一种双头点焊机构
文献发布时间:2023-06-19 12:08:44
技术领域
本发明属于点焊机领域,具体涉及一种双头点焊机构。
背景技术
点焊机采用双面双点过流焊接的原理,工作时两个电极加压工件使两层金属在两电极的压力下形成一定的接触电阻,而焊接电流从一电极流经另一电极时在两接触电阻点形成瞬间的热熔接,且焊接电流瞬间从另一电极沿两工件流至此电极形成回路,不伤及被焊工件的内部结构。
汽车吸能盒是有两部分焊接而成的,传统焊接设备单次只能对其中一面进行焊接,然后将工件翻转再对另一面进行焊接,这种焊接方式导致焊接效率低下,不能满足生产节奏。
发明内容
本发明所要解决的技术问题是针对现有技术的现状,而提供一种双头点焊机构。
本发明解决上述技术问题所采用的技术方案为:提出一种双头点焊机构,包括:工作台;
点焊机构,其活动设置于所述工作台上,所述点焊机构端部转动设置有第一点焊头以及第二点焊头,所述第一点焊头与所述第二点焊头对立设置,点焊机构端部设置有通电电极,所述通电电极位于所述第一点焊头与所述第二点焊头之间;
第一夹持机构,其设于所述工作台上,所述第一夹持机构上活动设置有第一夹紧单元;
第二夹持机构,其与所述工作台活动连接且与所述第一夹持机构对立设置,所述第二夹持机构上活动设置有第二夹紧单元。
在上述的一种双头点焊机构中,所述点焊机构包括:焊头移动件,其与所述工作台活动连接;
焊头支撑架,其设于所述焊头移动件上,所述第一点焊头、第二点焊头以及通电电极均设置于所述焊头支撑架上。
在上述的一种双头点焊机构中,所述焊头移动件包括:滑块,其与所述工作台滑动连接,所述焊头支撑架与所述滑块上端连接;
丝杠,其与所述工作台转动连接,所述焊头支撑架下端与所述丝杠螺纹连接,所述丝杠连接有电机,所述电机与所述工作台连接。
在上述的一种双头点焊机构中,所述焊头支撑架上设置有转接架,所述通电电极与所述转接架连接,所述第一点焊头以及所述第二点焊头分别与转接架的上下两端转动连接,所述转接架上端转动设置有第一点焊气缸,所述第一点焊气缸与所述第一点焊头转动连接,所述转接架下端上转动设置有第二点焊气缸,所述第二点焊气缸与所述第二点焊头转动连接。
在上述的一种双头点焊机构中,所述第一夹持机构包括:第一支架,其与所述工作台连接,所述第一支架上设置有第一抵靠气缸,所述第一抵靠气缸端部设置有第一抵靠块,所述第一抵靠块上设置有第一定位柱,所述第一夹紧单元与所述第一支架连接。
在上述的一种双头点焊机构中,所述第一夹紧单元包括:第一夹紧气缸,其与所述第一支架连接,所述第一夹紧气缸端部转动连接有第一夹紧板,所述第一夹紧板与所述第一支架转动连接,当所述第一夹紧气缸工作时能够带动所述第一夹紧板靠近或者远离所述第一抵靠块。
在上述的一种双头点焊机构中,所述第二夹持机构包括:第二支架,其与所述工作台连接,所述第二支架上滑动连接有滑动板,所述工作台上设置有滑动气缸,所述滑动气缸与所述滑动板连接,所述滑动板上设置有第二抵靠气缸,所述第二抵靠气缸端部设置有第二抵靠块,所述第二抵靠块上设置有第二定位柱,所述第二夹紧单元与所述第二支架连接。
在上述的一种双头点焊机构中,所述第二夹紧单元包括:第二夹紧气缸,其与所述第二支架连接,所述第二夹紧气缸端部转动连接有第二夹紧板,所述第二夹紧板与所述第二支架转动连接,当所述第二夹紧气缸工作时能够带动所述第二夹紧板靠近或者远离所述第二抵靠块。
