环境条件存储装置、环境条件存储方法、操作装置和环境识别装置
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及环境条件存储装置、环境条件存储方法、操作装置和环境识别装置。
背景技术
以往,开发了对自己体验过的环境进行再现的装置。例如,在专利文献1(日本特开2003-299013号公报)中公开了能够以具有临场感的方式再次体验体验者体验过的事件的体验信息再现装置。
发明内容
发明要解决的课题
但是,在专利文献1中,无法再现反映了人内在具有的感官取向的环境。
用于解决课题的手段
第1观点的环境条件存储装置具有环境条件取得部、触觉信息取得部和存储部。环境条件取得部取得包含温度、湿度、风、图像、影像、声音中的至少一方的环境条件。触觉信息取得部取得表示触觉的信息即触觉信息。存储部将环境条件和触觉信息关联起来进行存储。因此,能够生成进一步反映了人内在具有的感官取向的与触觉对应的环境。
第2观点的环境条件存储装置在第1观点的环境条件存储装置中,环境条件存储装置还具有提供多个触觉的提供部。触觉信息取得部识别多个触觉中由用户选择出的触觉,由此取得表示选择出的触觉的信息即触觉信息。因此,能够生成与触觉对应的环境。
第3观点的环境条件存储装置在第2观点的环境条件存储装置中,根据由提供部提供的触觉的接触次数和由提供部提供的触觉的接触时间中的至少一方,识别由用户选择出的触觉。因此,能够更加具体地掌握基于触觉的人的感官取向。
第4观点的环境条件存储方法存储环境条件,该环境条件存储方法包含以下步骤:第1步骤,取得包含温度、湿度、风、图像、影像、声音中的至少一方的环境条件以及表示触觉的信息即触觉信息;以及第2步骤,将环境条件和触觉信息关联起来存储在存储部中。因此,能够生成接近人内在具有的感官取向的与触觉对应的环境。
第5观点的环境条件存储方法在第4观点的环境条件存储方法中,环境条件存储方法还包含第3步骤,在该第3步骤中,在提供触觉后,识别由用户选择出的触觉,第1步骤包含:识别第3步骤中选择出的触觉,由此取得表示选择出的触觉的信息即触觉信息。因此,能够生成与触觉对应的环境。
第6观点的环境条件存储方法在第5观点的环境条件存储方法中,第3步骤包含:根据提供的多个触觉的接触次数和接触时间中的至少一方,识别由用户选择出的触觉。因此,能够更加具体地掌握基于触觉的人的感官取向。
第7观点的操作装置对根据环境条件在对象空间生成规定的环境的环境生成装置进行操作,其中,操作装置具有提供部、识别部、处理部和通信部。提供部具有一个或多个接触面,提供多个触觉。识别部识别多个触觉中由用户选择出的触觉。处理部决定与由识别部识别出的触觉对应的环境条件。通信部将由处理部决定的环境条件发送到环境生成装置。因此,能够提供用于根据触觉在对象空间生成规定的环境的操作装置。
第8观点的操作装置在第7观点的操作装置中,进一步地,识别部根据由提供部提供的触觉的接触次数和由提供部提供的触觉的接触时间中的至少一方,识别由用户选择出的触觉。因此,能够更加具体地掌握基于触觉的人的感官取向。
第9观点的操作装置在第7观点或第8观点的操作装置中,提供部具有由不同的材料形成的多个接触面。
第10观点的操作装置在第7观点或第8观点的操作装置中,提供部使一个或多个接触面产生振动,由此提供多个不同的触觉。
第11观点的操作装置在第7观点或第8观点的操作装置中,提供部对一个或多个接触面的温度或湿度进行控制,由此提供多个不同的触觉。
第12观点的操作装置在第7观点或第8观点的操作装置中,提供部使一个或多个接触面产生电压或电流,由此提供多个不同的触觉。
第13观点的操作装置在第7观点或第8观点的操作装置中,提供部使一个或多个接触面产生磁力,由此提供多个不同的触觉。
第14观点的操作方法对根据环境条件在对象空间生成规定的环境的环境生成装置进行操作,其中,操作方法包含以下步骤:在提供触觉后识别由用户选择出的触觉;决定与识别出的触觉对应的环境条件;以及将决定的环境条件发送到环境生成装置。因此,能够实现用于根据触觉在对象空间生成规定的环境的操作方法。
第15观点的操作方法在第14观点的操作方法中,识别由用户选择出的触觉的步骤包含:根据由提供部提供的触觉的接触次数和由提供部提供的触觉的接触时间中的至少一方,识别由用户选择出的触觉。因此,能够更加具体地掌握基于触觉的人的感官取向。
第16观点的环境识别装置具有提供部、识别部和处理部。提供部具有一个或多个接触面,提供多个触觉。识别部识别多个触觉中由用户选择出的触觉。处理部决定与由识别部识别出的触觉对应的环境条件。因此,能够根据触觉对用于在对象空间生成规定的环境的环境条件进行分类。
第17观点的环境识别装置在第16观点的环境识别装置中,进一步地,识别部根据由提供部提供的触觉的接触次数和由提供部提供的触觉的接触时间中的至少一方,识别由用户选择出的触觉。因此,能够更加具体地掌握基于触觉的人的感官取向。
附图说明
图1是用于说明环境生成系统1的结构的示意图。
图2是用于说明控制装置20的结构的示意图。
图3是用于说明存储部21中存储的信息的示意图。
图4是用于说明环境生成系统1的动作的流程图。
图5是用于说明变形例B的环境生成系统1的结构的示意图。
图6是用于说明变形例B的控制装置20的结构的示意图。
图7是用于说明优先级的示意图。
图8A是用于说明决定优先级的处理的流程图。
图8B是用于说明决定优先级的处理的流程图。
图9是用于说明第1聚类分类装置50的结构的示意图。
图10是用于说明聚类的概念的示意图。
图11是用于说明第1聚类分类装置50的动作的流程图。
图12是用于说明第1聚类分类装置50的变形例的结构的示意图。
图13是用于说明第2聚类分类装置60的结构的示意图。
图14是用于说明第2聚类分类装置60的动作的流程图。
图15是用于说明第2聚类分类装置60的变形例的结构的示意图。
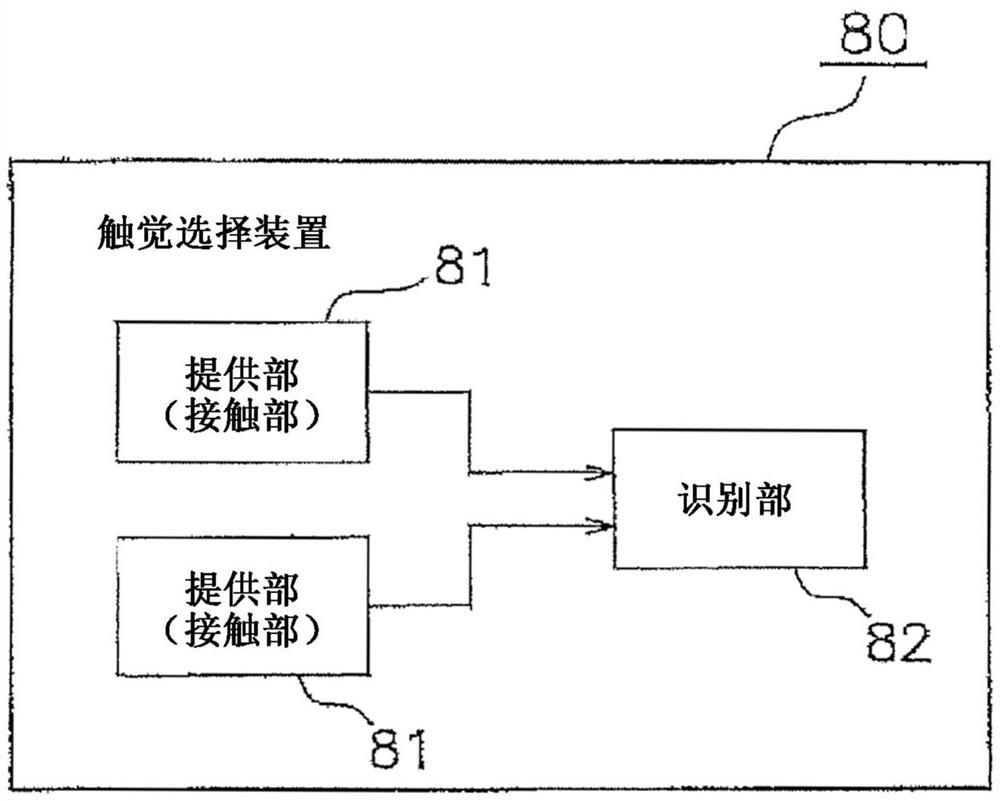
图16是用于说明触觉选择装置80的结构的示意图。
图17是用于说明触觉选择装置80的外观的一例的示意图。
图18是示出操作装置85的结构的示意图。
图19是示出输入辅助装置的界面的一例的示意图。
图20是示出使用了输入辅助装置的实验结果的图。
图21是验证了基于触觉的环境生成的效果的实验结果的曲线图。
图22是验证了基于触觉的环境生成的效果的实验结果的曲线图。
图23示出表示根据触觉而自动生成的影像(环境)的评价结果的矩阵。
图24示出表示根据触觉而自动生成的影像(环境)的评价结果的矩阵。
具体实施方式
(1)环境生成系统
(1-1)环境生成系统的结构
如图1所示,本实施方式的环境生成系统1具有环境生成装置10和控制装置20。
(1-1-1)环境生成装置
