LiDAR传感器单元及车辆用防盗系统
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及LiDAR传感器单元以及车辆用防盗系统。
背景技术
已知有对与对象物的距离进行测量的车辆用的LiDAR传感器。
现有技术文献
专利文献
专利文献1:日本特开2018-128432号公报
发明内容
发明欲解决的技术问题
在将这样的LiDAR搭载于车辆时,为了保护LiDAR传感器而设置有透明的盖。或者,在发出光的发光部、受光部之前,设置有透镜元件来提高聚光率。若设置这样的盖、内透镜等透镜元件,则从发光部发出的光弯曲,与不设置透镜元件的状态相比,测定数据会产生变化。
本发明提供一种即使设置有透镜元件,该透镜元件也不容易影响测定数据的LiDAR传感器单元。
用于解决问题的技术手段
本发明一方面涉及的LiDAR传感器单元具有:
LiDAR传感器;
透镜元件,所述透镜元件设置在从所述LiDAR传感器射出的光的光路上;以及
处理部,所述处理部输出由所述LiDAR传感器测定的包含测定对象的方位和距离在内的测定数据,
所述处理部构成为:对于特定方位不输出所述测定数据,所述特定方位为在相同环境下在所述透镜元件安装前后位于相同方位但距离不同的方位。
本发明一方面涉及的LiDAR传感器单元,具有:
LiDAR传感器,所述LiDAR传感器搭载于车辆,至少能够输出测定对象的距离数据;
处理部,所述处理部能够将包含由所述LiDAR传感器获取的距离数据在内的数据作为测定数据而输出,
所述处理部将规定的变动阈值以内的距离作为一定的距离而输出所述测定数据,所述规定的变动阈值基于在规定期间累积的所述距离数据中的最大值和最小值来确定。
本发明一方面涉及的LiDAR传感器单元,具有:
LiDAR传感器,所述LiDAR传感器搭载于车辆,并输出包含对象物的方位和距离在内的测定数据;
处理部,所述处理部对从所述LiDAR传感器输出的所述测定数据进行处理;以及
图像形成部,所述图像形成部对在第一时刻由所述LiDAR传感器获取的第一测定数据和在从所述第一时刻经过规定时间的第二时刻由所述LiDAR传感器获取的第二测定数据进行比较,并生成将方位相同但距离不同且为阈值以上的所述第二测定数据以与方位相同但距离的差异小于阈值的所述第二测定数据不同的方式表示的图像。
本发明一方面涉及的车辆用防盗系统,具有:
LiDAR传感器,所述LiDAR传感器搭载于车辆,并获取车辆周围的信息;以及
控制部,所述控制部控制所述LiDAR传感器,
所述控制部被构成为:在车辆停车期间,以第一周期获取第一测定数据,当在所述第一测定数据产生比规定值大的变动时,以比所述第一周期短的第二周期获取第二测定数据。
发明效果
根据本发明,提供一种即使设置有透镜元件,该透镜元件也不容易影响测定数据的LiDAR传感器单元。
根据本发明,提供一种适合于能够自动驾驶的车辆的LiDAR传感器单元。
根据本发明,提供一种适于车辆控制的LiDAR传感器单元。
根据本发明,提供一种在使用LiDAR传感器的同时节省电力的车辆用防盗系统。
附图说明
图1是安装有LiDAR传感器单元的车辆的俯视图。
图2是安装有LiDAR传感器单元的灯单元的示意图。
图3是LiDAR传感器的示意图。
图4是LiDAR传感器的框图。
图5是说明LiDAR传感器的检测原理的图。
图6是在未将外盖安装于LiDAR传感器的状态下进行传感检测时的示意图。
