转向装置
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及搭载于车辆且对该车辆所具有的1个车轮进行转向的转向装置。
背景技术
在转向装置中,例如,将车轮向与转向操作构件的操作位置对应的转向位置转向,在转向操作构件处于直行状态位置(是使车辆直行时的操作位置,也能够称作中立位置)时,车轮也位于直行状态位置(是在车辆直行时应该位于的转向位置,也能够称作中立位置)。在下述专利文献中,基于通过利用相机同时拍摄左右1对车轮而得到的图像数据来算出这1对车轮的转向中的对称度,基于该对称度来进行由传感器检测的转向操作构件的操作位置的修正。
发明内容
最近,正在研究通过电动机产生的力而使1个车轮独立地转向的转向装置(以下,有时称作“单轮独立转向装置”),在该单轮独立转向装置中,由于未设置将分别保持左右的车轮的1对转向节连结的构件,所以在左右的车轮间容易产生转向位置的偏离。另外,在单轮独立转向装置中,为了享受无需设置用于检测转向位置的传感器这一优点,能够基于与车轮的转向位置处于特定的关系的电动机的动作位置来实现与该动作位置对应的车轮的转向。另一方面,在转向装置中,在车辆的工作处于停止的期间,即,在点火开关(以下,有时称作“IG开关”)被设为断开状态的期间,一般从节能的观点出发而切断电力向该转向装置的供给。但是,在基于电动机的动作位置来进行车轮的转向控制的单轮独立转向装置中,在电力向该转向装置的供给被切断的情况下,控制器会丢失电动机的动作位置。在IG开关被设为断开状态的期间向车轮施加外力而车轮被转向的情况下,控制器在IG开关被设为接通状态后无法执行准确的转向控制。考虑这一点,也可考虑如上述专利文献所记载那样,采用通过车轮的拍摄来推定车轮的转向位置且基于该推定来设定电动机的动作位置这一手法。然而,由于基于拍摄的车轮的转向位置的推定的精度比较低,所以即使采用了上述手法,也有可能无法执行充分准确的转向控制。若能够将电动机的动作位置基于充分准确的车轮的转向位置而设定,则单轮独立转向装置的实用性提高。本发明在这样的实情下完成,能够提供实用性高的单轮独立转向装置。
本发明的第一方案的转向装置是将车辆所具备的多个车轮中的1个车轮与其他车轮相独立地转向的转向装置。所述转向装置具备:作为驱动源的电动机;动作变换机构,构成为将所述电动机的动作变换为车轮的转向动作;及控制器,构成为通过控制向所述电动机的供给电流来实现与所述电动机的动作位置对应的车轮的转向。所述控制器构成为,作为对所述电动机的动作位置的基准即基准动作位置进行设定的基准设定处理而进行第一基准设定处理和第二基准设定处理双方,所述第一基准设定处理是基于依据由相机拍摄到的车轮的图像数据而取得的所述车轮的转向位置的处理,所述第二基准设定处理是基于在车辆的行驶中车轮被维持为特定或任意的转向位置时的向电动机的供给电流的处理。
在所述方案中,所述控制器可以构成为,决定与车轮应该转向的转向位置对应的电动机的动作位置即目标动作位置,所述控制器可以构成为,基于实际的所述电动机的动作位置相对于所述目标动作位置的偏差即动作位置偏差来决定向所述电动机的供给电流。
在所述方案中,所述控制器可以构成为,在车辆的行驶中,以对所述电动机供给为了将车轮的转向位置维持为目标转向位置而需要的维持电流的方式控制向所述电动机的供给电流。
在所述方案中,所述控制器可以构成为,在开始了车辆的工作时进行所述第一基准设定处理。
在所述方案中,所述控制器可以构成为,存储车辆的工作停止时的车轮的转向位置,所述控制器可以构成为,基于存储的所述转向位置与在车辆的工作开始时基于车轮的图像数据而取得的转向位置之差来进行所述第一基准设定处理。