环境生成装置10是能够使对象空间S的环境变化而生成规定的环境的任意设备。作为环境生成装置10使环境变化的结果,对对象空间S内的用户5的感觉带来特定的影响。具体而言,作为环境生成装置10的结构设备,举出空调装置、照明装置、投影仪、扬声器、气味发生器等。例如,在图1中,示出作为环境生成装置10的投影仪向对象空间S的壁面投影大量显示物R而成为新的外观的状况。换言之,在图1所示的例子中,通过投影映射使房间的内装变化。此外,作为环境生成装置10,也可以将机器人配置于对象空间S,该情况下,机器人至少使发光的颜色、动作、形状、声音变化。
详细地讲,环境生成装置10根据与后述的聚类对应的环境条件,在对象空间S生成规定的环境。
“环境条件”是表征对人的身体和/或心境带来特定的影响的物理量的参数。例如,环境条件由包含温度、湿度、风、图像、影像、声音等中的至少一方的物理量(环境条件的特征的例子)来定义,与其对应地,环境生成装置10的结构设备进行动作。然后,环境生成装置10使环境变化,由此对人的感觉带来特定的影响。
“特定的影响”是指用户5的五感被唤起规定的感觉的作用。例如,作为特定的影响,举出被唤起迷人感(增加了对日常生活中可能忘记的感觉的敏感性的感觉)、紧张感(做某事时被人看着而有干劲的感觉)、拥抱感(拥抱心灵的充满温暖和平静的感觉)、开放感(在宽敞的场所中进行深呼吸的感觉)、起航感(迈出新的一步时被贴心地支持的感觉)、旅行感(稍微寂寞但是浪漫的感觉)等感觉的任意的环境变化。此外,特定的影响能够由任意的语言来表达,可以利用“快乐的环境”、“能够集中的环境”、“具有开放感的环境”这样的一般观念的用语来表达。此外,特定的影响也可以利用“被毛毯包围的空气流动的环境”、“派对的空气流动的环境”、“彩虹颜色的空气流动的环境”、光滑感(Tsurutsuru)、粗糙感(Zarazara)、柔软感(Fuwafuwa)等与触觉有关的拟声词/拟态词这样的概念不一定明确的用语来表达。
另外,通过对存在于对象空间S内的用户5抱有的印象等进行累计,能够定义特定的影响与环境条件的对应关系。
(1-1-2)控制装置
控制装置20对环境生成装置10进行控制。控制装置20能够由任意的计算机实现,如图2所示,具有存储部21、输入部22、处理部23、控制部24和输出部25。这里,通过在计算机的CPU、GPU等中读入存储装置(ROM、RAM等)中存储的程序,实现上述各功能。但是不限于此,控制装置20也可以使用LSI(Large Scale Integration:大规模集成电路)、ASIC(Application Specific Integrated Circuit:专用集成电路)、FPGA(Field-Programmable Gate Array:现场可编程门阵列)等而作为硬件来实现。
存储部21存储各种信息,由存储器和硬盘等任意的存储装置实现。这里,存储部21将聚类的特征和环境条件关联起来进行存储。详细地讲,聚类由利用n维(n是环境条件的参数的数量)信息表示的空间中的环境条件的集合构成。或者,聚类由利用n维信息表示的空间中的包含环境条件的区域构成。而且,各聚类设定有固有的特征。例如,如图3所示,在存储部21中存储有表示包含温度、湿度、风、图像、影像、声音等中的至少一方的物理量的信息作为n维信息。这些值通过规定的聚类的方法被群组化为一个聚类,设定聚类的特征。此外,这里所说的聚类的特征对应于上述特定的影响。在图3所示的例子中,设定“快乐的环境”作为聚类1的特征,设定“能够集中的环境”作为聚类2的特征,设定“具有开放感的环境”作为聚类3的特征等。此外,多个环境条件属于各聚类。在图3所示的例子中,环境条件1~3属于聚类1,环境条件4~6属于聚类2,环境条件7~9属于聚类3。此外,还能够进一步对聚类进行细分来定义新的聚类。此外,在图3所示的例子中,例如当追加新的环境条件10时,也可以利用聚类3的环境条件7~9中的环境条件7、8以及新的环境条件10定义新的聚类。该新的聚类可以标注“快活的环境”等新的特征的标签。
输入部22经由具有键盘、鼠标、触摸面板等的任意的终端装置30受理各种信息的输入。这里,输入部22受理与聚类的特征对应的输入。例如,输入部22从以任意形式显示的列表中,受理与一个聚类的特征对应的输入。终端装置30也可以是图16~图18所示的触觉选择装置80或应用了触觉选择装置80的操作装置85。
处理部23执行各种信息处理,由CPU或GPU这样的处理器和存储器实现。具体而言,处理部23具有选择属于聚类的环境条件中的一个环境条件的功能。更详细地讲,处理部23以规定的条件随机地选择属于同一聚类内的其它环境条件。此外,当满足规定的条件时,处理部23将当前的环境条件变更为同一聚类内的其它环境条件。另外,规定的条件例如是指经过了规定时间的状态、或未从对象空间S内的用户5得到规定的反应的状态。
控制部24对环境生成装置10进行控制。具体而言,控制部24根据上述的聚类的特征,从存储部21中提取用于对环境生成装置10进行控制的环境条件,根据该环境条件对环境生成装置10进行控制。
输出部25根据输出目的地来输出用于对环境生成装置10进行控制的控制信息。例如,输出部25在输出目的地是用户5的终端装置30的情况下,转换为与该终端装置30的用户界面对应的显示方式而输出控制信息。
(1-2)环境生成系统的动作
图4是用于说明本实施方式的环境生成系统1的动作的流程图。
首先,经由输入部22受理与用于生成对象空间S的环境的聚类的特征对应的输入(S1)。这里,在用户5的终端装置30中显示预先定义了多个与聚类的特征对应的输入信息的下拉菜单形式等的列表。接着,用户5经由终端装置30从该列表中选择与一个聚类的特征对应的输入信息。如果是与图3对应的例子,则在列表上以能够选择的状态显示“快乐的环境”、“能够集中的环境”、“具有开放感的环境”等。这里,假设用户5经由终端装置30选择“快乐的环境”。由此,通过输入部22输入“快乐的环境”作为聚类的特征。
接着,响应于输入部22进行的与聚类的特征对应的输入的受理,通过处理部23选择属于该聚类的环境条件中的一个环境条件(S2)。在与图3对应的例子中,“环境条件1”、“环境条件2”、“环境条件3”属于“快乐的环境”即聚类1,通过处理部23从它们中随机地选择一个环境条件。这里,假设通过处理部23选择“环境条件1”。
接着,根据由处理部23选择出的环境条件,通过控制部24执行环境生成装置10的控制(S3)。由此,在对象空间S生成规定的环境。如果是图3所示的例子,则根据环境条件1对环境生成装置10进行控制。
然后,对环境生成装置10进行控制,直到环境生成装置10的控制结束为止(S4)。这里,在环境生成装置10的控制结束前经过了规定时间的情况下,通过处理部23选择属于同一聚类的其它环境条件(S4-否、S5-是、S6)。如果是与图3对应的例子,则通过处理部23随机地选择属于同一聚类1的其它“环境条件2”、“环境条件3”中的一个环境条件。其结果是,这里假设通过处理部23选择“环境条件2”。
然后,根据由处理部23选择出的其它环境条件,通过控制部24执行环境生成装置10的控制(S7)。如果是与图3对应的例子,则根据环境条件2对环境生成装置10进行控制。另外,在进一步经过了规定时间的情况下,从环境条件2变更为环境条件3,根据环境条件3对环境生成装置10进行控制。