图7是在图6所示的状态下传感检测到的传感检测结果的示意图。
图8是在外盖安装于LiDAR传感器的状态下进行传感检测时的示意图。
图9是在图8的状态下传感检测到的传感检测结果的示意图。
图10是校正后的传感检测结果的示意图。
图11是由信号处理部执行的处理的流程图。
图12是描绘了输出数据和原始数据的曲线图。
图13是LiDAR传感器系统的框图。
图14是由图像形成部执行的处理的流程图。
图15表示时刻t-1的车辆前方的情形。
图16表示时刻t的车辆前方的情形。
图17表示在时刻t图像形成部输出的图像。
图18是安装有车辆用防盗系统的车辆的俯视图。
图19是车辆用防盗系统的框图。
图20是车辆用防盗系统执行的处理的流程图。
图21示出了在时间t-1时停放的车辆周围的状态。
图22是在图21的状态下图像形成部所形成的图像。
图23表示在时刻t时停车的车辆的周围的情形。
图24是在图23的状态下图像形成部形成的图像。
符号说明
1 车辆
3 车辆控制部
10 LiDAR传感器单元
11 壳体
12 外盖(透镜元件)
20 LiDAR传感器
30 灯单元
41 发光部
42 受光部
43MEMS镜
44 聚光透镜
45 光源控制部
46 镜控制部
47 信号处理部(处理部)
48 存储器(存储部)
101 车辆
103 车辆控制部
110 LiDAR传感器单元
111 壳体
112 外盖
120LiDAR传感器
141 发光部
142 受光部
143MEMS镜
144 聚光透镜
145 光源控制部
146 镜控制部
147 信号处理部(处理部)
148 存储器
149 图像形成部
201 车辆
202 车辆用防盗系统
203 车辆控制部
210 LiDAR传感器单元
220 LiDAR传感器
230 灯单元(光源)
241 发光部
242 受光部
243 MEMS镜
244 聚光透镜
245 光源控制部
246 镜控制部
247 信号处理部
251 图像形成部
252 图像比较部
253 灯控制部(控制部)
254 用户信息存储部
S 标准屏幕
θ 方位角
φ 仰角
d 距离
dmax 最大值
dmin 最小值
dmean 平均值
Dth 变动阈值
Δd 差分
dth 阈值
Δd 变动
A 行人
具体实施方式
以下,参照附图对实施方式的例子进行详细说明。在以下的说明所使用的各附图中,为了使各部件成为能够识别的大小而适当改变了比例尺。
<第一实施方式>
图1是安装有本发明的第一实施方式所涉及的LiDAR传感器单元10的车辆1的俯视图。如图1所示,在车辆1的右前部、左前部、右后部、左后部安装有LiDAR传感器单元10。
图2是表示安装于车辆1的左前部的LiDAR传感器单元10的示意图。在本实施方式中,LiDAR传感器单元10与对车辆1的周围进行照射的灯单元30一起设置。灯单元30可以是前照灯、后组合灯、日间行车灯、雾灯、车宽灯、停车灯。LiDAR传感器单元10包括壳体11和外盖12。在由壳体11和外盖12形成的空间的内部设置有灯单元30和LiDAR传感器20。
图3是LiDAR传感器20的示意图。如图3所示,LiDAR传感器20具备发光部41、受光部42、MEMS镜43以及聚光透镜44。
