晶圆键合方法、晶圆及晶圆键合结构
文献发布时间:2023-06-19 12:05:39
技术领域
本发明属于集成电路制造技术领域,具体涉及一种晶圆键合方法、晶圆及晶圆键合结构。
背景技术
晶圆键合已经成为半导体制造技术集成发展和实用化的关键技术。晶圆键合是指将两片平整的晶圆面对面贴合起来,并施加以一定的压力、温度、电压等外部条件,在原有的两片晶圆间的界面产生原子或者分子间的结合力,如共价键、金属键、分子键等,使两表面间的键合能达到一定强度,而使这两片晶圆结为一体。
为了实现高精度对准键合,目前主要采用两种模式,第一种:通过两片晶圆各自的对准标记对准实现键合;第二种:通过寻找晶圆边界及缺口(notch)对准实现键合。
第一种模式的优点:精度高;缺点:成本高,需要高精度键合机、键合晶圆都需要设计键合对准标记,工艺复杂且成本高。
第二种模式的优点:成本低,键合晶圆不需要设计对准标记,节省很多工艺流程;缺点:对准精度低,导致后道光刻工艺(识别notch精度<44μm)无法接受,易导致报废,目前通过晶圆边界及notch对准实现键合工艺能力在400μm左右,主要是因为晶圆notch质量不好导致两片晶圆左右旋转方向的对准精度误差。
发明内容
本发明的目的在于提供一种晶圆键合方法、晶圆及晶圆键合结构,在键合设备精度不高的条件下,最终实现器件晶圆和承载晶圆的精确对准,满足后续光刻工艺对键合对准的精度要求。
本发明提供一种晶圆键合方法,包括:
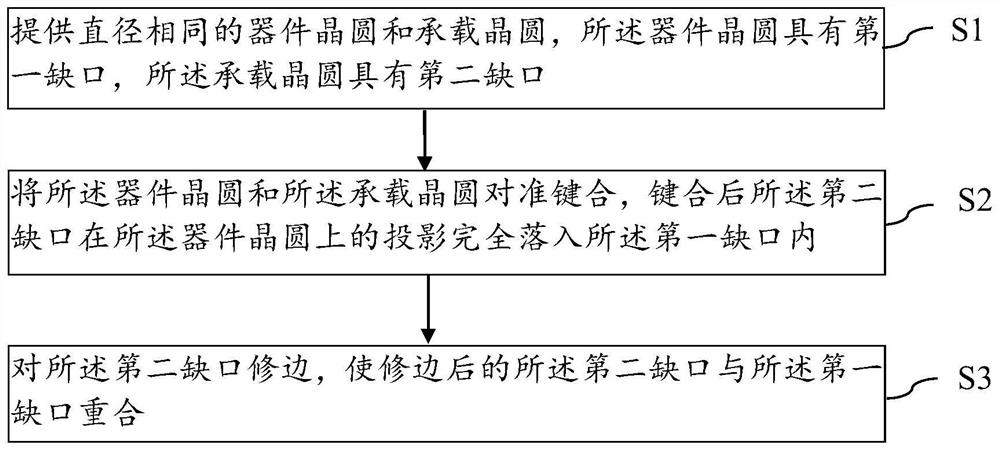
提供直径相同的器件晶圆和承载晶圆,所述器件晶圆具有第一缺口,所述承载晶圆具有第二缺口;
将所述器件晶圆和所述承载晶圆对准键合,键合后所述第二缺口在所述器件晶圆上的投影完全落入所述第一缺口内;
对所述第二缺口修边,使修边后的所述第二缺口与所述第一缺口重合。
进一步的,修边后的所述第二缺口与所述第一缺口的不重合误差小于等于3μm。
进一步的,在所述器件晶圆和所述承载晶圆的俯视方向上,所述第一缺口和所述第二缺口均呈扇形。
进一步的,所述第一缺口的对称轴和所述第二缺口的对称轴重合时,所述第一缺口对应的扇形弧长比所述第二缺口对应的扇形弧长大850μm~1030μm。
进一步的,所述第一缺口对应的扇形圆心角为89°~95°,所述第一缺口对应的扇形半径为1100μm±35μm,所述第一缺口对应的扇形弧长为1670μm~1780μm。
进一步的,所述第二缺口对应的扇形圆心角为89°~95°,所述第二缺口对应的扇形半径为500μm±20μm,所述第二缺口对应的扇形弧长为750μm~820μm。
进一步的,将所述器件晶圆和所述承载晶圆对准键合后,所述器件晶圆的中心轴与所述承载晶圆的中心轴重合。
进一步的,将所述器件晶圆和所述承载晶圆对准键合包括:
先将所述器件晶圆和所述承载晶圆粘合,再进行退火工艺实现共价键键合。
进一步的,所述承载晶圆上不设置有元件图形。
进一步的,对所述第二缺口修边采用激光切割或研磨刀研磨。
进一步的,所述第二缺口对应的扇形圆心角为89°~95°,所述第二缺口对应的扇形半径为500μm±50μm。
本发明还提供一种晶圆键合结构,包括:
