩运动;
偏转单元4,连接于喷洗杆2的后端,喷洗杆2在偏转单元4的作用下相对支架1偏转预设角度。
通过设置支架1、喷洗杆2、驱动单元3、以及偏转单元4,通过驱动单元3带动喷洗杆2沿支架1的滑轨11进行滑动,在滑动的过程中或滑动到位时,通过偏转单元4带动喷洗杆2偏转预设角度,从而能够在满足喷洗杆2喷射距离及角度的要求下,有效降低整个喷洗装置的高度,满足智能盖板的低矮化设计需求。
偏转单元4包括:
滑块41,滑动连接于滑轨11;
联动块42,活动连接于滑块41上并具有第一位置和第二位置,喷洗杆2的后端与联动块42活动连接配合;
优选的,联动块42相对滑块41上下活动,联动块42与滑块41的具体连接方式为滑动配合,喷洗杆2的后端与联动块42枢接配合。喷洗杆2伸出过程中或伸出到位时,联动块42活动至第一位置,从而带动喷洗杆2正向偏转,使得喷洗杆2的前端下移,后端上移;喷洗杆2缩回过程中或回缩到位时,联动块42活动至第二位置,从而带动喷洗杆2反向偏转,使得喷洗杆2的前端上移,后端下移。
具体的,本实施例中,第一位置为高位,第二位置为低位。在其他实施例中也可以替换为,第一位置为低位,第二位置为高位,效果是一样的。
滑块41上设有限位部411,联动块42位于第一位置时,与限位部411限位配合以阻止联动块42与所述滑块41相分离,支架1上设有抵接部12,联动块42随滑块41活动至与抵接部12相配合时,抵接部12使得联动块42相对滑块41活动至第二位置。
联动块42与滑块41之间设有弹性件43,弹性件43优选为弹簧。弹性件43对联动块42施加往第一位置方向活动的弹性力,联动块42与抵接部12分离时,联动块42在弹性力作用下活动至第一位置。
驱动单元3优选包括齿轮,且驱动齿轮转动的驱动源优选为电机,驱动单元3与喷洗杆2传动连接,或者驱动单元3与滑块41转动连接,并通过滑块41带动喷洗杆2。
支架1的后部设有压筋13,具体的,支架1上位于滑轨11的两侧分别设有一侧壁16,每个侧壁16的内表面上分别设有一沿着喷洗杆2的滑动方向延伸的压筋13。压筋13优选为直面或弧面或折线压筋13,抵接部12由压筋13的底面形成,联动块42的顶部与压筋13的底面抵接配合,联动块42的顶部设有第二导向斜面421,压筋13的底面的前端设有第一导向斜面131,联动块42在第二导向斜面421和第一导向斜面131的导向下与压筋13的底面抵接配合。在其他实施例中,也可以仅联动块42的顶部设有第二导向斜面421,或者仅压筋13的底面的前端设有第一导向斜面131等。
支架1内设有支架限位面14,喷洗杆2偏转预设角度时,喷洗杆2的底面与支架限位面14配合;支架1上设有压轮15,压轮15与喷洗杆2的顶面滚动配合,压轮15能够减小二者之间的滑动摩擦力。
参照图5和图6,其中喷洗杆2为直杆或弧杆时,支架限位面14上设置与喷洗杆2的底面滚动配合的滚轮5,滚轮5能够减小二者之间的滑动摩擦力。
实施例1的工作原理:
使用时,如图1所示,此时,喷洗装置处于未工作的初始状态,启动电机后,电机带动驱动单元3,驱动单元3进而带动喷洗杆2沿滑轨11滑动伸出,喷洗杆2带动滑块41和联动块42向前滑动,与此同时,联动块42沿着压筋13底面的抵接部12滑动,直到联动块42与抵接部12相分离后,此时如图2所示,弹性件43带动联动块42相对滑块41滑动至第一位置,联动块42带动喷洗杆2正向偏转,使得喷洗杆2的前端下移,后端上移,从而可以更好地对人体进行喷水。清洗结束后,电机带动驱动单元3反向活动,驱动单元3进而带动喷洗杆2沿滑轨11滑动缩进,喷洗杆2带动滑块41和联动块42向后滑动,当联动块42与压筋13底面的抵接部12相抵接时,抵接部12使得联动块42活动至第二位置,从而带动所述喷洗杆2反向偏转,使得喷洗杆2的前端上移,后端下移,从而完成喷洗杆2的收纳过程。
实施例2:其与实施例1的不同之处在于:
本实施例不设置弹性件43,替换为:联动块42与支架1之间设有相互磁吸的磁吸件(未图示),联动块42与抵接部12相分离时,磁吸件相磁吸使得联动块42活动至第一位置。
实施例3:驱动联动块42由第二位置活动至第一位置的方式可选用实施例1和实施例2的驱动方式,其与实施例1的不同之处在于:
参照图7,喷洗杆2为直杆,支架限位面14为直面,滑轨11为直轨道。
实施例4:驱动联动块42由第二位置活动至第一位置的方式可选用实施例1和实施例2的驱动方式,其与实施例1的不同之处在于:
参照图8,喷洗杆2为弧杆,支架限位面14为弧面,滑轨11为弧轨道。
在其他的一些实施例中,也可以选择将上述实施例的联动块42滑动装设在滑块41上替换为联动块42摆动装设在滑块41上,同样的,使联动块42相对滑块41在第一位置和第二位置之间进行摆动。
上面结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
- 一种智能盖板的喷洗装置
- 一种智能盖板及其人体喷洗装置用的换向阀结构