从发光部41射出的光被MEMS镜43反射,并经由聚光透镜44向车辆1的外部射出。从发光部41射出并被对象物反射的光(以下,称为返回光)经由聚光透镜44被MEMS镜43反射,并入射到受光部42。发光部41可以射出可见光,也可以射出红外线、紫外线等非可见光。LiDAR传感器20向对象物发出光,并根据到检测到返回光为止的时间来获取与对象物的距离。MEMS镜43构成为能够任意变更被MEMS镜43反射的光进行射出的方位。通过利用MEMS镜43变更反射光的射出方向,从而LiDAR传感器20获取大范围的信息。
图4是LiDAR传感器20的框图。如图4所示,LiDAR传感器20具备发光部41、光源控制部45、MEMS镜43、镜控制部46、受光部42、信号处理部47以及存储器48。光源控制部45控制发光部41的动作。镜控制部46控制MEMS镜43的动作。存储器48是可改写的存储单元。信号处理部47对从受光部42输出的信号进行处理,并向车辆控制部3输出。车辆控制部3控制车辆1的动作。
车辆控制部3根据来自LiDAR传感器20、其他传感器的输出、或者根据驾驶员的方向盘的操作、加速踏板的操作、制动踏板的操作而输出的信号,来控制发动机、制动装置、转向装置的动作。车辆控制部3执行车辆1的自动驾驶。或者,车辆控制部3对驾驶员的驾驶进行辅助。
信号处理部47具备处理器和存储器。作为处理器的例子,可举出CPU、MPU、GPU。处理器可以包括多个处理器核。作为存储器的例子,可举出ROM、RAM。ROM可以存储用于执行上述处理的程序。该程序可以包含人工智能程序。作为人工智能程序的例子,可列举出基于深度学习的已学习神经网络。处理器构成为指定存储在ROM中的程序的至少一部分并在RAM上运行,与RAM协作地执行处理。信号处理部47也可以通过微控制器、FPGA、ASIC等专用集成电路来实现。
使用图5,简单说明LiDAR传感器20的检测原理。
信号处理部47获取到向哪个方位发出的光碰到对象物并反射回来为止花费了多少时间这样的信息。基于此,信号处理部47输出方位信息和到该方位上的物体的距离。一般地,LiDAR传感器20输出方位角θ[°]、仰角φ[°]、距离d[m]的数据。
例如,光源控制部45控制发光部41使其以规定时间间隔发光。镜控制部46在某检测范围内,在纵方向上设定100个检测点,在横方向上设定360个检测点。镜控制部46按照使从发光部41向MEMS镜43入射的光依次向各个检测点反射的方式控制MEMS镜43。
受光部42针对各个测定点检测碰到对象物而反射回来的返回光,并将检测到返回光的情况向信号处理部47输出。MEMS镜43使从发光部41发出的光依次向各个测定点反射,因此受光部42依次检测出的返回光能够作为从各个测定点反射后的光进行处理。例如,在设定了36000个检测点的情况下,第一次检测到的返回光和第36001次检测到的返回光可以视为从相同的方位返回的光。或者,在到朝向360000点的检测点的全部检测点发出光为止花费0.01秒的情况下,从某时刻开始0.01秒后发出的光和从某时刻开始0.02秒后发出的光可以作为向相同方位发出的光进行处理。
信号处理部47针对各个测定点,测定从发光部41发出光的时间到检测到返回光为止的时间。信号处理部47基于各个测定的时间,计算与对象物的距离。这样,信号处理部47与各个检测点的方位相关联地输出距离。信号处理部47为了表示某方位(θ,φ)的距离为d,而输出(θ,φ,d)这样的数据。
