一种无人机的降落回收系统
文献发布时间:2023-06-19 12:08:44
技术领域
本发明涉及无人机技术领域,尤其涉及一种无人机的降落回收系统。
背景技术
无人驾驶飞机简称“无人机”,英文缩写为“UAV”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
前市面中所有无人机自动机场所采用的无人机回收系统多是借助于机器视觉、传感器等产品来达到促使无人机可以精确地降落至指定的无人机自动机场中的目的,就无人机的充电问题也多是采用的是机械手自动拆装电池的方式来实现,这一系列的技术导致无人机自动机场的价格居高不下,难以实现大规模应用的目的。
因此,提出一种无人机的降落回收系统。
发明内容
本发明的目的在于:为了解决上述的问题,而提出的一种无人机的降落回收系统。
为了实现上述目的,本发明采用了如下技术方案:
一种无人机的降落回收系统,包括:
机巢以及充电机插口改装暴露的无人机;
机巢包括:
渐缩型无人机停机坪,用于接收降落的无人机;
充电集成箱,用于控制输出电流,以实现对无人机的供电;
磁吸式充电接口,用于连接无人机的充电机插口;
振动锤,促使无人机摆正位置,以实现无人机的充电机插口与磁吸式充电接口相连接;
控制器,包含机巢网络模块、控制器网络模块、控制器控制模块、振动锤控制模块、充电控制模块、无人机控制模块和机巢控制模块。
作为上述技术方案的进一步描述:
所述控制器还包括机巢顶盖控制模块。
作为上述技术方案的进一步描述:
所述无人机停机坪呈盆状设置。
综上所述,由于采用了上述技术方案,本发明的有益效果是:
本发明中,停机坪呈盆状设置,无人机降落在停机坪中,在振动锤的作用下,促使无人机摆正位置,在摆正位置的过程中,无人机改装暴露的充电机插口与磁吸式充电接口相连接,在充电集成箱的作用下,可进行充电作业,相比现有技术中依靠传感器的降落方式,机巢生产的技术难度和工艺难度大大降低,同时机巢的成本也大大降低,使得机巢具备大规模推广的基础。
附图说明
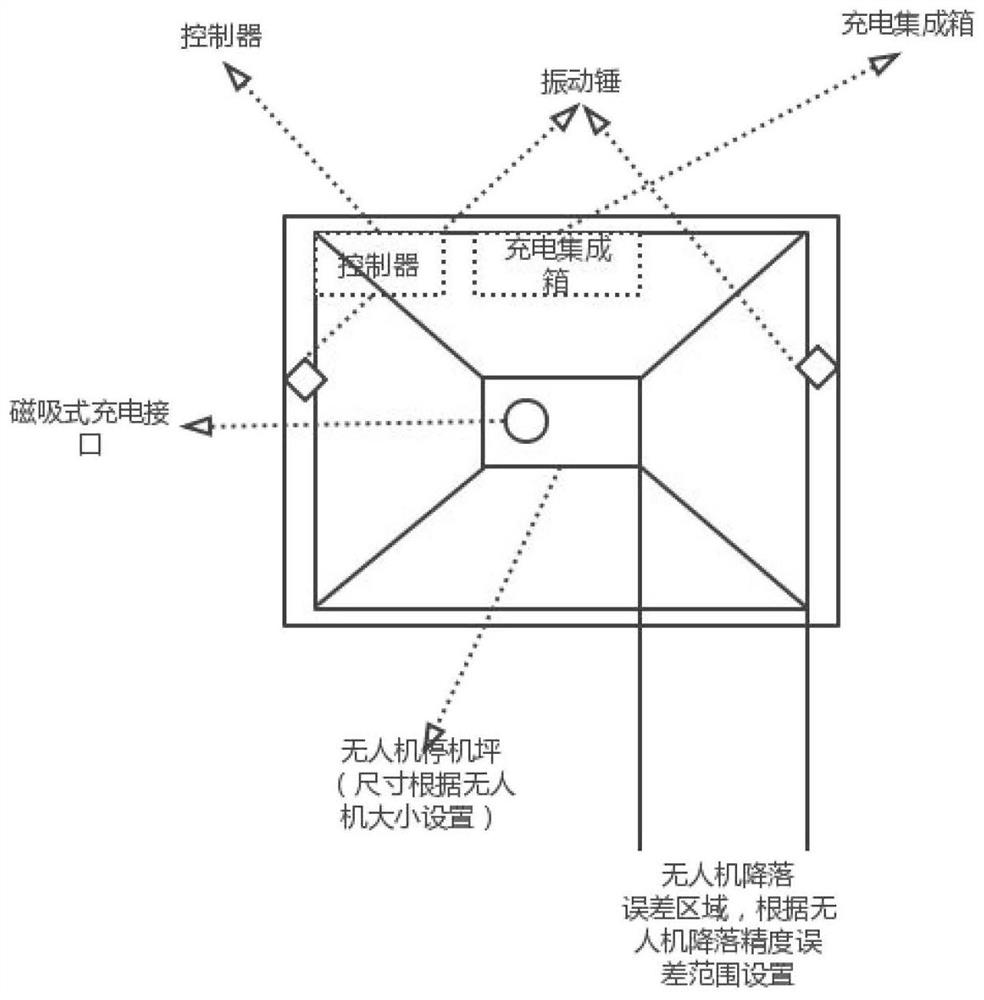
图1示出了根据本发明实施例提供的机巢俯视结构示意图;
图2示出了根据本发明实施例提供的无人机放飞流程示意图
图3示出了根据本发明实施例提供的无人机降落流程示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
请参阅图1-3,本发明提供一种技术方案:一种无人机的降落回收系统,包括:
机巢以及充电机插口改装暴露的无人机,充电机插口位于无人机的底部;
机巢包括:
渐缩型无人机停机坪,用于接收降落的无人机;
充电集成箱,用于控制输出电流,以实现对无人机的供电,充电集成箱安装在停机坪的内部;
磁吸式充电接口,用于连接无人机的充电机插口,磁吸式充电接口靠近停机坪的中心位置;