直径相同的器件晶圆和承载晶圆,所述器件晶圆和所述承载晶圆键合且具有相同的缺口,所述缺口呈扇形,所述缺口对应的扇形圆心角为89°~95°,所述缺口对应的扇形半径为1100μm±35μm,所述缺口对应的扇形弧长为1670μm~1780μm。
本发明还提供一种晶圆,所述晶圆包括缺口,所述缺口对应的扇形圆心角为89°~95°,所述缺口对应的扇形半径为500μm±50μm。
进一步的,所述缺口对应的扇形半径为500μm±20μm,所述缺口对应的扇形弧长为750μm~820μm。
与现有技术相比,本发明具有如下有益效果:
本发明提供一种晶圆键合方法,本实施例通过承载晶圆上预设较小尺寸的第二缺口,在将所述器件晶圆和所述承载晶圆对准键合后,使所述第二缺口在所述器件晶圆上的投影完全落入所述第一缺口内;对所述第二缺口修边,去适配所述第一缺口,使修边后的所述第二缺口与所述第一缺口重合;即按照器件晶圆第一缺口的大小,将承载晶圆的第二缺口通过打磨、切割成器件晶圆第一缺口的大小。在键合设备对准精度不高的条件下,最终实现器件晶圆和承载晶圆的精确对准,提高晶边键合工艺精度能力,满足后续光刻工艺对键合对准的精度要求。在承载晶圆上不需要经过光刻工艺制作对准标记(mark),可以减少承载晶圆的工艺流程,节约成本。可以降低键合设备性能要求,以便于低成本制作键合设备。
本方案还提供一种新型晶圆,这种新型晶圆与常规晶圆相比具有较小的缺口(notch)设计,但如上所述,不能仅仅将这种较小缺口的设计理解为尺寸的简单变化,这种小缺口晶圆改变了晶圆缺口惯有的设计思路,即克服了传统晶圆设计的惯性思维,能够在晶圆键合对准时提高对准效率、降低成本同时能够符合精度的要求。
附图说明
图1为本发明实施例的一种晶圆键合方法流程示意图。
图2为本发明实施例的器件晶圆的示意图。
图3为本发明实施例的承载晶圆的示意图。
图4为本发明实施例的两晶圆键合后的第一种情况。
图5为本发明实施例的两晶圆键合后的第二种情况。
图6为图5中第二缺口和第一缺口处的局部放大示意图。
图7为本发明实施例的两晶圆键合后的第三种情况。
图8为本发明实施例的第二缺口修边后的示意图。
其中,附图标记如下:
10-器件晶圆;n1-第一缺口;20-承载晶圆;n2-第二缺口;W-键合晶圆。
具体实施方式
基于上述研究,本发明实施例提供了一种晶圆键合方法。以下结合附图和具体实施例对本发明进一步详细说明。根据下面说明,本发明的优点和特征将更清楚。需要说明的是,附图均采用非常简化的形式且使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
本发明实施例提供了一种晶圆键合方法,如图1所示,包括:
提供直径相同的器件晶圆和承载晶圆,所述器件晶圆具有第一缺口,所述承载晶圆具有第二缺口;
将所述器件晶圆和所述承载晶圆对准键合,键合后所述第二缺口在所述器件晶圆上的投影完全落入所述第一缺口内;
对所述第二缺口修边,使修边后的所述第二缺口与所述第一缺口重合。
下面结合图2至图8介绍本发明实施例的晶圆键合方法的各步骤。