(1-3)特征
如以上说明的那样,本实施方式的控制装置20将用于构建对人的身体和/或心境带来特定的影响的环境的环境条件所属的多个聚类和聚类的特征关联起来存储在存储部21中。进而,控制装置20响应于与聚类的特征对应的输入的受理,对将对象空间S生成为规定的环境的环境生成装置10进行控制。其结果是,控制装置20能够构建使用户5产生各种感情的环境。
此外,本实施方式的控制装置20根据以规定的条件选择出的环境条件对环境生成装置10进行控制,因此,能够构建不统一的环境。特别地,处理部23以规定的条件选择属于同一聚类内的其它环境条件,因此,能够避免对象空间S内的用户5习惯于规定的环境。
例如,通过使用本实施方式的控制装置20,在生成“提升感高的环境”的环境条件1和生成“幸福感高的环境”的环境条件2属于“快乐的环境”的聚类的情况下,控制装置20通过适当变更环境条件1和环境条件2,能够提供不仅快乐、而且提升感高、或幸福感高的环境。
(1-4)变形例
(1-4-1)变形例A
在上述说明中,在输入部22受理与聚类的特征对应的输入时,利用以任意形式显示的列表,但是,本实施方式的控制装置20不限于此。例如,输入部22在受理与聚类的特征对应的输入时,也可以受理用户5进行的文本的输入。该情况下,处理部23通过规定的算法进行文本解析,根据用户5进行的文本的输入来设定聚类的特征。
此外,输入部22也可以受理包含与触觉有关的拟声词/拟态词在内的拟声词/拟态词等与人的感觉相关的表达的输入。该情况下,处理部23通过规定的算法进行解析,根据用户5进行的与拟声词/拟态词对应的感觉的输入来设定聚类的特征。此外,输入部22也可以通过后述的触觉选择装置80受理基于触觉(素材)的输入。
(1-4-2)变形例B
在上述说明中,当经过规定时间时,处理部23随机地变更环境条件,但是,本实施方式的控制装置20不限于此。本实施方式的控制装置20也可以代替规定时间而在不满足规定的条件的情况下变更环境条件。
例如,如图5所示,将由任意的活体传感器、摄像装置、录音装置、接触装置、机器人中的任意一方或它们的任意组合等构成的环境识别装置70设置于对象空间S。进而,如图6所示,控制装置20的计算机还作为反应取得部26发挥功能,该反应取得部26从环境识别装置70收集存在于对象空间S的用户5的身体状况、表情、行动、言行等信息,取得表示存在于对象空间S中的用户5的反应的反应信息。解析部28根据由反应取得部26取得的反应信息进行用户的表情分析等解析。然后,处理部23根据解析部28的解析结果来变更环境条件。
具体而言,假设聚类的特征为“快乐的环境”。此外,假设通过解析部28进行对象空间S内的用户5的表情解析。进而,在解析部28的解析结果中笑脸的图像量超过规定量的情况下,处理部23判定为以当前的环境条件生成的环境对该对象空间S内的用户5带来期待的影响,以维持当前的环境条件的方式进行控制。根据这种结构,能够生成与存在于对象空间S的用户5的反应对应的环境。
另外,环境识别装置70不需要固定于对象空间S,也可以是健身追踪器等佩戴于用户5的装置。
(1-4-3)变形例C
在上述说明中,当经过规定时间时,处理部23随机地变更为下一个环境条件,但是,本实施方式的控制装置20不限于此。例如,控制装置20的处理部23也可以是,当经过了规定时间时,根据优先级而变更为下一个环境条件。另外,如图7所示,优先级按照每个聚类来设定。此外,优先级还能够随时下载并更新。
此外,也可以根据用户5的使用状况而适当地学习优先级。进而,也可以根据用户5的个人信息而适当地学习优先级。
(1-4-4)变形例D
本实施方式的控制装置20的处理部23也可以具有决定上述环境条件的优先级的功能。具体而言,控制装置20还具有上述反应取得部26。此外,处理部23还具有如下功能:根据由反应取得部26取得的反应信息(表示存在于对象空间S中的用户5的反应的信息),决定属于各聚类的环境条件的优先级。
关于优先级的决定,使用图8所示的流程图进行说明。
首先,在控制装置20中,选择优先级决定模式(T1)。接着,受理与聚类的特征对应的输入(T2)。这里,假设输入“快乐的环境”作为聚类的特征。然后,以规定的环境条件N对环境生成装置10进行控制(T3、T4、T5)。在优先级设定模式时,通过反应取得部26取得对象空间S内的用户5的表情等作为反应信息(T6)。然后,通过解析部28进行反应信息的解析(T7)。这里,通过解析部28进行用户5的表情解析等。处理部23根据表情解析等的结果判定是否满足规定的条件(T8)。这里,处理部23根据表情解析等的结果,例如在笑脸的图像量超过规定量的情况下(T8-是),判定为以当前的环境条件N生成的环境对该对象空间S内的用户5带来特定的影响,以优先级的值变高的方式进行更新(T9)。另一方面,处理部23根据表情解析等的结果,在笑脸的图像量未超过规定量的情况下(T8-否),判定为以当前的环境条件N生成的环境未对该对象空间S内的用户5带来特定的影响,不变更优先级的值,或者以降低优先级的值的方式进行更新(T10)。然后,在优先级决定模式的状态下经过规定时间时,以下一个环境条件N+1对环境生成装置10进行控制(T11-否、T12-是、T13、T4)。然后,对环境条件的优先级进行更新,直到优先级决定模式被解除为止。然后,优先级根据优先级决定模式的时间的长度而收敛。
另外,优先级的决定或更新可以是实时处理,也可以是定期地对由反应取得部26取得的反应信息进行解析的批处理。
(1-4-5)变形例E
在上述说明中,当经过规定时间时,处理部23随机地变更环境条件,但是,本实施方式的控制装置20不限于此。例如,也可以通过用户5对输入部22的操作,在任意的定时变更环境条件。
进而,本实施方式的控制装置20也可以是,处理部23根据环境条件的选择次数,决定属于聚类的环境条件的优先级。由此,优先级收敛,以便根据用户5对控制装置20的使用时间,选择与用户5的意向相应的环境条件。另外,优先级的决定或更新可以是实时处理,也可以是定期地对由反应取得部26取得的信息进行解析的批处理。
(1-4-6)变形例F
在上述存储部21中,被存储的聚类的特征和环境条件能够随时更新。此外,能够根据被更新的信息对环境生成装置10进行控制。
具体而言,存储部21中存储的信息能够随时下载并更新。例如,在新定义了针对“派对的空气流动的环境”等特定的影响的环境条件的集合的情况下,能够将这些信息下载到存储部21进行利用。
(1-4-7)变形例G
在上述说明中,环境生成装置10和控制装置20为分体部件的装置,但是,它们也可以一体地组入同一装置中。
(2)聚类分类装置
上述的环境生成系统1所使用的环境条件能够使用聚类分类装置进行分类。下面,对事后设定聚类的特征的第1聚类分类装置50和事前设定聚类的特征的第2聚类分类装置60进行说明。
(2-1)第1聚类分类装置
(2-1-1)第1聚类分类装置的结构
