一种基于多传感器的人体下肢姿态采集及足底振动康复系统
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及到医学康复工程领域,具体是涉及一种基于多传感器的人体下肢姿态采集及足底振动康复系统。
背景技术
近年来,振动刺激作为一种物理康复治疗手段在康复医学及运动医学中被广泛应用。其具有安全性高、重复性强、舒适性好、非侵入式等优点。在老年人、神经损伤患者的康复中也逐渐得到应用。有助于提高人体的肌肉力量和人体平衡能力。但是足部振动刺激的效果由于受振动特性、频率、振幅以及振动强度、频次、间歇时间等众多因素的影响,其作用的机制比较复杂。大多数临床研究者采用随意的振幅和频率,具有摸索性,尚未形成适宜的振动刺激的条件,并且由于个体吸收振动的差异、个体心理承受的差异也会影响振动刺激的临床应用。因此,对于不同的患者无法形成一套统一标准的振动康复疗程。同样振动刺激在运动员的训练中也得到广泛的应用,能够刺激人体肌肉的本体感受器,增强人体中枢神经系统的协调能力。但是由于个体的差异,不同的个体的最有效的振动刺激条件是不同的。大多数情况都是根据人体主观的感受或者以往的经验去调整振动刺激条件,振动训练的效果无法达到最佳。目前市场上振动康复产品占地面积较大,价格比较昂贵,而且其振动康复训练的强度也是根据人体主观的感受去调整。
目前大多数研究者主要以人体平衡指标、振动康复后肌肉力量强度以及人体姿势变化作为足部振动康复效果的指标。而这就需要实时采集振动刺激过程中,人体的肌电信号和人体姿势的变化。而目前市场上产生振动刺激以及采集人体肌电信号和人体姿势变化的设备都比较昂贵,并且功能单一,无法准确调整合适的振动刺激条件,从而更有效的进行康复的训练。
发明内容
为了克服上述现有技术,本发明提出了一种基于多传感器的人体下肢姿态采集及足底振动康复系统。其可以为足部提供振动刺激,并通过2.4~2.5GHz的IMS频段向上位机无线传输足部压力、人体下肢运动姿态、表面肌电信号等数据,通过PC端的上位机处理数据,显示人体下肢姿势,肌肉力、足部压力的变化,实时的检测足部振动康复的效果,及时地调整振动刺激的条件,以达到更有效的康复训练。
本发明的目的至少通过如下技术方案之一实现。
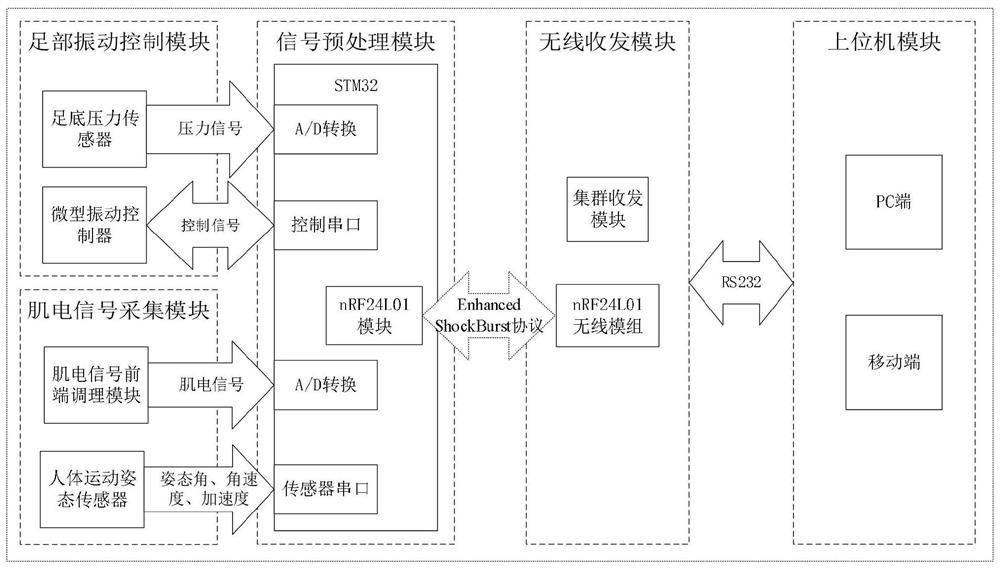
一种基于多传感器的人体下肢姿态采集及足底振动康复系统,其特征在于,包含足部振动控制模块、肌电信号采集模块、信号预处理模块、无线收发模块和上位机模块;
所述足部振动控制模块,包含了足底压力传感器和微型振动器;
所述足底压力传感器,用于检测对足底施加振动刺激时后足、前足和地面之间的压力
所述微型振动器,用于在上位机模块的控制下对前、后足局部位置施加振动刺激;
所述肌电信号采集模块,包含肌电信号前端调理模块和人体运动姿态传感器;
所述肌电信号前端调理模块,用于采集表面的肌电信号,并对电信号进行放大、滤波、工频陷波信号处理;
所述人体运动姿态传感器,用于检测振动刺激时人体大腿和小腿位置的姿态信息;所述姿态信息包括姿态角、角速度和加速度;
所述信号预处理模块,用于对采集的压力信号和肌电信号进行A/D转化;解析上位机对微型振动器的指令;接收人体运动姿态传感器的姿态数据;为数据添加标识,整合数据,并通过nRF24L01模块与无线收发模块进行连接通信;