另外,如图2所示,在LiDAR传感器20的发光部41的射出光的方向、受光部42的光入射的方向上设有外盖12。外盖12由于车辆1设计的制约而大多由曲面构成。特别是,如图1所示,在车辆1的右前部、左前部、右后部、左后部这样的车辆1的拐角部分设置有LiDAR传感器20的情况下,如图2所示,存在外盖12的曲面的曲率局部地变大的部位12a。
当LiDAR传感器20的光通过曲率像这样局部地变大的部位12a时,光会发生折射。因此,LiDAR传感器20会测定从本来设想的方位偏离的方位的距离。因此,在本实施方式的LiDAR传感器20中,构成为:在产品出厂前确定会较大折射的方位并存储在存储器48中,在出厂后的产品中不从LiDAR传感器20输出该位的数据。对该处理进行详细叙述。
图6表示在未将外盖12安装于LiDAR传感器单元10的状态下使LiDAR传感器20朝向标准屏幕S工作的情形。图7是将以图6所示的状态下输出的LiDAR传感器20的输出可视化的图。另外,图7、9是LiDAR传感器20的输出的示意图。实际上,输出点大量地存在,但为了便于作图,以比实际的输出点少的点数示出图7、9。
标准屏幕S是规定大小的平面状的屏幕。在图6中,使该标准屏幕S与LiDAR传感器20分开规定距离,使LiDAR传感器20工作。标准屏幕S为平面状,因此LiDAR传感器20的输出也使测定点的点组形成平面。信号处理部47将在外盖12未安装于LiDAR传感器单元10的状态下对标准屏幕S进行传感检测时的输出存储于可改写的存储器48。
图8表示在将外盖12安装于LiDAR传感器单元10的状态下使LiDAR传感器20朝向标准屏幕S工作的情形。图9是使在图8所示的状态下输出的LiDAR传感器20的输出可视化的图。
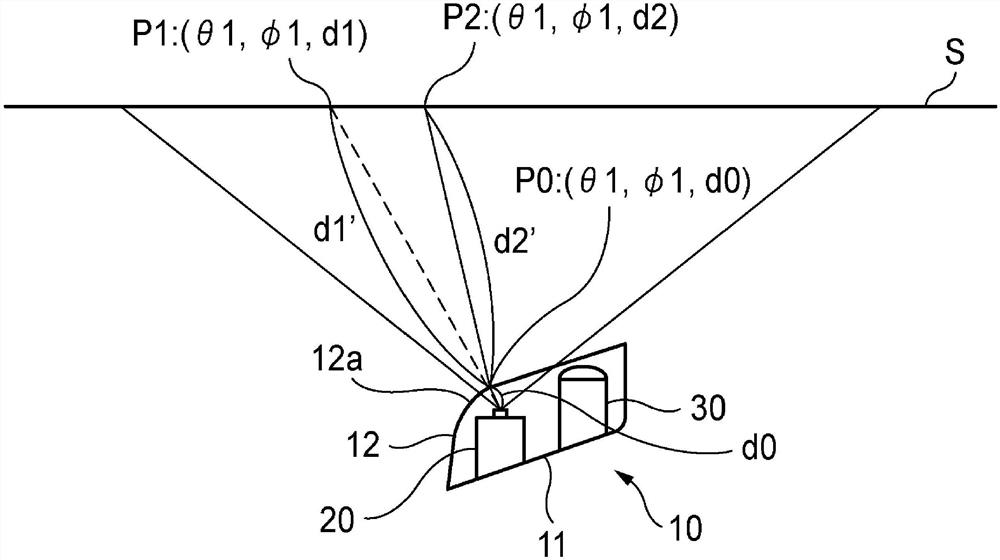
当在安装外盖12的状态下使LiDAR传感器20工作时,如图8所示,光在外盖12的曲率局部较大的部位12a处发生折射。在图8中,用虚线表示在没有外盖12的情况下通过的光的轨迹。另外,在图8中,对光的折射情况变形地绘制。
如图6所示,向朝向曲率大的部位12a的方位(θ1,φ1)射出的光到达标准屏幕S的坐标表示为P1=(θ1,φ1,d1)。即,在该方位(θ1,φ1)中,到标准屏幕S的距离为d1。
如图8所示,向朝向曲率大的部位12a的方位(θ1,φ1)射出,并被部位12a折射后的光到达标准屏幕S的坐标表示为P2=(θ1,φ1,d2)。
即,实际上,尽管方位(θ1,φ1)中的到标准屏幕S的距离为d1,但如果安装外盖12,则LiDAR传感器20将方位(θ1,φ1)中的到标准屏幕S的距离误识别为d2。因此,若使从LiDAR传感器20直接输出的数据可视化,则如图9所示,与图7不同。
因此,在本实施方式中,LiDAR传感器20构成为:将以外盖12安装于LiDAR传感器单元10的状态传感检测到标准屏幕S时的输出与以未将外盖12安装于LiDAR传感器单元10的状态传感检测到标准屏幕S时的输出进行比较,在相同方位上的距离差异为阈值以上的情况下,不输出该方位的距离。
即,在图6~9所示的例子中,对于方位(θ1、φ1),在未将外盖12安装于LiDAR传感器单元10时的距离d1与将外盖12安装于LiDAR传感器单元10时的距离d2的差异的绝对值Δd=|d2-d1|大于阈值da的情况下(Δd>da),将该方位作为非输出方位存储于存储器48。