在所述所述方案中,所述控制器可以构成为,基于正向所述电动机实际供给的电流与标准电流之差来进行所述第二基准设定处理,所述标准电流与车轮的转向位置及车辆的行驶速度建立了关联。
在所述所述方案中,所述控制器可以构成为,将在车辆的行驶时实际检测到的向所述电动机的供给电流存储为所述标准电流。
在所述所述方案中,所述控制器可以构成为,在车辆正以特定速度直行时进行所述第二基准设定处理。
附图说明
本发明的典型实施例的特征、优点及技术上和工业上的意义将会在下面参照附图来描述,在这些附图中,同样的标号表示同样的要素,其中:
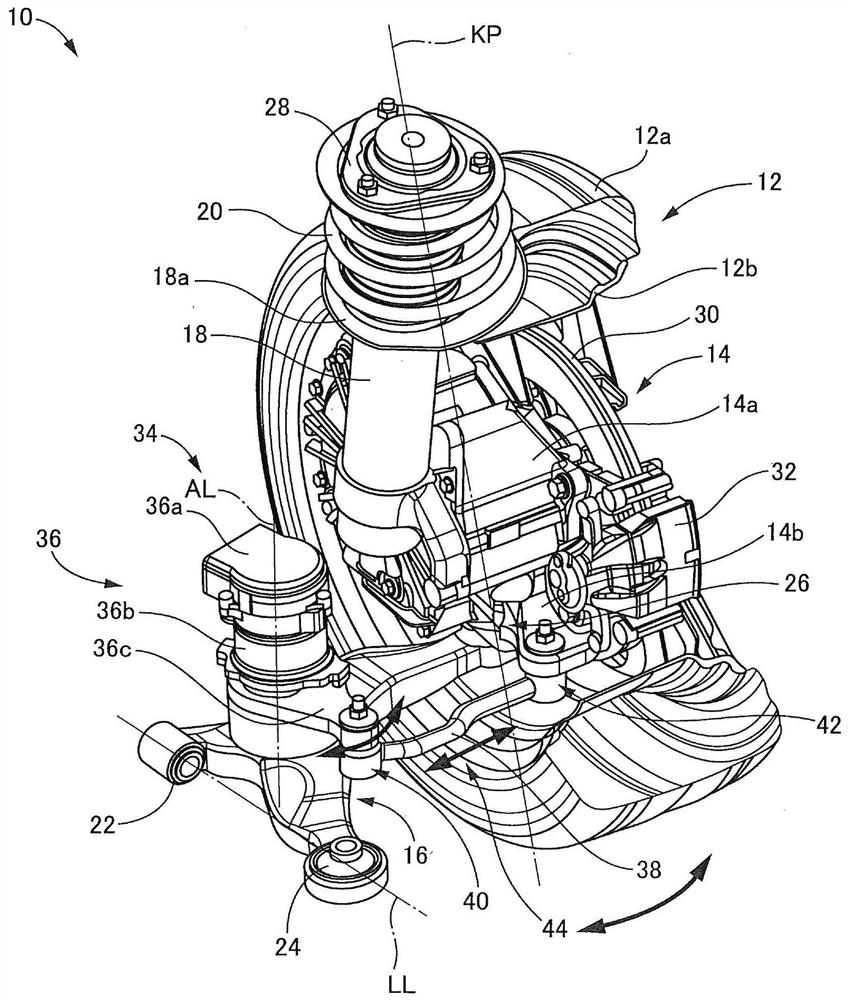
图1是示出构成为包括实施例的转向装置的车辆用车轮配设模块的立体图。
图2A是示出图1所示的车轮配设模块相对于1对前轮的各自搭载的车辆的结构的示意图,图2B是示出能够拍摄前轮的相机配设于车辆的车门后视镜的情形的立体图。
图3A、图3B、图3C是示意性地示出由相机拍摄到的车轮的图像的图。
图4是在实施例的转向装置中执行的转向控制程序的流程图。
图5是在实施例的转向装置中执行的启动处理程序及完结处理程序的流程图。
图6是在实施例的转向装置中执行的转向位置调整程序的流程图。
具体实施方式
以下,作为用于实施本发明的方式,参照图来详细说明作为本发明的实施例的转向装置。需要说明的是,本发明除了下述实施例之外,还能够以所述〔发明的方案〕所记载的方式为首,以基于本领域技术人员的知识实施各种变更、改良后的各种方式来实施。
[A]转向装置的硬件结构
实施例的转向装置并入于图1所示的车辆用车轮配设模块10(以下,有时简称作“模块10”)。模块10是用于将装配有轮胎12a的轮体12b向车身配设的模块。虽然能够将轮体12b自身视为车轮,但在本实施例中,为了方便,将装配有轮胎12a的轮体12b称作车轮12。
本模块10具有作为车轮旋转驱动装置的车轮驱动单元14。车轮驱动单元14具有壳体14a、内置于壳体14a的作为驱动源的电动机及对该电动机的旋转进行减速的减速器(均省略图示)、以及安装轮体12b的轮毂(在图中遮住而看不见)。车轮驱动单元14配置于轮体12b的轮辋的内侧,被称作所谓的轮内电机单元。车轮驱动单元14是周知的构造,因此关于其的这里的说明省略。
本模块10构成为包括麦弗逊型悬架装置(也被称作“麦弗逊柱型”)。在该悬架装置中,车轮驱动单元14的壳体14a作为将车轮以能够旋转的方式保持并且被容许相对于车身的上下移动的轮架发挥功能,进一步说,壳体14a作为后文说明的转向装置中的转向节发挥功能,被容许相对于车身的上下移动。因此,悬架装置构成为包括作为悬架臂的下臂16、车轮驱动单元14的壳体14a、冲击吸收器18及悬架弹簧20。
悬架装置自身是一般的构造,因此,若简单说明,则下臂16是被称作所谓的L臂的形状,基端部在车辆前后方向上分为2个部分,在该基端部处,经由第一套筒22、第二套筒24而以能够绕臂转动轴线LL转动的方式支承于车身的纵梁(省略图示)。下臂16的顶端部经由作为第一接头的臂连结用球窝接头26(以下,有时称作“第一接头26”)而以能够转动的方式连结于车轮驱动单元14的壳体14a的下部。
冲击吸收器18的下端部固定地支承于车轮驱动单元14的壳体14a,上端部经由上支承件28而支承于车身的轮胎罩的上部。悬架弹簧20的上端部也经由上支承件28而支承于车身的轮胎罩的上部,悬架弹簧20的下端部由呈凸缘状地设置于冲击吸收器18的下支承件18a支承。也就是说,悬架弹簧20和冲击吸收器18互相并列地配设于下臂16与车身之间。
