一种落叶检测预测框损失函数计算方法
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及目标检测技术领域,具体涉及一种落叶检测预测框损失函数计算方法。
背景技术
目前,随着计算机视觉技术的发展,目标检测成为当前的研究热点,在环卫领域有着广泛的应用前景。路面的落叶清理是环卫工作的难点,尤其是园区和狭窄道路的落叶只能由人工清理,费时费力,因而,利用目标检测技术实现路面落叶的智能清理成为新的途径。
落叶检测的需求与一般的目标检测不同。单片落叶与成片落叶分布不均匀,对于成片落叶的清扫,只需检测落叶的成片区域即可。现有的目标检测算法可以很好的完成单片落叶的检测任务,但是检测成片落叶的结果很不理想,原因主要在于现有算法的预测框损失函数只注重于单片落叶损失的计算,没有考虑到成片落叶的复杂情况。所以,区分单片、成片落叶的高效目标检测算法成为迫切需求。
发明内容
本发明提出了一种新的预测框损失函数—AIoULoss(引力损失函数)用以解决成片落叶的检测问题。
本发明可通过以下技术方案实现:
一种适用于落叶检测的预测框损失函数计算方法,包括以下步骤:
步骤1:首先计算出已标定数据集的目标框中心点之间的欧式距离,求出其平均值l
步骤2:假设共有N个预测框,下面开始计算N个预测框两两之间的距离。引入参数l
步骤3:当l
步骤4:使用l
步骤5:按照新预测框计算IoU损失L
其中,B'表示融合之后的预测框,G表示真实框,S
同时,计算原预测框与真实框的重合面积之比:
其中,S
如果L
如果L
其中,B'和G分别代表新预测框和真实框,C为预测框和真实框的最小外接矩形。
步骤6:剩余预测框数量为N-1,返回步骤2,再次进行距离计算,进行下一次迭代。
步骤7:放弃对当前预测框的融合处理,转入步骤3,进行l
步骤8:融合过程结束,判定为单片落叶时,进入单片落叶处理过程,其预测框损失函数如下所示:
其中,IoU为预测框和真实框的IoU损失,ρ为预测框和真实框中心点之间的欧氏距离,B和G分别代表预测框和真实框,c为预测框和真实框的最小外接矩阵的对角线长度。
步骤9:为了同时实现单片落叶与成片落叶的损失函数计算,定义AIoULoss函数如下:
L
其中,L
步骤10:根据实验的验证效果与实际应用场景,对δ进行微调。如果落叶清扫单位覆盖面积大,可以增大δ,获得更大的成片落叶面积,提高清扫效率;如果落叶清扫单位覆盖面积较小,可以减小δ,取得更好的清扫效果。
本发明技术思路为独创,与现有的技术相比,可以有效解决落叶检测过程中单片与成片落叶难以区分的问题。
附图说明
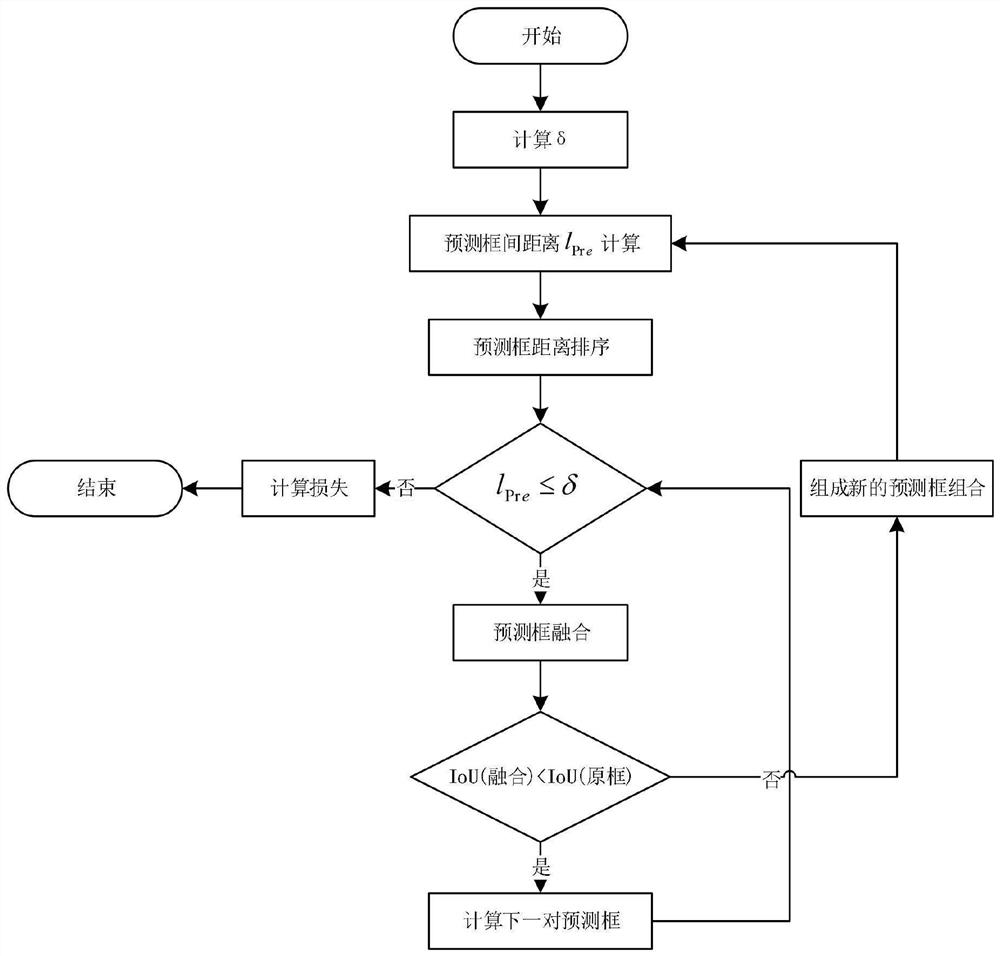
图1为本发明的算法流程图。
具体实施方式
本发明提出了一种新的预测框损失函数—AIoULoss(引力损失函数)用以解决成片落叶的检测问题,下面对本发明做进一步说明。
本发明可通过以下技术方案实现:
一种适用于落叶检测的预测框损失函数计算方法,包括以下步骤:
步骤1:首先计算出已标定数据集的目标框中心点之间的欧式距离,求出其平均值l
步骤2:假设共有N个预测框,下面开始计算N个预测框两两之间的距离。引入参数l
步骤3:当l
步骤4:使用l
步骤5:按照新预测框计算IoU损失L
其中,B'表示融合之后的预测框,G表示真实框,S
同时,计算原预测框与真实框的重合面积之比:
其中,S
如果L
如果L
其中,B'和G分别代表新预测框和真实框,C为预测框和真实框的最小外接矩形。
步骤6:剩余预测框数量为N-1,返回步骤2,再次进行距离计算,进行下一次迭代。
步骤7:放弃对当前预测框的融合处理,转入步骤3,进行l
步骤8:融合过程结束,判定为单片落叶时,进入单片落叶处理过程,其预测框损失函数如下所示:
其中,IoU为预测框和真实框的IoU损失,ρ为预测框和真实框中心点之间的欧氏距离,B和G分别代表预测框和真实框,c为预测框和真实框的最小外接矩阵的对角线长度。
步骤9:为了同时实现单片落叶与成片落叶的损失函数计算,定义AIoULoss函数如下:
L
其中,L
步骤10:根据实验的验证效果与实际应用场景,对δ进行微调。如果落叶清扫单位覆盖面积大,可以增大δ,获得更大的成片落叶面积,提高清扫效率;如果落叶清扫单位覆盖面积较小,可以减小δ,取得更好的清扫效果。
- 一种落叶检测预测框损失函数计算方法
- 一种车辆检测训练中二级损失函数的计算方法