振动锤,促使无人机摆正位置,以实现无人机的充电机插口与磁吸式充电接口相连接,振动锤安装在停机坪的外侧壁上;
控制器,包含机巢网络模块、控制器网络模块、控制器控制模块、振动锤控制模块、充电控制模块、无人机控制模块和机巢控制模块。
控制器还包括机巢顶盖控制模块,机巢顶盖控制模块用于控制机巢顶盖的开闭。
无人机停机坪呈盆状设置,在振动锥振动的过程中,无人机向停机坪的中心处靠拢。
工作原理:
无人机在放飞时:首先控制人员可通过服务器终端发布指令给机巢网络模块,机巢网络模块可以通过给机巢的机巢顶盖控制模块和无人机控制模块发送指令控制机巢顶盖启动和无人机开机。待无人机和机巢全部启动完毕可通过控制器网络模块给服务器终端回传信号显示机巢和无人机状态。如无人机和机巢状态良好,可通过服务器终端给机巢控制模块发送巡检任务,机巢网络模块接收到任务后会将任务传输给无人机控制模块,无人机控制模块接收到任务后会从无人机遥控手柄中获取当前无人机电量续航数据,如果电池续航时间足够,无人机控制模块会将任务发送给无人机,无人机起飞执行任务。如续航时间不允许则回传信号给控制器网络模块,控制器网络模块再回传信号给服务器终端告知电池续航时间不足,任务等待执行。当电池续航时间足够后,控制器控制模块会通过控制器网络模块给服务器终端发送指令询问是否继续执行等待任务,如选择执行,则无人机继续执行任务,如不执行则无人机放弃任务。当无人机放弃执行等待任务后服务器终端可以重新给无人机发送任务。
无人机在降落时:当无人机执行完任务后会原路返回降落至机巢的停机坪中(无人机降落地点与起飞地点误差一般在0.1米),无人机降落完毕后(桨叶停止旋转)控制器中的无人机控制模块可以从无人机控制手柄中获取当前无人机状态,当无人机状态代码为0(为0即无人机停止)时,无人机控制模块会获取控制器中的充电感应模块当前状态,如果状态显示为0(0表示未充电)时,无人机控制模块会给振动锤控制模块发送指令启动振动锤促使无人机摆正位置,当无人机的磁吸式充电接口与停机坪中的磁吸式充电接口连接时(此时无人机处于开机状态不能充电),充电控制模块的状态码会改变成“1”并回传给无人机控制模块和控制器网络模块。无人机控制模块会控制振动锤控制模块,使得振动锤停止震动。控制器网络模块会控制无人机手柄读取无人机中的影像数据并回传给服务器,当无人机全部影像数据全部获取完毕,控制器网络模块会控制无人机控制手柄清空无人机内存并控制无人机关机。当控制器网络模块获取到无人机手柄中的无人机状态显示为关机状态后,会发送指令给充电控制模块和机巢顶盖控制模块,给无人机充电并关闭机巢顶盖。等待机巢关闭后机巢网络模块会将状态信息回传至服务器终端,改变服务器终端中该机巢的状态(将执行任务改为等待任务)。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种无人机安全降落系统及具有该降落系统的无人机
- 一种无人机降落伞装置以及无人机降落系统