本模块10具有制动器装置,该制动器装置构成为包括与轮体12b一起安装于轮毂且与车轮12一起旋转的制动盘30和以跨越该制动盘30的方式保持于车轮驱动单元14的壳体14a的制动钳32。虽然详细的说明省略,但该制动钳32具有作为摩擦构件的制动衬块和具有电动机且用于通过利用该电动机的力将制动衬块向制动盘30压靠而停止车轮12的旋转的制动致动器,该制动器装置被设为依赖于所谓的电动机产生的力而产生制动力的电动制动器装置。
而且,本模块10具有作为本发明的实施例的转向装置34。转向装置34是用于仅将左右1对车轮12中的一方与另一方相独立地转向的单轮独立转向装置,大概构成为包括如先前说明那样作为转向节发挥功能的车轮驱动单元14的壳体14a(以下,在作为转向装置34的构成要素来处理的情况下,有时称作“转向节14a”)、在接近下臂16的基端部的位置处配设于下臂16的转向致动器36及将该转向致动器36与转向节14a连结的拉杆38。
转向致动器36构成为包括作为驱动源的电动机即转向电动机36a、对转向电动机36a的旋转进行减速的减速器36b及通过转向电动机36a的经由减速器36b的旋转而转动且作为转向主动臂发挥功能的致动器臂36c。拉杆38的基端部经由作为第二接头的杆基端部连结用球窝接头40(以下,有时称作“第二接头40”)而连结于致动器臂36c,拉杆38的顶端部经由作为第三接头的杆顶端部球窝接头42(以下,有时称作“第三接头42”)而连结于转向节14a所具有的转向节臂14b。
在本转向装置34中,将上述上支承件28的中心与第一接头26的中心连结的线成为主销轴线KP。通过使转向电动机36a动作,如图中粗箭头所示,转向致动器36所具有的致动器臂36c绕致动器轴线AL转动,该转动由拉杆38传递从而转向节14a绕主销轴线KP转动。也就是说,如图中粗箭头所示,车轮12被转向。根据这样的构造,在本转向装置34中,包括致动器臂36c、拉杆38、转向节臂14b等而具备将转向电动机36a的旋转动作变换为车轮12的转向动作的动作变换机构44。
转向装置34的转向致动器36配设于下臂16。因而,能够简便地进行模块10向车身的组装作业。直截了当地说,通过将下臂16的基端部安装于车身的纵梁,将上支承件28安装于车身的轮胎罩的上部,能够将该模块10搭载于车辆。也就是说,本模块10被设为在相对于车辆的搭载性上优异的模块。
例如,如图2A中示意性所示,模块10能够针对车辆的左右2个车轮12(以下,有时称作“前轮12”)的各自配置。若关于车轮12的转向来说,则在该车辆中,2个模块10各自的转向装置34独立地由作为控制器的转向电子控制单元(以下,有时省略为“转向ECU”,在图中示出为“S-ECU”)50控制。具体而言,各模块10的转向装置34的转向电动机36a的控制(也就是说,向转向电动机36a的供给电流的控制)由对应的转向ECU50进行。因此,能够视为也包括转向ECU50而构成了转向装置34。顺便一提,转向ECU50构成为包括具有CPU、ROM、RAM等的计算机、转向电动机36a的驱动电路(例如,在转向电动机36a是无刷DC电动机的情况下是变换器)等。
本车辆能够视为搭载有包括与2个前轮12分别对应的2个转向装置34而构成的实施例的转向系统。该转向系统是所谓的线控转向型的转向系统,具有用于接受驾驶员的转向操作的操作装置52作为其构成要素。操作装置52具有作为转向操作构件的方向盘54、用于检测该方向盘54的旋转角即操作角作为转向操作构件的操作位置的转向传感器56、向方向盘54施加操作反作用力的反作用力施加装置58及作为该操作装置52的控制器的操作电子控制单元(以下,有时省略为“操作ECU”,在图中表示为“O-ECU”)60。各转向ECU50、操作ECU60连接于CAN(car area network(汽车局域网)或controller area network(控制器局域网))62,能够经由该CAN62而互相通信。