与现有技术相比,本发明的优点在于该双头点焊机构能够同时对吸能盒的两面进行点焊,保证了工作效率,无需反复翻转工件,减少操作人员的劳动强度。
附图说明
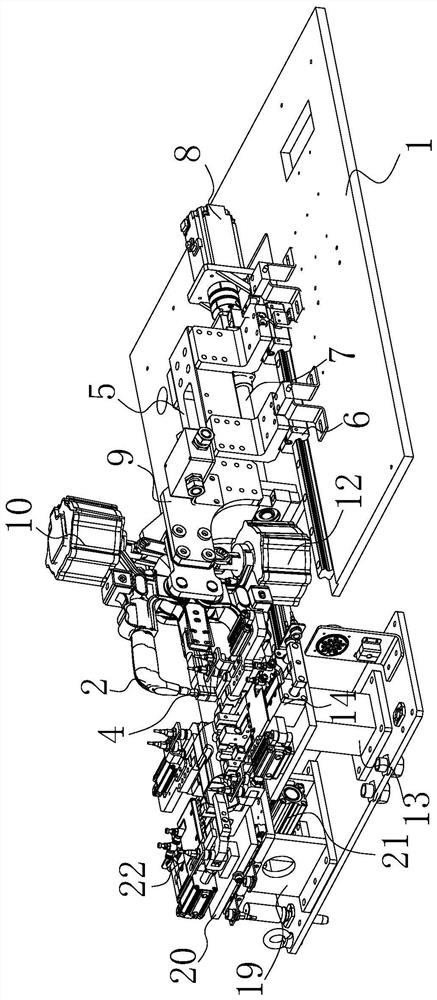
图1是本双头点焊机构加工工件时的立体视图;
图2是第一夹持机构与第二夹持机构的立体视图;
图3是点焊机构的立体视图。
图中,1、工作台;2、第一点焊头;3、第二点焊头;4、通电电极;5、焊头支撑架;6、滑块;7、丝杠;8、电机;9、转接架;10、第一点焊气缸;12、第二点焊气缸;13、第一支架;14、第一抵靠气缸;15、第一抵靠块;16、第一定位柱;17、第一夹紧气缸;18、第一夹紧板;19、第二支架;20、滑动板;21、滑动气缸;22、第二抵靠气缸;23、第二抵靠块;24、第二定位柱;25、第二夹紧气缸;26、第二夹紧板。
具体实施方式
以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
如图1至图3所示,本双头点焊机构,包括:工作台1;点焊机构,其活动设置于工作台1上,点焊机构端部转动设置有第一点焊头2以及第二点焊头3,第一点焊头2与第二点焊头3对立设置,点焊机构端部设置有通电电极4,通电电极4位于第一点焊头2与第二点焊头3之间;第一夹持机构,其设于工作台1上,第一夹持机构上活动设置有第一夹紧单元;第二夹持机构,其与工作台1活动连接且与第一夹持机构对立设置,第二夹持机构上活动设置有第二夹紧单元。
点焊机构端部设置有第一点焊头2和第二点焊头3,通电电极4位于第一点焊头2和第二点焊头3之间,当第一点焊头2和第二点焊头3向通电电极4靠近直至与通电电极4接通时就能够实现点焊,第一夹持机构和第二夹持机构均设置于工作台1上且对立设置,第一夹紧单元和第二夹紧单元能够分别夹紧一部分工件,且第二夹持机构活动设置于工作台1上,当工件夹紧后,第二夹持机构带动一部分工件向另一部分工件移动,直至两部分工件贴合在一起,然后点焊机构向前移动,使得通电电极4插入至工件内,然后第一点焊头2和第二点焊头3同时向工件靠近,直至两者抵靠于工件的两个面上,通电电极4通电,通过工件导电进而实现两面同时点焊,点焊完成后,第一点焊头2和第二点焊头3转动远离工件,进而方便点焊机构脱离工件。
点焊机构包括:焊头移动件,其与工作台1活动连接;焊头支撑架5,其设于焊头移动件上,第一点焊头2、第二点焊头3以及通电电极4均设置于焊头支撑架5上。
焊头移动件能够带动焊头支撑架5移动,进而能够使得通电电极4插入或者脱离工件,方便点焊前两个贴紧以及点焊后取出工件。
焊头移动件包括:滑块6,其与工作台1滑动连接,焊头支撑架5与滑块6上端连接;丝杠7,其与工作台1转动连接,焊头支撑架5下端与丝杠7螺纹连接,丝杠7连接有电机8,电机8与工作台1连接。
滑块6能够在工作台1上滑动,丝杠7与焊头支撑架5螺纹连接,当丝杠7转动时就能够带动焊头支撑架5前后移动,电机8能够带动丝杠7正转或者反转,进而实现焊头支撑架5的向前或者向后移动。
