用于无刷电机的高性能电流感测架构
文献发布时间:2023-06-19 12:16:29
本专利申请:
(i)要求巴莱特技术有限责任公司(Barrett Technology, LLC)和Claude F.Valle IV等人于2018年11月9日提交的针对HIGH PERFORMANCE CURRENT SENSINGARCHITECTURE FOR BRUSHLESS MOTORS(用于无刷电机的高性能电流感测架构)的待决在先美国临时专利申请序列号62/758,004的权益(代理人案卷号BARRETT-13 PROV);以及
(ⅱ)要求巴莱特技术有限责任公司和Claude F. Valle IV等人于2019年6月14日提交的针对HIGH PERFORMANCE CURRENT SENSING ARCHITECTURE FOR BRUSHLESS MOTORS(用于无刷电机的高性能电流感测架构)的待决在先美国临时专利申请序列号62/861,772的权益(代理人案卷号BARRETT-15 PROV)。
上述两(2)份专利申请藉此通过引用并入本文。
技术领域
本发明总体上涉及电机(motor),并且更特别地涉及永磁同步电机和用于操作该电机的电机控制器。
背景技术
为了领会本发明,理解如下一些核心概念是重要的:
(i)三相永磁同步电机(PMSM)的基本构造和操作;
(ii)涉及到的数学构建块中的两个:克拉克(Clarke)变换和帕克(Park)变换;
(iii)三相半桥操作:开关状态、电流路径、二极管循环;以及
(iv)脉宽调制(PWM)模式阶段(pattern moments)(激励和衰退)如何与电机模型和采样窗口相关。
如图1所示,三相永磁同步电机5典型地包括具有多个磁极15的固定定子10和具有至少一对北极和南极的可旋转转子20(为了图示清楚,可旋转转子20在图1中示为仅具有一对北极和南极,然而应当领会的是,在实践中,可旋转转子20通常具有多对北极和南极)。可旋转转子20可移动地设置在固定定子10内。当固定定子10的磁极15例如通过电机控制器25被适当地电激励时,可以在固定定子10的内部产生旋转磁场,使得可旋转转子20的磁极依次被吸引朝向固定定子10的磁极15或排斥远离固定定子10的磁极15,从而引起可旋转转子20在固定定子10内旋转。驱动轴30附接到可旋转转子20,以从三相永磁同步电机5提供输出功率。
三相永磁同步电机5由三相A、B、C来表征,并且电机控制器25通过供应三个相电流i
对于正弦绕组的永磁同步电机(PMSM),三个相电流波形中的每一个随着电机转动而呈现正弦形状(见图2)。电机转矩是这三个相电流的函数。但是,与控制一组三个正弦变化的电流值相比,控制恒定电流值更加容易和高效,因此首先使用克拉克变换将三个感测到的绕组电流转换至2相正弦
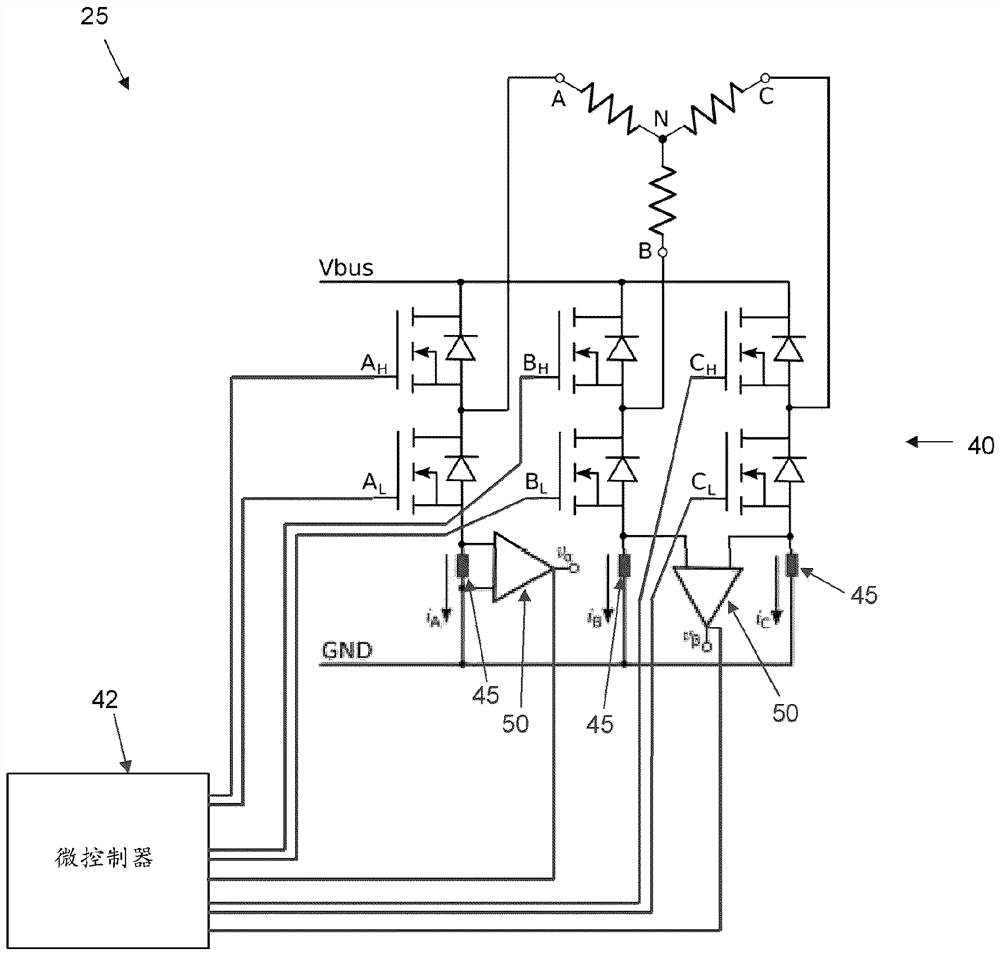
为了使用单个直流母线电压(Vbus)来使三个电机相中的电流变化,在图5所示的三相半桥放大器配置40中使用六个相同的功率金属氧化物半导体场效应晶体管(MOSFET)35。使用微控制器42来控制MOSFET门(gate)35的操作。将领会的是,微控制器42和三相半桥放大器配置40连同适当的支持电路和逻辑一起形成电机控制器25。
每个MOSFET门35都标有它控制的相(A、B、C)以及它是桥的高侧(H)还是低侧(L)(即AH、AL、BH、BL、CH、CL)。每个电机相都标有(A、B、C),其中N是Y形绕组电机的中性点。高侧MOSFET决定采用S[ABC]形式的放大器的状态。每个低侧MOSFET被操控为与其相关的高侧MOSFET相反的状态。这防止了从Vbus直接传导到地,也称为直通。