首先,进行第1聚类分类装置50的说明。作为前提,假设通过控制装置20X对环境生成装置10进行控制,在对象空间S生成规定的环境。另外,控制装置20X具有与上述控制装置20相同的功能,但是,输入部22X还具有输入规定的环境条件的功能。为了便于说明,对控制装置20X中的与控制装置20不同的结构标注后缀X。
图9是用于说明第1聚类分类装置50的结构的示意图。第1聚类分类装置50能够由任意的计算机实现,具有环境条件取得部51、分类部52、设定部53和存储部54。这里,通过在计算机的CPU、GPU等中读入存储装置(ROM、RAM等)中存储的程序,实现第1聚类分类装置50的各功能。但是不限于此,第1聚类分类装置50也可以使用LSI(Large ScaleIntegration)、ASIC(Application Specific Integrated Circuit)、FPGA(Field-Programmable Gate Array)等而作为硬件来实现。
另外,第1聚类分类装置50和控制装置20X也可以不是分别独立的装置,而是一体地组入同一装置中。
环境条件取得部51取得用于在对象空间S生成规定的环境的环境条件。这里,通过终端装置30的操作,经由控制装置20X的输入部22X适当地输入环境条件,对环境生成装置10进行控制。因此,环境条件取得部51取得由控制装置20X的输入部22X输入的环境条件。
分类部52根据环境条件的特征对由环境条件取得部51取得的环境条件进行聚类,生成多个聚类。聚类包含环境条件的范围或多个环境条件的集合。关于聚类,能够适当地采用最佳的聚类方法(例如K-means法)。具体而言,分类部52对环境条件的多个参数(这里设为n个物理量)分别进行加权,在被加权的各参数生成的n维空间上,设定处于规定范围内的距离的环境条件作为同一聚类。例如,为了便于说明,在设为存在2个环境条件的参数时,如图10所示,在二维空间上描绘各环境条件1~9。在图10所示的例子中,通过分类部52以使这些环境条件1~9属于多个聚类1~3的方式进行分类。
设定部53经由任意的终端装置30等受理信息的输入,根据受理的信息,设定由分类部52分类的聚类的特征。这里,设定者能够自由地定义聚类的特征。例如,在存在聚类1、2、3时,通过设定部53的功能,设定者能够如聚类1的特征为“快乐的环境”、聚类2的特征为“能够集中的环境”、聚类3的特征为“具有开放感的环境”那样设定各聚类的特征。此外,也可以通过光滑感(Tsurutsuru)、粗糙感(Zarazara)、柔软感(Fuwafuwa)等与触觉有关的拟声词/拟态词的表达来设定聚类的特征。这里,通过贴上语言标签作为标签来进行聚类的特征的设定。另外,在各聚类的特征的设定中,仅贴上一个标签也没有问题,但是,也可以对1个聚类贴上多个标签。例如,1个聚类的特征也可以通过“快乐”这样的标签和“开放的”这样的标签来设定。
存储部54将聚类、聚类的特征和环境条件关联起来进行存储。通过将该存储部54中存储的信息写入任意的存储装置,能够构建上述环境生成系统1中的控制装置20的存储部21。
此外,如后所述,第1聚类分类装置50也可以作为包含上述存储装置的功能的环境条件存储装置发挥功能。
(2-1-2)第1聚类分类装置的动作
图11是用于说明第1聚类分类装置50的动作的流程图。
首先,环境生成装置10和控制装置20X在规定期间被多个用户无制约地使用。各用户使用终端装置30自由地变更环境条件,使用环境生成装置10和控制装置20X使对象空间S的环境变化(X1)。另外,也可以使用后述的触觉选择装置80或应用了触觉选择装置80的操作装置85输入触觉,由此自由地变更环境条件。
接着,进行使用环境生成装置10和控制装置20X的期间内使用的环境条件的解析。具体而言,通过分类部52对多个环境条件进行聚类,生成一个以上的聚类(X2)。
然后,设定者使用终端装置30等输入表示各聚类的特征的信息。各聚类的特征由设定者来定义。接受该信息,设定部53设定各聚类的特征(X3)。
由此,构建将聚类的特征和环境条件关联起来的数据库并将其存储在存储部54中(X4)。
如上所述,第1聚类分类装置50具有环境条件取得部51、分类部52、设定部53和存储部54。环境条件取得部51取得用于在对象空间S生成规定的环境的环境条件。分类部52将环境条件分类为多个聚类。设定部53设定聚类的特征。存储部54将聚类的特征和环境条件关联起来进行存储。总之,在第1聚类分类装置50中,将环境条件分类为多个聚类,并受理分类后的聚类的特征的设定。而且,由于具有上述结构,因此,在第1聚类分类装置50中,设定者能够事后设定聚类的特征。而且,能够基于此构建将聚类的特征和环境条件关联起来的数据库。
若进行补充,在第1聚类分类装置50中,将环境条件分类为规定的聚类并进行模型评价,并且,在环境条件被分类为新的聚类时,进行模型生成。换言之,在用户生成了无法分类为任意的现有聚类的环境条件的情况下,第1聚类分类装置50的分类部52追加新的聚类。
(2-1-3)变形例
在上述步骤X3中,代替设定者定义聚类的特征,还可以根据存在于对象空间S的用户5的反应来定义聚类的特征。具体而言,将由任意的活体传感器、摄像装置、录音装置、接触装置、机器人中的任意一方或它们的任意组合等构成的环境识别装置70设置于对象空间S。进而,如图12所示,第1聚类分类装置50的计算机还作为反应取得部55发挥功能,该反应取得部55取得表示存在于对象空间S的用户5的反应的反应信息。此外,第1聚类分类装置50的计算机还作为解析部56发挥功能,该解析部56根据由反应取得部55取得的反应信息进行用户5的表情分析等。还作为处理部的一部分发挥功能的设定部53根据解析部56的解析结果,例如在笑脸的图像量超过规定量的情况下,表征与此时的环境条件对应的聚类是“快乐的环境”。然后,设定部53将聚类的特征和环境条件关联起来存储于存储部54中。另外,环境识别装置70不需要固定于对象空间S,也可以是健身追踪器等佩戴于用户5的装置。
另外,控制装置20X也可以与图6所示的控制装置20同样地设置反应取得部26,根据基于由反应取得部26取得的反应信息的解析结果对环境条件进行变更,或者对环境条件的优先级进行变更。另一方面,上述的从第1聚类分类装置50的反应取得部55取得的反应信息的解析结果被用于聚类的表征。
此外,在上述步骤X3中,在设定者定义聚类的特征时,也可以受理用户5进行的文本的输入。该情况下,设定部53通过规定的算法进行文本解析,根据文本确定用户5接受的印象。然后,设定部53将该确定的印象设定为聚类的特征。
此外,在上述步骤X3中,在设定者定义聚类的特征时,还可以反映对象空间S的属性来定义聚类的特征。例如,在对象空间S的用途预先能够识别为会议室、餐厅、安养院等的情况下,这些用途的信息反映到聚类的特征中。总之,作为聚类的特征,能够设定为“快乐的会议室的环境”等。此外,也可以通过光滑感(Tsurutsuru)、粗糙感(Zarazara)、柔软感(Fuwafuwa)等与触觉有关的拟声词/拟态词的表达来设定聚类的特征。此外,在设定者定义聚类的特征时,也可以使用应用了后述的触觉选择装置80的环境识别装置70输入触觉,并将输入的触觉转换为语言标签来设定聚类的特征。