另外,如图2B所示,在本车辆中,在左右的车门后视镜70各自的下部配设有用于监视该车辆的周围的相机72。这些相机72能够分别拍摄1对前轮12。由这些相机72分别拍摄并由图像处理单元74处理后的前轮12的图像数据能够经由CAN62而分别由转向ECU50接收。
[B]转向系统的控制
i)转向控制转向装置34的转向ECU50执行用于将车轮12向与驾驶员的转向操作对应的转向位置ψ转向的转向控制。详细而言,将基于转向传感器56的检测的方向盘54的操作角即转向操作位置δ作为转向操作的程度,经由CAN62而从操作ECU60取得,基于该取得的转向操作位置δ来决定在车轮12中应该实现的转向位置ψ即目标转向位置ψ
顺便一提,也可以取代转向操作位置δ而采用驾驶员向方向盘54施加的转矩即转向操作力作为转向操作的程度,基于该转向操作力来决定目标转向位置ψ
虽然基于实际的转向位置ψ相对于目标转向位置ψ
具体来说,在本转向装置34中,转向ECU50基于目标转向位置ψ
Tq=G
上述式子是按照基于电动机旋转角偏差Δθ的反馈控制法则的式子。第一项、第二项、第三项分别是比例项、微分项、积分项,G
需要转向转矩Tq和向转向电动机36a的供给电流I处于特定的关系。详细而言,需要转向转矩Tq依赖于转向电动机36a发挥的力,因此需要转向转矩Tq和供给电流I大概处于比例关系。按照这一点,转向ECU50基于决定出的需要转向转矩Tq来决定向转向电动机36a的供给电流I,将该电流I向转向电动机36a供给。
在车轮12被转向的状态下车辆正在行驶时,在该模块10上作用基于悬架几何学的自回正转矩(也就是说,要使车轮12位于直行状态位置的力)。因此,为了将车轮12维持为目标转向位置ψ
需要说明的是,如上所述,也可以经由需要转向转矩Tq而基于电动机旋转角偏差Δθ来间接地决定供给电流I,但也可以不使用需要转向转矩Tq,按照下述式子而基于电动机旋转角偏差Δθ直接地决定供给电流I。
I=G
上述式子中的G
ii)车轮的转向位置的推定和基准电动机旋转角的设定
如先前说明那样,车轮12的转向位置ψ和转向电动机36a的动作位置即电动机旋转角θ以使各直行状态位置(也就是说,转向电动机36a的基准电动机旋转角θ
但是,如上所述,若IG开关被设为断开状态,则电力向转向ECU50、转向电动机36a的供给被切断,转向ECU50会丢失实际电动机旋转角θ。详细而言,在本转向装置34中,由于采用了比较大的减速比的减速器36b,所以相对于转向电动机36a的1圈旋转而车轮12的转向位置ψ仅变化1~2°。另一方面,电动机旋转角传感器只能检测转向电动机36a的360°内的角度位置(相位),转向ECU50基于该检测到的角度位置和设定的基准电动机旋转角θ
为了不使上述车轮的转向位置ψ的偏离产生,本转向装置34执行设定成为转向电动机36a的电动机旋转角θ的基准的基准电动机旋转角θ
第一基准设定处理在车辆的工作开始时(具体而言是IG开关被设为接通状态时)执行,基于依据由相机72拍摄到的车轮12的图像的数据而推定出的该车轮12的转向位置ψ来进行。
由相机72得到的车轮12的图像(详细而言是右侧的前轮12的图像)示意性地如图3A、图3B、图3C所示,图3B示出了车轮12位于直行状态位置的状态,图3A、图3C分别示出了从直行状态位置向左侧、右侧转向的状态。基于由相机72拍摄到的图像由图像处理单元74进行图像处理后的图像数据,转向ECU50推定IG开关被设为接通状态的时间点下的车轮12的转向位置ψ作为初始转向位置ψ