通过使用称为脉宽调制(PWM)的计算出的定时模式快速地将这三个桥(AH/AL、BH/BL、CH/CL)切换开关,可以控制在每个电机相(A、B、C)中流动的电流的量以达到期望的转矩。例如,下面标题为“状态描述”的部分中示出的表格中的PWM模式由一系列7个状态组成(即S[000]、S[100]、S[110]、S[111]、S[110]、S[100]和S[000]),其中4个状态(即S[000]、S[100]、S[110]和S[111])是唯一的。
见图6至图9。
电机的电感会极大地影响通过放大器的电流流动。这首先在S3中很明显。假设电流流
其中:
•
•
•
•
除了电感之外,其他因素也可能影响通过放大器的电流流动和/或影响三相永磁同步电机的性能,例如,导致线圈电阻变化的热效应、导致电机内摩擦变化的热效应、施加到电机的外部负载等。
出于这些原因,对于电机控制器25而言,重要的是要持续感测通过三个电机级A、B、C的电流并酌情调整三个相电流i
可以在图5所示的三相放大器图示的上下文中看到电流开始流动之前的初始状态S[000],即,图10中示出了初始状态S[000](在电流开始流动之前)。
图11至图16中可看到该示例的其余状态中的电流流动。
如上所述,电机的电感会极大地影响通过放大器的电流流动。并且,除了电感之外,其他因素也可能会影响通过放大器的电流流动和/或影响三相永磁同步电机的性能,例如,导致线圈电阻变化的热效应、导致电机内摩擦变化的热效应、施加到电机的外部负载等。
因此,对于电机控制器25而言,重要的是要持续感测通过三个电机级A、B、C的电流并酌情调整三个相电流i
已开发了各种方案来感测通过三个电机级A、B、C的电流流动。三种最常见的架构是所谓的“三传感器”架构、所谓的“单传感器”架构以及所谓的“标准双传感器(B和C)”架构。
在三传感器设计中,对于三相中的每一相,在接地的电流路径中有一个分流电阻45。微控制器在PWM模式的“衰退”阶段期间对三个放大器输出中的每一个进行采样(例如,经由运算放大器50),以获得绕组电流的全貌。见图17。
每个样本中都存在加性高斯白噪声(AWGN),但微控制器能够同时对两个输入进行采样,因此在计算
然后将控制系统应用于d轴和q轴电流。然后使用逆帕克变换将d轴和q轴作用(effort)转换回正弦α-β系统。最后,将α-β作用发送到PWM发生器,PWM发生器确定实现控制作用所需的三个占空比。这是采样后的5步骤过程:克拉克、帕克、控制、逆帕克、然后是PWM生成。
每个传感器(例如,运算放大器50)需要两个校准步骤来确定其偏移电压和放大器增益。对于三个传感器,这产生六个校准步骤。
单传感器设计最大限度地减小了硬件的尺寸和成本。见图18。
然而,由于以下几个原因,单传感器设计无法与多传感器系统的性能相匹配:
(i)由于最小采样时间,PWM模式需要被扭曲。这会在一些绕组中引入过量电流,需要通过在后续模式中应用精心构建的补偿模式来进行校正。相电流的快速注入/校正导致不合期望的可听噪声。
(ii)模式扭曲导致绕组电压与电机的自然反电动势电压不匹配。这会导致贯穿每个电周期产生不均匀的转矩。
(iii)由于需要取两个连续的电流样本,因此无法从任一样本中消除AWGN。因此,相重建数学方法得到具有二倍的AWGN的一个相。在将该噪声传递通过克拉克和帕克变换之后,
(iv)在选择要采样的相位、如何拉伸PWM模式的相关部分以允许采样以及如何在后续PWM模式中针对那些扭曲进行补偿中牵涉到大量的计算开销。
使用两个电流传感器(例如,运算放大器50)消除了单传感器设计的许多问题。见图19。
在衰退阶段期间,可以在每个PWM模式之间对相电流进行采样。不需要模式扭曲,因此电机不会产生可听噪声。
由于没有PWM扭曲,因此可以使施加的绕组电压与电机的自然反电动势电压相匹配。这得到贯穿每个电周期的恒定的转矩。
微控制器可以从两个电流传感器取得同时样本。这允许计算干净的
要注意的是,如果改为测量