焊头支撑架5上设置有转接架9,通电电极4与转接架9连接,第一点焊头2以及第二点焊头3分别与转接架9的上下两端转动连接,转接架9上端转动设置有第一点焊气缸10,第一点焊气缸10与第一点焊头2转动连接,转接架9下端上转动设置有第二点焊气缸12,第二点焊气缸12与第二点焊头3转动连接。
转接架9用于连接通电电极4、第一点焊头2以及第二点焊头3,第一点焊头2和第二点焊头3分别转动连接于转接架9的上下两端,所以第一点焊头2和第二电焊头能够相互靠近或者相互远离,实现点焊动作,第一点焊头2通过第一点焊气缸10带动转动,第二点焊头3通过第二点焊气缸12带动工作。
第一夹持机构包括:第一支架13,其与工作台1连接,第一支架13上设置有第一抵靠气缸14,第一抵靠气缸14端部设置有第一抵靠块15,第一抵靠块15上设置有第一定位柱16,第一夹紧单元与第一支架13连接。
第一抵靠气缸14能够带动第一抵靠块15移动,进而使得第一定位柱16插入至工件内,对工件起到定位作用,然后第一抵靠块15能够抵靠于工件侧面,第一夹紧单元与第一支架13连接,当工件定位完成后,第一夹紧单元端部向第一抵靠块15移动,在第一夹紧单元和第一抵靠块15的共同作用下将工件牢牢夹紧。
第一夹紧单元包括:第一夹紧气缸17,其与第一支架13连接,第一夹紧气缸17端部转动连接有第一夹紧板18,第一夹紧板18与第一支架13转动连接,当第一夹紧气缸17工作时能够带动第一夹紧板18靠近或者远离第一抵靠块15。
第一夹紧气缸17能够前后伸缩,带动第一夹紧板18绕其与第一支架13连接处转动,进而能够使得第一夹紧板18另一端靠近或者远离第一抵靠块15,起到夹紧或者松开工件的目的。
第二夹持机构包括:第二支架19,其与工作台1连接,第二支架19上滑动连接有滑动板20,工作台1上设置有滑动气缸21,滑动气缸21与滑动板20连接,滑动板20上设置有第二抵靠气缸22,第二抵靠气缸22端部设置有第二抵靠块23,第二抵靠块23上设置有第二定位柱24,第二夹紧单元与第二支架19连接。
滑动板20能够被滑动气缸21带动滑动,进而起到带动一部分工件靠近另一部分工件的目的,方便后续的焊接工作,并且在向第一夹持机构和第二夹持机构分别放入一部分工件时更加容易。
第二夹紧单元包括:第二夹紧气缸25,其与第二支架19连接,第二夹紧气缸25端部转动连接有第二夹紧板26,第二夹紧板26与第二支架19转动连接,当第二夹紧气缸25工作时能够带动第二夹紧板26靠近或者远离第二抵靠块23。
第二夹紧气缸25能够前后伸缩,带动第二夹紧板26绕其与第二支架19连接处转动,进而能够使得第二夹紧板26另一端靠近或者远离第二抵靠块23。
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后……)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
另外,在本发明中如涉及“第一”、“第二”、“一”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
另外,本发明各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
- 一种双头点焊机构
- 一种全自动高速双头点焊机的焊接机构