所述无线收发模块,包含nRF24L01无线模组和集群收发模块;
所述nRF24L01无线模组,用于和多个nRF24L01模块进行连接通信,传输数据;
所述集群收发模块,用于处理高并发的数据接收和发送;
所述上位机模块,包含串口通信模块、数据处理模块和数据显示存储模块
所述串口通信,用于和无线收发模块进行连接通信,接收数据和发送控制微型振动控制器的指令;
所述数据处理模块,用于处理所述人体姿态传感器采集的姿态数据,获取人体下肢膝关节角度和下肢姿态特征的信息,处理足部压力传感器和肌电信号前端调理模块采集的经A/D转换后的数据,获取肌肉力和足部压力的特征信息;
所述数据显示存储模块,用于对人体下肢姿态信息实现三维图形显示,对于肌肉力和足部压力信息进行二维图形显示,并对人体下肢姿态、肌肉力和足部压力信息进行导出存储,便于后续的研究;
作为优选,所述无线收发模块包括nRF24L01无线模组和集群收发模块,可同时进行多通道的数据采集和指令发送;所述上位机模块为PC机、超算、云平台或这移动终端;
作为优选,所述肌电信号采集模块与第一块信号处理模块安装于可佩戴式的壳体内,能佩戴在人体下肢的大腿和小腿处,所述信号处理模块通过耳机插座与电极导线相连,电极导线通过按扣与电极片相连,电极片可根据需要贴在相应的肌肉上,同时壳体外部带有参考电极,能够以绑定位置的皮肤电势作为参考电极。同时所述肌电信号采集模块包含人体姿态传感器,可以采集佩戴位置的姿态信息;
作为优选,所述足部振动控制模块与第二块信号处理模块安装于可佩戴式的壳体内,能固定于在鞋子表面。压力传感器和微型振动器位于前、后足,通过导线与所述信号处理模块相连;
作为优选,所述可佩戴式的壳体内装有可拆卸式的5V1800mAh的锂电池能通过miroUSB公头给所述第一、二信号预处理模块、肌电信号采集模块和足部振动控制模块提供电源,并带有miroUSB母头的充电口;
作为优选,所述无线收发模块移植有FreeROST操作系统,通过所述nRF24L01无线模组,能与多路nRF24L01模块进行连接通信,将采集的数据通过URAST串口传输给上位机模块;接收上位机模块发送的微型振动控制器的控制指令并通过所述RF24L01无线模组发送给信号预处理模块;
作为优选,所述上位机模块可根据相应的标识,分割数据,对不同类型的数据采用不同处理方法。同时根据人体下肢的姿势、足部压力和肌电信号的变化,及时向所述足部振动控制模块下达指令,调整足部振动的位置和振动频率。以达到更好的振动康复效果。
和现有技术相比,本发明的优点在于:
基于单传感器的信息可以提供一定的人体下肢姿态信息,但是不能完整地表征足部振动刺激过程中,人体下肢的振动康复训练的状态。而在本发明中表面肌电信号能够反映对应肌肉的激活情况,可以反映足部振动刺激过程中,人体下肢肌肉力的变化,实时显示那一部分的肌肉得到训练;足底的压力信号可以检测足底和地面的受力情况,可以通过足部的受力分布,分析人体COP(压力中心)的变化。固定在大小腿处的人体姿态传感器,可以动态显示人体膝关节的关节角度及其运动状态。因此本发明中通过多传感器可以检测人体足部振动刺激的过程中康复训练情况。