上述的初始目标转向位置ψ
转向ECU50确定初始转向位置ψ
顺便一提,不管初始目标转向位置ψ
如先前说明那样,利用了相机72的车轮12的转向位置ψ的推定精度决不能说充分,因此,即使执行了上述第一基准设定处理,也有可能残留若干的转向位置ψ的上述偏离。即使转向位置ψ的偏离是稍微的,例如也可能产生因长期的车辆的行驶而轮胎12a发生偏磨损之类的不希望的现象。第二基准设定处理是用于执行能够实现充分准确的转向位置ψ的转向控制的处理。该第二基准设定处理基于在车辆的行驶中车轮12被维持为特定的转向位置ψ时的向转向电动机36a的供给电流I来进行。详细而言,基于车轮12的转向位置ψ被维持为直行状态位置即基准转向位置ψ
在第二基准设定处理中,转向ECU50以在某种程度的时间(例如,1sec)内车速v被维持为作为特定车速的设定车速v
若关于标准电流I
需要说明的是,标准电流I
在本转向装置34中,不管是否在第一基准设定处理中认定为产生转向位置ψ的偏离而执行了上述偏离消除转向,都执行第二基准设定处理,但也可以仅在第一基准设定处理中执行了偏离消除转向的情况下执行第二基准设定处理。反过来说,在第一基准设定处理中没执行偏离消除转向的情况下,也可以不执行第二基准设定处理。
iii)控制流程
上述转向控制、上述第一基准设定处理、上述第二基准设定处理通过各转向ECU50分别执行转向控制程序、启动处理程序、转向位置调整程序而进行。以下,关于按照这些程序的处理依次简单说明。
在图4中示出流程图的转向控制程序由转向ECU50以短的时间间距(例如,数m~数十msec)反复执行。在按照该程序的处理中,首先,在步骤1(以下,省略为“S1”。其他步骤也是同样)中,取得方向盘54的操作位置δ,在接下来的S2中,基于取得的操作位置δ来决定成为车轮12的转向位置ψ的控制目标的目标转向位置ψ
在接着的S4中,基于电动机旋转角传感器的检测来取得当前时间点下的转向电动机36a的电动机旋转角即实际电动机旋转角θ,在S5中,决定实际电动机旋转角θ相对于目标电动机旋转角θ
在图5中示出流程图的启动处理程序在该车辆的IG开关被设为接通状态时由转向ECU50仅执行1次。在按照该程序的处理中,首先,在S11中,判定用于选择采用什么作为先前说明的初始目标转向位置ψ
在接着的S15中,发出相机72对车轮12拍摄的拍摄指示,在S16中,基于通过拍摄而得到的车轮12的图像数据来推定初始转向位置ψ
在图5中也示出了用于将车辆的工作停止时的转向位置ψ存储为存储转向位置ψ
在图6中示出流程图的转向位置调整程序由转向ECU50与转向控制程序并列地以短的时间间距(例如,数m~数十msec)反复执行。在按照该程序的处理中,首先,在S41、S42中,判定车速v是否是设定车速v
在S47中判定为电流偏差ΔI的绝对值不为阈值偏差ΔI
本发明的转向装置除了依据车轮的图像数据的上述第一基准设定处理之外,还能够执行依据向电动机的供给电力的上述第二基准设定处理。在车辆正在行驶时,从路面向车轮作用使该车轮位于直行状态位置的朝向的力(有时称作“自回正转矩”)。为了维持车轮的转向位置,电动机必须产生对抗自回正转矩的力,对电动机供给某些电流(有时称作“维持电流”)。自回正转矩的大小依赖于车轮的转向位置和车辆的行驶速度(有时称作“车速”),维持电流的大小依赖于自回正转矩的大小。第二基准设定处理是利用这一点来推定车轮的转向位置且基于该推定来设定成为电动机的动作位置的基准的基准动作位置的处理。上述第一基准设定处理具有能够比较迅速且简便地进行这一优点。相对于此,根据上述第二基准设定处理,虽然相对于稳定的供给电流的掌握需要某种程度的时间,但能够充分准确地掌握车轮的转向位置,能够实现充分准确的电动机的基准动作位置的设定。通过这样能够执行特性不同的2种基准设定处理,本发明的转向装置的实用性高。