虽然仍然需要从两个采样的相重建第三相电流,但该设计消除了样本选择、PWM模式拉伸和模式补偿中牵涉的所有计算开销。
鉴于上述情况,需要与竞争设计相比最大限度地减小噪声和计算复杂度的新的电流感测架构。
发明内容
为了创造高性能微型无刷电机控制器,开发了新型电流感应架构,其与竞争设计相比最大限度地减小了噪声和计算复杂度。曾努力实现双传感器设计,但并非是选择三个电机相中的两个进行采样并然后重建第三相电流,而是利用一个传感器的差分放大器(例如,差分运算放大器)来产生对电机的
总结表格:各种电流传感器架构的比较
在本发明的一个优选形式中,提供了一种用于控制三相永磁同步电机的操作的电机控制器,其中,三相永磁同步电机由三个相A、B、C来表征,并且进一步其中,三相永磁同步电机通过调节分别针对三个相A、B、C的三个相电流i
三相电源,用于供应三个相电流i
第一传感器,用于感测相电流i
第二传感器,用于跨相电流i
微控制器,用于控制三相电源的操作,以产生操作三相永磁同步电机所需的三个相电流i
在本发明的另一形式中,提供了一种用于控制三相永磁同步电机的操作的方法,其中,三相永磁同步电机由三个相A、B、C来表征,并且进一步其中,三相永磁同步电机通过调节分别针对三个相A、B、C的三个相电流i
供应三个相电流i
感测相电流i
调整相电流i
附图说明
本发明的这些和其他目的和特征将通过接下来对本发明的优选实施例的详细描述而被更充分地公开或变得显而易见,该描述将与附图一起考虑,其中相同的数字指代类似的部分,并且进一步其中:
图1是示出三相永磁同步电机的示意性视图;
图2是示出三相永磁同步电机的相电流的示意性视图;
图3是示出三相永磁同步电机的相电流的克拉克变换的示意性视图;
图4是示出三相永磁同步电机的相电流的帕克变换的示意性视图;
图5是示出可以用于驱动三相永磁同步电机的三相半桥放大器的示意性视图;
图6至图9是示出三相永磁同步电机的单嵌套PWM模式、相电压、相电流和α-β电流的示意性视图;
图10至图16是示出驱动三相永磁同步电机的三相半桥放大器的各种状态的电流流动的示意性视图;
图17是示出三传感器电流感测架构的示意性视图;
图18是示出单传感器电流感测架构的示意性视图;
图19是示出双传感器电流感测架构的示意性视图;
图20是示出本发明的新型电流感测架构的示意性视图;
图21是示出可以如何针对一些传感器架构选择分流电阻和运算放大器的示意性视图;以及
图22是示出可以如何针对其他传感器架构选择分流电阻和运算放大器的示意性视图。
具体实施方式
本发明包括提供和使用聚焦于α和β电流的新型双传感器电流感测架构。
更特别地,如图20所示,该新方法要将一个传感器(例如,运算放大器50)置于
电机控制器25的微控制器42读取A相上的传感器(即α电流传感器)和跨B和C相的传感器(即β电流传感器)的输出,并调整三相半桥放大器的操作(即,通过适当地控制MOSFET门35,以在三相永磁同步电机中产生期望的转矩。
使用这种架构,测量到干净的
对于该设计的任何具体实施方式,必须提供运算放大器50以将来自分流电阻45的电压信号转换成令人满意地跨微控制器模数(ADC)区段范围的电压信号,从而有效地设置可能要进行数字化的电流范围。对于上述三传感器、单传感器和标准双传感器设计中的运算放大器50,这是简单的事情,即为分流电阻45选择电阻和选择非反相运算放大器50,使得最大和最小期望电流根据图21所示的示意图和公式而分别放大到最大和最小ADC值。该公式示出了对于给定的运算放大器和分流电流将获得的ADC读数,其中I
这种电路分析也可以应用于该新的双感测设计的α放大器(即用于感测i
应当理解的是,本领域技术人员可以在已在本文中描述和图示以解释本发明的本质的细节、材料、步骤和部件布置方面做出许多额外的改变,而仍在本发明的原理和范围内。
- 用于无刷电机的高性能电流感测架构
- 电流感测放大器架构和电平移位器