另外,本发明可以通过获取足部振动刺激过程人体下肢姿势、肌肉力和足部的压力参数,研究足部振动刺激对人体平衡的作用机理,同时微型振动器分布于足部的前、后足,可以对老年人,下肢运动障碍的患者进行一定的康复振动训练,对于运动员也可以提供振动训练,提高一定的运动技能。本发明中,信号基于无线模组进行传输,可以简化掉上位机和传感器之间的信号线,摆脱了线材的束缚,减少了振动康复训练过程中对训练效果的影响,使得数据的检测更加的便捷。此外除了传统的PC上位机外,本发明还可以使用Android手机等移动端进行数据的无线收发和数据处理,极大的则更加了系统的便捷性和实用性,便于家庭、社区、训练场等环境的使用。
附图说明
图1为本发明实施例的基于多传感器的人体下肢姿态采集及足底振动康复系统模块示意图;
图2为本发明实施例的多传感器分析控制流程图;
图3为本发明实施例的具体结构图;
图4本发明实施例中的PC端上位机示意图;
具体实施方式
下面将结合实施例和附图对本发明的具体实施进行说详细明,但本发明的实施范围并不局限于此。
如图1所示,一种基于多传感器的人体下肢姿态采集及足底振动康复系统,其包含足部振动控制模块、肌电信号采集模块、信号预处理模块、无线收发模块和上位机模块。
本发明的足部振动控制模块又包含足底压力传感器和微型振动器,压力传感器和微型振动器分别位于前、后足,通过导线与所述信号处理模块相连。压力传感器检测足底施加振动刺激过程中后足、前足和地面之间的压力。微型振动器在上位机模块的控制下对前、后足局部位置施加振动刺激。足部振动控制模块与第二块信号处理模块安装于可佩戴式的壳体内,能固定于在鞋子表面。可佩戴式的壳体内装有可拆卸式的5V 1800mAh的锂电池能通过miroUSB公头给肌电信号采集模块提供电源,并带有miroUSB母头的充电口。
本发明的肌电信号采集模块,包含肌电信号前端调理模块和人体运动姿态传感器,其中肌电信号前端调理模块,用于采集表面的肌电信号,并对电信号进行放大、滤波、工频陷波的处理。其中人体运动姿态传感器,用于检测振动刺激时人体大腿和小腿位置的姿态信息;所述姿态信息包括姿态角、角速度和加速度;肌电信号采集模块与第一块信号处理模块安装于可佩戴式的壳体内,能佩戴在人体下肢的大腿和小腿处,所述信号处理模块通过耳机插座与电极导线相连,电极导线通过按扣与电极片相连,电极片可根据需要贴在相应的肌肉上,同时壳体外部带有参考电极,能够以绑定位置的皮肤电势作为参考电极。同时所述肌电信号采集模块包含人体姿态传感器,可以采集佩戴位置的姿态信息。
本发明无线收发模块移植有操作系统,通过所述nRF24L01无线模组,能与多路nRF24L01模块进行连接通信,将采集的数据通过URAST串口传输给上位机模块;接收上位机模块发送的微型振动控制器的控制指令并通过所述RF24L01无线模组发送给信号预处理模块。