上述电动机的动作位置例如在该电动机是旋转型电动机的情况下意味着电动机轴的旋转角度位置即电动机的电动机旋转角。同样,车轮的转向位置简单来说意味着车轮的转向角。进一步说,电动机的动作位置能够视为从基准动作位置起的动作量,该基准动作位置典型地能够设定为车辆正在直行的状态下的动作位置即直行状态位置。同样,车轮的转向位置能够视为从基准转向位置起的转向量,该基准转向位置典型地能够设定为车辆正在直行的状态的转向位置即直行状态位置。若使关于车轮的转向位置的基准转向位置和关于电动机的动作位置的基准动作位置匹配,则例如通过基于转向操作构件的操作(有时称作“转向操作”)来控制电动机的动作位置,能够根据转向操作而合适地控制车轮的转向位置。第一基准设定处理及第二基准设定处理这2个基准设定处理都能够视为为了使车轮的转向位置和电动机的动作位置匹配而设定电动机的基准动作位置的处理。
在由控制器执行的基本的转向控制中,决定与车轮应该转向的转向位置对应的电动机的动作位置即目标动作位置,基于实际的电动机的动作位置相对于该目标动作位置的偏差即动作位置偏差来决定向所述电动机的供给电流即可。车轮应该转向的转向位置即目标转向位置或上述目标动作位置例如基于驾驶员的转向操作来决定即可。具体而言,基于动作位置偏差,按照反馈控制法则来决定向电动机的供给电流即可。需要说明的是,如前所述,在车辆的行驶中车轮从直行状态位置被转向了某转向量的情况下,为了维持此时的转向位置,优选向电动机供给将对抗要将车轮恢复为直行状态位置的力即自回正转矩的力向车轮施加的电流。因此,控制器优选在转向操作的程度未变化的情况下,也以使将车轮的转向位置维持为目标转向位置所需的维持电流向电动机供给的方式控制向电动机的供给电流。为此,将按照上述反馈控制法则的供给电流的决定式中的积分项的增益恰当化即可。
如先前说明那样,第一基准设定处理与第二基准设定处理相比,电动机的基准动作位置的设定精度逊色,但能够简便地(换言之,迅速地)进行。根据该优点,第一基准设定处理优选为了快速地开始转向控制而在车辆的工作开始时即IG开关被设为接通状态时进行。若考虑IG开关被设为断开状态的情况下的向车轮的外力的作用,则第一基准设定处理更优选在每当车辆的工作开始时进行。
关于第一基准设定处理,例如可以基于车辆的工作开始时的转向操作构件的操作状态来决定目标转向位置,基于该目标转向位置与基于此时的车轮的图像数据而取得的转向位置之差来进行第一基准设定处理,另外,例如也可以存储车辆的工作停止时的车轮的转向位置,基于该存储的转向位置与在车辆的工作开始时基于车轮的图像数据而取得的转向位置之差来进行第一基准设定处理。
另一方面,第二基准设定处理能够基于在车辆的行驶中正向电动机实际供给的电流和与车轮的转向位置及车辆的行驶速度建立了关联的标准电流之差来进行。关于该标准电流,例如在车轮被维持为某转向位置时,可以基于此时的车速和车轮的目标转向位置,作为为了与此时的自回正转矩对抗而此时应该向电动机供给的电流而决定,另外,例如也可以作为在车辆的行驶时实际检测到的向电动机的供给电流,(详细而言是车辆以特定的车速行驶且车轮的转向位置被维持为特定的位置时的电流)而存储。顺便一提,若考虑自回正转矩几乎不作用而标准电流与实际正向电动机供给的电流之差容易掌握,则第二基准设定处理优选在车辆正以特定的速度直行时进行。
- 转向装置用轴、转向装置用轴的制造方法及电动助力转向装置
- 电动助力转向装置的控制方法、电动助力转向装置以及搭载了该电动助力转向装置的车辆