(2-2)第2聚类分类装置
(2-2-1)第2聚类分类装置的动作
接着,进行第2聚类分类装置60的说明。作为前提,假设通过控制装置20Y对环境生成装置10进行控制,在对象空间S生成规定的环境。另外,控制装置20Y具有与上述控制装置20相同的功能,但是,不同之处在于输入部22Y能够输入规定的环境条件。为了便于说明,对控制装置20Y中的与控制装置20不同的结构标注后缀Y。
图13是用于说明第2聚类分类装置60的结构的示意图。第2聚类分类装置60能够由任意的计算机实现,具有环境条件取得部61、分类部62和存储部64。这里,通过在计算机的CPU、GPU等中读入存储装置(ROM、RAM等)中存储的程序,实现上述各功能。但是不限于此,第2聚类分类装置60也可以使用LSI(Large Scale Integration)、ASIC(ApplicationSpecific Integrated Circuit)、FPGA(Field-Programmable Gate Array)等而作为硬件来实现。
另外,第2聚类分类装置60和控制装置20Y也可以不是分别独立的装置,而是一体地组入同一装置中。
环境条件取得部61取得用于在对象空间S生成预先定义了概念的已定义环境的环境条件。作为“已定义环境”,举出“快乐的环境”、“能够集中的环境”、“具有开放感的环境”、光滑感(Tsurutsuru)、粗糙感(Zarazara)、柔软感(Fuwafuwa)等与触觉有关的拟声词/拟态词等。“已定义环境”也可以通过触觉来定义。该情况下,对用户提示能够在物理上感觉到的“具有光滑面的部件”或“具有粗糙面的部件”作为已定义环境的概念。
环境条件取得部61从上述的控制装置20的输入部22Y取得环境条件。这里,对用户提示已定义环境的概念,进而,指示用户输入实现该已定义环境这样的环境条件。接受该指示,用户操作终端装置30,经由输入部22Y输入环境条件,对环境生成装置10进行控制,尝试在对象空间S生成已定义环境。此时,环境条件取得部61适当地取得通过上述终端装置30的操作而输入的环境条件。
分类部62与已定义环境的概念对应地将环境条件分类为规定的聚类。例如,将对多个用户指示生成“快乐的环境”作为已定义环境时的、各用户经由输入部22Y输入的环境条件的集合或包含环境条件的区域分类为同一聚类。另外,分类部62按照规定的算法排除异常值。
存储部64将已定义环境的概念和环境条件关联起来进行存储。这里,已定义环境的概念作为聚类的特征来处理。因此,存储部64将聚类的特征和环境条件关联起来进行存储。通过将该存储部64中存储的信息写入任意的存储装置,能够构建上述环境生成系统1中的控制装置20的存储部21。
此外,如后所述,第2聚类分类装置60也可以作为包含上述存储装置的功能的环境条件存储装置发挥功能。
(2-2-2)第2聚类分类装置的动作
图14是用于说明第2聚类分类装置60的动作的流程图。
首先,对多个用户提示已定义环境的概念(Y1),指示实现该环境这样的环境条件的输入。然后,环境生成装置10和控制装置20Y在规定期间被各用户使用。这里,各用户经由控制装置20Y,以与已定义环境的概念一致的方式使用终端装置30来变更环境条件,尝试使用环境生成装置10在对象空间S生成已定义环境(Y2)。
接着,进行使用环境生成装置10的期间所使用的环境条件的解析。具体而言,分类部62按照规定的算法排除异常值,按照每个已定义环境的概念对由多个用户设定的多个环境条件进行聚类(Y3)。
然后,分类部62将已定义环境视为聚类的特征,将聚类的特征和环境条件关联起来。由此,构建将聚类的特征和环境条件关联起来的数据库并将其存储在存储部64中(Y4)。
如上所述,第2聚类分类装置60具有环境条件取得部61、分类部62和存储部64。环境条件取得部61取得用于在对象空间S生成预先定义了概念的已定义环境的环境条件。分类部62根据已定义环境的概念将环境条件分类为规定的聚类。存储部64将已定义环境的概念和环境条件关联起来进行存储。总之,在第2聚类分类装置60中,与已定义环境相关联地对环境条件进行聚类。而且,由于具有上述结构,因此,在第2聚类分类装置60中,在事前定义了聚类的特征的状况下,能够收集多个环境条件来进行聚类。而且,能够基于此构建将聚类的特征和环境条件关联起来的数据库。
(2-2-3)变形例
在上述步骤Y3中,通过组合第1聚类分类装置50,能够设定在已定义环境中进一步增加了规定的维度的特征而得到的定义。具体而言,第1聚类分类装置50的分类部52将第2聚类分类装置60的分类部62聚类得到的属于已定义环境的概念的多个环境条件分类为新的多个聚类。然后,第1聚类分类装置50的设定部53对这些聚类设定新的聚类的特征。由此,例如,已定义环境是“快乐的环境”,能够将分类为该“快乐的环境”的多个环境条件分类为“提升感高的环境”“幸福感高的环境”等新的聚类。
换言之,通过将第1聚类分类装置50组合于第2聚类分类装置60,在提示了模糊地定义的环境(“快乐的环境”等)后,能够收集与更细致地定义的环境(“提升感高的环境”“幸福感高的环境”等)对应的环境信息。进而,能够基于此构建将聚类的特征和环境条件关联起来的数据库。
此外,在上述步骤X3中,不仅是已定义环境的概念,还能够反映存在于对象空间S的用户5的反应来定义聚类的特征。具体而言,将由任意的活体传感器、摄像装置、录音装置、接触装置、机器人中的任意一方或它们的任意组合等构成的环境识别装置70设置于对象空间S。而且,如图15所示,第2聚类分类装置60的计算机还作为反应取得部65发挥功能,该反应取得部65取得表示存在于对象空间S的用户5的反应的反应信息。此外,第2聚类分类装置60的计算机还作为解析部66发挥功能,该解析部66根据由反应取得部65取得的反应信息进行用户5的表情分析等。处理部68根据解析部66的解析结果,在已定义环境的概念是“快乐的环境”、且笑脸的图像量超过了规定量的情况下,表征与此时的环境条件对应的聚类是对“快乐的环境”进行精细分类得到的“幸福感高的环境”。然后,处理部68将聚类的特征和环境条件关联起来存储于存储部64中。另外,环境识别装置70不需要固定于对象空间S,也可以是健身追踪器等佩戴于用户5的装置。
另外,控制装置20Y也可以与图6所示的控制装置20同样地设置反应取得部26,根据基于由反应取得部26取得的反应信息的解析结果对环境条件进行变更,或者对环境条件的优先级进行变更。另一方面,上述的从第2聚类分类装置60的反应取得部65取得的反应信息的解析结果被用于聚类的表征(再分类等)。
(3)触觉选择装置
(3-1)结构
作为环境识别装置70、操作装置85或环境条件存储装置50、60的一部分或全部,可以使用以下的触觉选择装置80。
如图16所示,触觉选择装置80具有提供部81和识别部82。提供部81具有多个接触部81a、81b、81c、81d、81e、81f…。具体而言,如图17所示,触觉选择装置80具有长方体形状的外壳80c,在各面具有多个接触部81a、81b、81c、81d、81e、81f…。另外,图17是用于说明触觉选择装置80的外观的一例的示意图。