图2为本发明实施例的器件晶圆10的示意图;图3为本发明实施例的承载晶圆20的示意图。如图2和图3所示,提供直径相同的器件晶圆10和承载晶圆20,所述器件晶圆具有第一缺口(notch)n1,所述承载晶圆20具有第二缺口(notch)n2。承载晶圆20主要用于支撑或承载器件晶圆10,器件晶圆10具有相对的两表面,将器件晶圆10的一侧表面固定在承载晶圆20上,以便于加工器件晶圆10的另一侧表面。示例性的,所述承载晶圆20上不设置有器件图形(例如为光面晶圆),亦即所述承载晶圆20与器件晶圆10不需要实现二者晶圆上图案的相互对准,需实现的是器件晶圆10的周圈边界轮廓与承载晶圆20的周圈边界轮廓在两晶圆厚度方向上的对齐(即实现两晶圆的中心轴重合),以及第一缺口(notch)n1的边界轮廓和第二缺口(notch)n2的边界轮廓在两晶圆厚度方向上的对齐,周圈边界轮廓和缺口边界轮廓不对准(不对齐)的误差均在后道光刻工艺允许的误差范围内。应当理解,因两晶圆直径相同,因此两晶圆的周圈边界轮廓是容易实现对准的,主要难点是实现两晶圆的缺口边界轮廓对准(对齐)。
如图4至图7所示,将所述器件晶圆10和所述承载晶圆20对准键合,键合后所述第二缺口n2在所述器件晶圆10上的投影完全落入所述第一缺口n1内。所述器件晶圆的周圈轮廓边缘与所述承载晶圆的周圈轮廓边缘对齐(即实现两晶圆的中心轴重合)。对准键合包括:先将所述器件晶圆和所述承载晶圆对准粘合,再进行退火工艺实现共价键键合,增加键合强度。
第一缺口n1和第二缺口n2的大小是在提供直径相同的器件晶圆10和承载晶圆20步骤时就确定的。图4示出了两晶圆键合后的第一种情况,第二缺口n2靠第一缺口n1左侧。图5示出了两晶圆键合后的第二种情况,第二缺口n2落在第一缺口n1中间,是较理想的状态。图6为图5中第二缺口n2和第一缺口n1处的局部放大示意图。图7示出了两晶圆键合后的第三种情况,第二缺口n2靠第一缺口n1右侧。
如图5和图6所示,俯视所述器件晶圆10和所述承载晶圆20,所述第一缺口n1和所述第二缺口n2均呈扇形;在其他实施例中,所述第一缺口n1和所述第二缺口n2也可以为其他形状,例如为向晶圆的圆心方向凹陷的方形豁口。示例性的,所述第一缺口n1对应的扇形圆心角∠A为89°~95°,所述第一缺口n1对应的扇形半径AB为1100μm±35μm,所述第一缺口对应的扇形弧长BC为1670μm~1780μm。所述第二缺口n2对应的扇形圆心角∠D为89°~95°,所述第二缺口对应的扇形半径DE可为500μm±50μm;进一步的,所述第二缺口n2对应的扇形半径DE还可为500μm±20μm,所述第二缺口n2对应的扇形弧长EF为750μm~820μm。较佳的,所述第一缺口n1的对称轴和所述第二缺口n2的对称轴重合时,所述第一缺口n1对应的扇形弧长BC比所述第二缺口n2对应的扇形弧长EF大850μm~1030μm,即在现有键合设备精度不高的条件下:可以左右各留出425μm~515μm(例如BE和CF)的空间,兼容晶圆键合工艺对准精度不足的缺点,能够很好地适应目前通过晶圆边界及notch对准实现键合工艺能力在400μm左右的工艺能力。