本发明的上位机模块通过URAST串口和无线收发模块进行数据的收发,可根据相应的标识,分割数据,对不同类型的数据采用不同处理方法。同时根据人体下肢的姿势、足部压力和肌电信号的变化,及时向足部振动控制模块下达指令,调整足部振动的位置和振动频率,以达到更好的振动康复效果。上位机模块,包含串口通信模块、数据处理模块和数据显示存储模块;其中串口通信模块,用于和无线收发模块进行连接通信,接收数据和发送控制微型振动控制器的指令;其中数据处理模块,用于处理所述人体姿态传感器采集的姿态数据,获取人体下肢膝关节角度和下肢姿态特征的信息,处理足部压力传感器和肌电信号前端调理模块采集的经A/D转换后的数据,获取肌肉力和足部压力的特征信息;其中数据显示存储模块,用于对人体下肢姿态信息实现三维图形显示,对于肌肉力和足部压力信息进行二维图形显示,并对人体下肢姿态、肌肉力和足部压力信息进行导出存储,便于后续的研究。
本实施例中,肌电信号采集模块与第一块信号处理模块安装于带有锂电池的可佩戴式壳体内,固定在大、小腿外侧,以便检测足部振动刺激时,大、小腿的姿态角、加速度和角速度;电极片贴于相应的肌肉群,通过电极导线于肌电前端调理模块相连,采集表面肌电信号;足部压力传感器分别安装在前、后足的位置,采集前、后足的压力信号。采集的数据实时地传输到上位机,经过相应的处理得出人体下肢姿态、相应的肌肉力以及足底的COP(压力中心),分析得出振动康复训练的状态,进控制足部振动刺激的位置和频率,具体如图2所示。
如图3所示,在本实施例中,表面肌电信号采用自研的表面肌电信号前端调理模块进行采集,压力传感器采用RFP603薄膜片柔性薄膜压力传感器,人体姿态传感器采用IMU901角度传感器。足部振动刺激由微型振动器提供。信号预处理模块实现传感器的数据接收、AD转换和微型控制器的控制。由无线收发模块中nRF24L01模组实现数据的无线接收和发送,并通过USRAT和PC上位机通信。由PC上位机实现数据的处理,显示和数据的存储的功能。
本发明工作前需要首先固定各个传感器。使用扎带分别将肌电信号采集模块固定在两个大、小腿外侧,将电极片贴在相应肌群前,剔除相关的肌群皮肤上的毛发,并使用酒精对其擦拭至微红。同时在将足部振动控制模块分别安装在两个鞋子的外侧,足底压力传感器和微型振动控制器分别固定在两只鞋的内部位于前、后足的位置。通过导线和足部振动控制器相连接。
整个系统由锂电池供电,打开电池开关,使得各个模块上电工作,无线收发模块由USB线和电脑USB串口相连,由电脑进行供电。如图4所示,打开PC端的上位机,点击上面的检测串口,选择正确的串口,设置好波特、校验位和停止位,打开串口,开始监听无线收发模块的中nRF24L01模组连接情况,等待相关模块连接成功后,采集按钮由灰色变成红色,点击采集则发送命令给各个模块,各个模块开始发送采集到的数据,界面上实时显示表面肌电信号、足底压力信号以及人体下肢大、小腿的运动姿态。分析采集的数据得出振动康复训练的情况后,可以通过发送窗口给足部振动控制模块下达指令调整足部振动的位置和频率,以达到更好的振动康复效果。点击采集按钮后其更新为停止。点击停止按钮,将停止接收数据。点击断开按钮,无线收发模块将断开与各个模块的无线连接。点击断开串口按钮后,上位机将断开与无线收发模块的连接。点击保存弹出设置保存地址的窗口,设置好后采集的所有数据会以CSV格式保存到PC端,便于后续的研究。当然本发明也可以配合远程数据云平台,支持个体长期数据连续记录、分析,实现个性化管理。
- 一种基于多传感器的人体下肢姿态采集及足底振动康复系统
- 一种基于并联机构的足底平台式下肢康复机器人