提供部81在用户5接触时,单独提供不同的触觉。作为不同的触觉的例子,举出光滑感(Tsurutsuru感)、粗糙感(Zarazara感)、柔软感(Fuwafuwa感)等。这些触觉例如能够通过配置蛇皮、草垫、羽毛等来实现。总之,提供部81中的至少2个接触部由不同的材料构成。
在图17所示的例子中,在第1面F1、第2面F2、第3面F3分别设置有产生2种不同的触觉的接触部81a、81b、81c、81d、81e、81f。这里,针对规定的感觉的评价轴按照每个面来决定,在配置于同一面的2个接触部中,强弱不同。例如,在第1面F1中,实现粗糙感,右侧的接触部81a的粗糙感强,左侧的接触部81b的粗糙感弱。此外,在第2面F2中,实现光滑感,右侧的接触部81c的光滑感强,左侧的接触部81d的光滑感弱。此外,在第3面F3中,实现柔软感,近前侧的接触部81e的柔软感强,里侧的接触部81f的柔软感弱。
如图18所示,触觉选择装置80具有上述的提供部81和识别部82。识别部82由任意的处理器和存储器构成。
识别部82识别用户5选择的触觉。识别部82根据用户5接触的接触部,识别用户5的触觉。由此,能够识别与用户5所在的对象空间S的环境的状态相当的触觉。若进行补充,则在表达个人的感觉时,与利用语言进行表达相比,通过触觉的选择进行表达有时准确地反映个人内在具有的感官取向(针对感觉的意向的个人差异)。例如,即使用户5根据周围的环境被唤起“温暖”感情,有时本人也不能感觉到该“温暖”感情是类似于触摸毛毯时感觉到的“温暖”感情,还是类似于触摸热水时感觉到的“温暖”感情,利用语言,有时只能表达为“温暖”。这种情况下,通过多个触觉的选择来表达“温暖”感情时,有时能够准确地表达本人的感情。
通过实施以下的实验,具体地验证了与利用语言进行表达相比,通过触觉的选择进行表达能够在环境生成中反映个人内在具有的感官取向。
(3-2)基于触觉的选择的环境生成评价实验
在生成环境的系统中,在用户选择环境时,与语言(感情词:例如“放松”)相比,触觉(例如接触“毛茸茸的(Mokomoko)”的素材)能够反映很难利用语言表达的自身的状态,因此,建立能够实现用户期望的环境这样的假设。为了验证本假设,使用用于将被输入的语言和环境对应起来的选择装置(以下为语言选择装置)、以及用于将触觉和环境对应起来的选择装置(以下为触觉选择装置)进行了评价实验。
(3-2-1)实验的方法
参加者是17名男女学生(男性10名、女性7名)。在能够向房间的4面墙壁投影影像的实验室进行了实验。参加者参加了使用语言选择装置的条件和使用触觉选择装置的条件这两个条件。使用语言选择装置和触觉选择装置的顺序在参加者之间取得平衡。对参加者给出如下教示:“能够通过按下按钮(感情词或触觉)来改变空间(房间)的影像。每当按下按钮时,影像变化。影像按照按下的按钮(感情词或触觉)(例如“放松”(感情词)或毛茸茸的触觉)来投影。对选择装置进行操作,在成为您满意的空间(房间)后,请按下决定按钮后退出”。参加者在成为两个条件自己都满意的空间(房间)的时点,停止按下按钮(感情词或触觉),从实验室退出。
语言选择装置使用附带显示有“紧张”、“放松”、“快活”这样的感情词的按钮的装置。
触觉选择装置使用附带用户感觉到多个触觉的素材作为按钮的装置。素材使用低回弹聚氨酯(提供毛茸茸的触觉)、纸张(提供丝般(Sarasara)的触觉)、砾石(提供砂砾(Gotsugotsu)般的触觉)。另外,选择这3种素材作为触觉选择装置的理由在后面叙述。
向参加者提示的影像是使用统计性生成模型生成的。使用通过事前调查而确认了在参加者选择出的感情词(例如放松)/触觉与向空间(房间)提示的影像的印象(例如“感到放松”)之间存在对应关系的规定的影像。另外,针对相同的语言选择装置或相同的触觉选择装置的操作,也根据与参加者选择出的触觉或感情词对应的生成模型,每次生成/提示不同的影像。
另外,实验中生成/提示的影像使用通过聚类等方法而与感情词和触觉相关联的影像。该关联的验证在后面叙述。
(3-2-2)评价指标
在刚刚使用语言选择装置之后和刚刚使用触觉选择装置之后,向参加者询问“想要成为什么样的空间”这样的控制目标。在控制目标中设定能够放松的房间、露出哀愁的房间、心情快活的房间、具有紧张感的房间、兴奋的房间、感觉到敬畏的房间、其它(自由描述、例如“冷漠的房间”)的多个项目,使参加者从其中选择1个回答。
在使用语言选择装置和触觉选择装置后,关于哪个选择装置“能够使房间成为期望的氛围”、“操作是快乐的”,使参加者选择语言选择装置和触觉选择装置中的任意一方。进而,使参加者以自由描述的方式回答使用各个选择装置后的感想。
(3-2-3)实验结果
图21和图22是验证基于触觉的环境生成的效果的实验结果的曲线图。图21示出参加者针对“想要成为什么样的空间”这样的控制目标的回答结果。根据图21所示的结果可知,与语言选择装置相比,使用触觉选择装置时,参加者的控制目标变得多样。
图22是示出与哪个选择装置“能够使房间成为期望的氛围”、“操作是快乐的”有关的参加者的回答的曲线图。如图22所示,示出与语言选择装置相比,使用触觉选择装置时,参加者能够使空间(房间)成为期望的氛围(p<.05)、且选择装置的操作是快乐的(p<.01)。此外,作为使用了各个选择装置的参加者的感想,存在“触觉选择装置让我更容易想象氛围。在语言选择装置中,有些颜色和动作与我的语言形像不符”、“触觉选择装置不会被语言影响,结合心情进行选择”、“认为语言选择装置存在与感情稍微不同的空间。感觉触觉选择装置与房间的空间相符”、“感受到语言选择装置很难接近自己想象的感情的房间的印象”等。根据以上的数据示出,与使用语言选择装置时相比,在使用触觉选择装置时,能够实现接近参加者期望的想像的空间(房间)。
根据以上的验证示出,在表达个人针对环境感受到的感觉时,与利用语言进行表达相比,通过触觉的选择进行表达更加准确地反映用户内在具有的感官取向。
(3-2-4)实验中使用的触觉选择装置和语言选择装置的说明
在制作触觉选择装置和语言选择装置之前,预先进行事前准备。在事前准备中,使参加者以6种触觉素材为主题来制作与其对应的影像。然后,从多人收集影像,根据这些影像的特征量进行聚类分类,生成影像,由此准备在空间实现6种触觉素材的影像(将该影像称为触觉聚类影像)。
使用在事前准备中制作的6种触觉聚类影像,进行用于制作触觉选择装置和语言选择装置的实验。与事前准备不同的参加者参与该实验。首先,以10秒的时间在房间的4个面提示6种触觉聚类影像中的任意一种,教示参加者观看该触觉聚类影像。在10秒后,教示参加者从位于眼前的6种触觉(提供“绒毛(Mofumofu)”、“毛茸茸”、“砂砾”、“粗糙”、“丝般”、“光滑(Surusuru)”的触觉的素材)中,“选择一个适合于表示该空间(房间)的触觉”,参加者选择一个适合于被投影了影像的空间的触觉。在提供触觉时,触觉素材以放入盒子中以使参加者无法看到的状态提供给参加者。