对图4、图5或图7中的所述第二缺口n2修边,如图8所示,使修边后的所述第二缺口与所述第一缺口重合(对齐后的缺口),得到由承载晶圆20与器件晶圆10构成的键合晶圆。应当理解,完全重合是理想状态,实际工艺中,要求修边后的所述第二缺口与所述第一缺口的不重合误差小于等于3μm,以满足后续光刻工艺对键合对准的精度要求。第一缺口(notch)n1的边界轮廓和第二缺口(notch)n2的边界轮廓在两晶圆厚度方向上对齐,后续光刻工序中,光学采集系统中光源发出光线照射在键合晶圆的对齐后的缺口上,采集对齐后的缺口(指定方向)的图像数据以及键合晶圆(承载晶圆20与器件晶圆10)的晶边上的至少三点的图像数据,计算出键合晶圆的圆心,还可以确定晶圆方向;即通过对齐后的缺口确定圆心和晶圆方向。
对所述第二缺口修边采用激光切割或研磨刀研磨。研磨刀配置在晶圆修边机上,采用研磨刀对晶圆进行边缘研磨。通常情况下,研磨刀的转速最大值为60000转/分钟,正常工作转速为3000转/分钟,为保障人身安全,需在转速低于10转/分钟的条件下才可进行更换研磨刀的工作。并且,研磨刀表面温度低于30摄氏度时,人体接触研磨刀作业才能保障其避免被烫伤。
本实施例还一种晶圆键合结构,包括:
直径相同的器件晶圆和承载晶圆,所述器件晶圆和所述承载晶圆键合且具有相同的缺口,所述缺口呈扇形,所述缺口对应的扇形圆心角为89°~95°,所述缺口对应的扇形半径为1100μm±35μm,所述缺口对应的扇形弧长为1670μm~1780μm。所述缺口即上述晶圆键合方法中修边后的所述第二缺口与所述第一缺口重合对齐后的缺口。
本发明还提供一种晶圆,所述晶圆包括缺口,所述缺口对应的扇形圆心角为89°~95°,所述缺口对应的扇形半径为500μm±50μm。进一步的,所述缺口对应的扇形半径为500μm±20μm,所述缺口对应的扇形弧长为750μm~820μm。本方案的晶圆与常规晶圆相比具有较小的缺口(notch)设计,但不能仅仅将这种较小缺口的设计理解为尺寸的简单变化,这种小缺口晶圆改变了晶圆缺口惯有的设计思路,即克服了传统晶圆设计的惯性思维,能够在晶圆键合对准时提高对准效率、降低成本同时能够符合精度的要求。
综上所述,本实施例通过承载晶圆20上预设较小尺寸的第二缺口(notch)n2,在将所述器件晶圆和所述承载晶圆对准键合后,使所述第二缺口n2在所述器件晶圆10上的投影完全落入所述第一缺口n1内;对所述第二缺口n2修边,去适配所述第一缺口n1,使修边后的所述第二缺口与所述第一缺口重合;即按照器件晶圆第一缺口n1的大小,将承载晶圆的第二缺口n2通过打磨、切割成器件晶圆第一缺口n1的大小。在键合设备对准精度不高的条件下,最终实现器件晶圆和承载晶圆的精确对准,满足后续光刻工艺对键合对准的精度要求。在承载晶圆上不需要设计对准标记(mark),可以减少承载晶圆的工艺流程,节约成本,可以降低键合设备性能要求。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的方法而言,由于与实施例公开的器件相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
- 晶圆键合方法、晶圆键合结构及调整晶圆变形量的方法
- 一种晶圆键合加压装置、晶圆键合的方法及晶圆键合设备