然后,教示参加者“选择一个适合于表示该空间(房间)的词语”。参加者从“兴奋”、“快活”、“放松”、“悲伤”、“紧张”、“敬畏”的语言(感情词)中选择最适合的语言。
图23和图24示出表示用户对6种触觉聚类影像的评价结果的矩阵。
图23示出表示向参加者提示的6种触觉聚类影像(在图23中对应于纵轴)与参加者评价为适合于该空间(房间)的触觉(在图23中对应于横轴)的相关性的矩阵。颜色越深(数值越大),则表示向参加者提示的触觉聚类影像与参加者评价为适合的触觉的关联性越强(相关性越高)。
图24示出表示向参加者提示的6种触觉聚类影像(在图24中对应于纵轴)与参加者评价为适合于该空间(房间)的感情词(在图24中对应于横轴)的相关性的矩阵。颜色越深(数值越大),则表示向参加者提示的触觉聚类影像与参加者评价为适合的感情词的关联性越强(相关性越高)。
由此,将相对于触觉聚类影像的相关性高的触觉(触觉素材)和感情词关联起来,由此准备触觉选择装置和语言选择装置。
例如,触觉素材中的“砂砾”与触觉聚类影像中的“GotsuGotsu”的相关性高,因此,在触觉选择装置的情况下,在选择与“砂砾”对应的素材时,在空间再现触觉聚类影像“GotsuGotsu”。
例如,感情词中的“紧张”与触觉聚类影像中的“GotsuGotsu”的相关性高,因此,在语言选择装置的情况下,在选择“紧张”这样的感情词时,在空间再现触觉聚类影像“GotsuGotsu”。
(3-3)动作
在用户5接触触觉选择装置80的接触部81a、81b、81c、81d、81e、81f…中的任意一方时,识别部82检测该接触,识别选择出的触觉。在本实施方式的识别部82中,例如,根据对象空间S内的用户5对接触部的接触次数和/或接触时间等,对用户5针对哪个接触部81a、81b、81c、81d、81e、81f…如何接触进行解析,由此识别与对象空间S的环境的状态相当的触觉,从而取得表示触觉的信息(触觉信息)。
(3-4)应用
能够利用识别部82对触觉的解析结果来构建图18所示的操作装置85。操作装置85除了具有触觉选择装置80以外,还具有由任意的处理器和存储器构成的处理部83以及任意的通信接口即通信部84。根据用户5对多个接触部81的接触情况和其它信息决定的触觉信息经由任意的通信部84发送到其它装置。操作装置85和能够与操作装置85连接的其它装置作为环境生成系统1的一部分进行动作。
能够与操作装置85连接的其它装置例如是环境生成装置10(图1、图5),操作装置85也可以作为环境生成装置10的操作装置发挥功能。该情况下,操作装置85的处理部83决定与由识别部82识别出的触觉对应的环境条件。具体而言,处理部83也可以根据与预先存储的触觉信息相关联的环境条件(例如与后述的环境条件存储装置同样地存储的信息),决定与由识别部82识别出的触觉对应的环境条件。所决定的环境条件经由通信部84发送到环境生成装置10,对环境生成装置10进行控制。由此,根据被输入的触觉在对象空间S生成规定的环境。
另外,环境生成装置10也可以具有上述处理部83的功能。该情况下,操作装置85向环境生成装置10发送触觉信息,通过环境生成装置10决定与触觉对应的环境条件。
能够与操作装置85连接的其它装置是控制装置20、20X、20Y(图6、图9、图12、图13、图15),操作装置85也可以向控制装置20、20X、20Y发送触觉信息。
触觉选择装置80也可以作为环境识别装置的一部分或全部发挥功能。将由识别部82识别出的触觉的解析结果和环境条件关联起来,由此,能够根据用户选择出的触觉来决定对象空间S的环境的状态。该情况下,触觉选择装置80包含由任意的处理器和存储器构成的处理部83(图18)。处理部83决定与由识别部82识别出的触觉相关联的环境条件。由此,能够决定与由用户输入的触觉对应的对象空间S的环境的状态。所决定的环境条件例如作为反应信息而经由任意的通信接口输出到第1聚类分类装置50(图9、图12)和第2聚类分类装置60(图13、图15)。
触觉选择装置80中的识别部82也可以与上述第1聚类分类装置50或第2聚类分类装置60的存储部54、64的功能组合,作为环境条件存储装置进行动作。
具体而言,环境条件存储装置例如具有:取得包含温度、湿度、风、图像、影像、声音中的至少一方的环境条件的环境条件取得部51或61;取得表示触觉的信息即触觉信息的触觉信息取得部(识别部82);以及将触觉信息和环境条件关联起来进行存储的存储部54或64。进一步地,环境条件存储装置也可以还具有提供多个触觉的提供部81。
与上述的例子同样,环境条件存储装置中存储的环境条件例如属于根据触觉信息被赋予特征的一个或多个聚类。例如使多个用户制作与触觉信息对应的多个环境条件等并进行收集,进行聚类,由此生成聚类。通过聚类,生成将触觉信息和环境条件关联起来的信息。这些信息作为数据库蓄积在存储装置中。在用户选择了规定的触觉时,参照该数据库,选择与选择出的触觉对应的聚类中包含的1个环境条件作为控制目标。为了使触觉信息和环境条件对应起来,预先决定与数据库上的触觉信息对应的标签。例如,在毛茸茸的触觉的情况下,可以是“毛茸茸的”、“柔软感”这样的语言标签,也可以是数字或记号等与其它聚类进行区分的任意标签。如上述的例子那样,聚类中的环境条件的选择方法可以随机地指定,也可以根据规定的优先级进行选择或变更。
(3-5)特征
根据触觉选择装置80,能够根据用户接触的接触部来识别触觉,根据识别出的触觉生成环境。进而,通过使用这种触觉选择装置80作为环境识别装置70、操作装置85或环境条件存储装置的一部分或全部,能够根据触觉的差异来识别对象空间S的环境的状态。此外,触觉选择装置80利用不同的材料构成接触部,由此,能够根据基于材料的触觉的差异来识别对象空间S的环境的状态。
(3-6)其它触觉信息和环境条件的关联
在上述的例子中,利用聚类将触觉信息和环境条件关联起来,但是不限于此。例如,也可以使用以下这种方法。
例如,用户决定与触觉信息对应的多个环境条件等并预先进行设定,作为数据库存储在存储装置中。在用户选择了规定的触觉的情况下,参照数据库,将与该规定的触觉对应的多个环境条件的平均值设为控制目标。该情况下,也可以代替平均值,而将统计上最多存在的环境条件设为控制目标。
或者,存储装置也可以保持包含预先设定的与触觉信息对应的多个环境条件的表。在用户选择了规定的触觉的情况下,参照表,选择与该规定的触觉相关联的1个环境条件作为控制目标。
触觉信息和环境条件也可以一对一地关联起来。
(3-7)接触部的变形例
触觉选择装置80的接触部81也可以通过以下的结构来实现。
例如,通过使至少2个接触部的接触面产生不同的振动,使用户根据基于振动的触觉的差异来选择触觉。例如,如果是具有将电压转换为力的压电元件的接触部,则能够使接触面产生振动。由此,能够进行对象空间S的环境的状态的识别或环境的生成。
通过使至少2个接触部的接触面产生不同的温度和/或湿度,使用户根据基于温度和/或湿度的触觉的差异来选择触觉。例如,如果是具有帕尔帖元件的接触部,则能够改变接触面的温度。由此,能够进行对象空间S的环境的状态的识别或环境的生成。
通过使至少2个接触部的接触面产生不同的电压和/或电流,使用户根据基于电压和/或电流的触觉的差异来选择触觉。例如,能够采用具有施加电压的电极的接触部。由此,能够进行对象空间S的环境的状态的识别或环境的生成。
通过使至少2个接触部的接触面产生不同的磁力,使用户根据基于磁力的触觉的差异来选择触觉。例如,至少2个接触部也可以通过进入部件的磁粉进行运动等而使接触面产生不同的磁力。或者,能够采用具有刚性根据外部磁场而变化的磁性弹性体或磁场生成装置的接触部。另外,接触部81也可以具有上述结构的任意组合。由此,能够进行对象空间S的环境的状态的识别或环境的生成。
此外,上述例子的接触部也可以是一个。例如,也可以在单一的接触部的接触面中,对温度和/或湿度、电压和/或电流或磁力进行变更,由此,用户能够选择接近自身的感觉的触觉。
(4)输入辅助装置(环境生成装置的控制)
如果存在用户创建自我环境来表达“现在有接受这种环境的心情”这样的手段,则能够生成更加接近用户的感觉的环境。因此,需要如下设计:将用户创建的环境始终保持在利用网络共享的数据库中,用于获得新的生成模型。但是,要求专业性低的一般用户从头开始创建复杂的环境的系统是不现实的。因此,在设定了公共环境协议后,作为生成环境的手段,考虑如下手段。例如,考虑能够非常缜密地生成环境的正规的计算机上的生成器应用、以孩子和老人也能够操作的方式在触摸面板上以GUI进行简化的手段、能够通过更加直观地接触而无意识地生成环境的触觉选择装置等广泛的种类。通过准备这些生成环境的手段,能够将用户参与创造活动的障碍降低到极限。而且,通过构建多种用户经由网络共享生成模型组的生态系统,尝试持续地增加生成模型。理想情况下,优选如下形式:在用户没有意识到进行自我创作活动的状态下,实际上由用户在生态系统中生成新的环境,将其机械地收集并存储在数据库中。这样,接触不认识的他人生成的新类型的环境,由此,激发用户中潜在的创造性。如果能够构建在这里发生产生新的创造种子这样的巧妙联系的开放性高的生态系统,则能够持续地获得新的生成模型。
基于上述内容,对具有在上述终端装置30中在控制装置20X、20Y输入环境条件时能够直观操作的界面的输入辅助装置的例子进行说明。另外,输入辅助装置可以通过在终端装置30安装程序来实现。以下示出能够直观操作的界面的例子。
(4-1)第1例
作为第1例,输入辅助装置构成为,经由构成环境生成装置10的投影仪,能够决定用于在对象空间S的壁面移动规定的显示物的环境条件。例如,通过用户5对终端装置30的操作,环境生成装置10在对象空间S的壁面显示显示物R(参照图1、5)。这里,构成为在终端装置30安装有输入辅助装置的功能,受理用于对显示物R的点的数量、移动方向、移动速度、大小、色彩、形状、点的配置、周期运动等进行调整的调整信息。因此,用户5通过在终端装置(输入辅助装置)30输入上述调整信息,能够对对象空间S的壁面中显示的显示物R的显示方式进行变更。
另外,认为与下方向相比,显示物R越向上方向移动,则给人越积极的印象。此外,认为与左方向相比,显示物R越向右方向移动,则给人越积极的印象。
终端装置30也可以包含触觉选择装置80。该情况下,如上所述,能够根据用户5对触觉选择装置80的多个接触部81的接触情况,对环境条件的参数进行变更。接触情况例如包含用户5触摸了接触部81的哪个面、触摸面时的触摸方式的强弱、触摸的面的方向、触摸的频度等。根据这些接触情况对环境条件的参数进行变更,能够对显示物R的点的数量、移动方向、大小、色彩、形状、点的配置、周期运动等进行变更。
(4-2)第2例
(4-2-1)画面界面
作为第2例,输入辅助装置构成为能够在画面上移动规定的显示物,对应于该显示物的移动来决定环境条件。此外,构成为能够以所决定的环境条件对环境生成装置10进行控制。
例如,输入辅助装置采用图19所示的结构的界面。这里,在输入辅助装置的画面的右侧的区域G1显示圆显示物Z1。进而,在该界面中,当用户5在图19所示的画面的左侧的区域G2中利用鼠标或触摸屏幕等描绘曲线Z2时,与该曲线Z2对应地,右侧的区域G1中显示的圆显示物Z1以一个自由度上下移动规定时间。另外,图19所示的左侧的区域G2的纵轴示出上下运动,横轴示出时间。此外,通过变更下部的滚动条G3的长度,能够随时变更圆显示物Z1移动的时间。如果是这种界面,则谁都能直观地创造各种移动。其结果是,通过使用利用这种界面的输入辅助装置,能够进行反映了群体中共享的感觉的环境条件的提取和生成。
(4-2-2)实验例
关于输入辅助装置进行的环境条件的分类,使用实验例进行补充。
在本实验中,指示53名成人参加者分别以如下方式生成曲线:没有任何先入为主的概念,以自由发挥的方式,使用输入辅助装置,利用曲线表达“P1:幸福的生物的移动”、“P2:悲伤的生物的移动”、“P3:放松的生物的移动”、“P4:紧张的生物的移动”、“P5:非生物的移动”这5种移动。
然后,将各参加者对5种移动进行成像而生成的曲线视为波形,分别单独地执行傅里叶变换。在按照各个移动的种类求出53名参加者的功率谱的平均时,得到图20所示的结果。根据该结果可知,虽然各人完全自由地、没有先入为主地、与规定的图像对应地设计了移动,但是,按照移动的种类,在功率谱上观测到参加者间共通的特征。这揭示了在大量参加者进行直观设计的过程中,能够提取个人间共享的感官取向。
因此,通过利用上述这种使用直观界面的输入辅助装置,容易设定用于生成反映了个人间共享的感官取向的环境的环境条件的聚类。
<其它实施方式>
以上说明了实施方式,但是,能够理解到可以在不脱离权利要求书的主旨和范围的情况下进行方式和详细情况的多种变更。
本发明不限于上述各实施方式。本发明能够在实施阶段在不脱离其主旨的范围内对结构要素进行变形而具体化。此外,本发明通过上述各实施方式所公开的多个结构要素的适当组合,能够形成各种发明。例如,也可以从实施方式所示的全部结构要素中删除若干个结构要素。进而,也可以在不同实施方式中适当组合结构要素。
标号说明
1:环境生成系统;5:用户;10:环境生成装置;20、20X、20Y:控制装置;21:存储部;22、22X、22Y:输入部;23:处理部;24:控制部;25:输出部;26:反应取得部;28:解析部;30:终端装置;50:第1聚类分类装置;51:环境条件取得部;52:分类部;53:设定部;54:存储部;55:反应取得部;56:解析部;60:第2聚类分类装置;61:环境条件取得部;62:分类部;64:存储部;65:反应取得部;66:解析部;68:处理部;70:环境识别装置;80:触觉选择装置;80c:外壳;81:提供部;81a、81b、81c、81d、81e、81f:接触部;82:识别部(触觉信息取得部);83:处理部;84:通信部;85:操作装置。
现有技术文献
专利文献
专利文献1:日本特开2003-299013号公报。
- 环境条件存储装置、环境条件存储方法、操作装置和环境识别装置
- 控制受污染的用于操作的洁净房间室内环境条件的方法