在图示的例子中,LiDAR传感器20计算折射后的光经过的光路的长度作为距离d2。即,距离d2是从LiDAR传感器20到部位12a的距离d0和从部位12a到点P2的距离d2’的总和。当设从部位12a到点P1的距离为d1’时,Δd=d2-d1=(d0+d2’)-(d0+d1’)=d2’-d1’。在d2’-d1’大于规定值da的情况下,信号处理部47将方位(θ1,φ1)作为非输出方位存储在存储器48中。
而且,在LiDAR传感器20的通常的使用时,信号处理部47构成为从存储器48读取非输出方位,如图10所示,对于相当于非输出方位的方位不输出数据。图10对在检测到检查屏幕S时从信号处理部47向车辆控制部3输出的输出数据进行可视化来表示。如图10所示,即使从LiDAR传感器20输出的数据的一部分欠缺,也能够掌握整体像。
一般而言,LiDAR传感器20的测定点(测定方位)大量存在。因此,即使忽略由于外盖12的折射而受到影响的测定点,也容易维持良好的分辨率。当然,根据本实施方式,也可以不对由外盖12的折射引起的数据进行修正,或者不进行例外处理,所以信号处理部47的处理负担减轻。
另外,信号处理部47也可以构成为:判定非检测方位的个数(n个)相对于全部测定点的个数(m个)的比率n/m是否为0.1以上,在该比率为0.1以上时,将错误信号输出到车辆控制部3,对于相当于非输出方位的方位也输出数据。
另外,在上述的实施方式中,说明了对安装外盖12之前和安装外盖12后的测定点进行处理的例子,但本发明不限于此。在LiDAR传感器单元10中,存在在由壳体11和外盖12形成的空间的内部设置有内透镜的情况。在安装该内透镜之前和安装该内透镜后,也存在由于内透镜的折射而要测定的方位发生变化的情况。在这样的情况下也可以应用本发明。
即,LiDAR传感器20也可以构成为:将以内透镜安装于LiDAR传感器单元10的状态传感检测到标准屏幕S时的输出与以未将内透镜安装于LiDAR传感器单元10的状态传感检测到标准屏幕S时的输出进行比较,在相同方位上的距离的差异为阈值以上的情况下,不输出该方位的距离。
另外,在本实施方式中,将以外盖12未安装于LiDAR传感器单元10的状态传感检测到标准屏幕S时的输出和以将外盖12安装于LiDAR传感器单元10的状态传感检测到标准屏幕S时的输出存储于可改写的存储器48。
外盖12有时因飞石等造成损伤或破损。这样,在带有伤痕的部位也会产生折射,或者光散射而无法很好地测定距离。即使是小的不显眼的损伤,在该损伤位于测定方位的延长线上的情况下,LiDAR传感器20也受到该损伤的影响。但是,由于产生小的损伤就更换外盖12是不现实的。
因此,在本实施方式中,能够定期地更新存储器48中存储的信息。例如,在车辆的定期检查等中,使用上述标准屏幕S进行检查。在该检查中,能够获取以未将外盖12安装于LiDAR传感器单元10的状态传感检测到标准屏幕S时的输出和以将外盖12安装于LiDAR传感器单元10的状态传感检测到标准屏幕S时的输出,并定期地进行改写。由此,能够构成为:对于因损伤而无法很好地测定距离的方位,不输出数据,能够避免因损伤引起的不良情况。
另外,在更换外盖12时,通过更新存储器48中存储的信息,也能够构成为根据更换后的外盖12的形状,不对折射程度大的方位输出数据。
另外,实现不向车辆控制部3输出使用图6至图10进行说明的非输出方位的确定以及非输出方位的距离的功能的电子电路也可以与实现检测光向受光部的入射并计算对象物的距离的功能的电子电路分开设置。即,也可以是内置于LiDAR传感器20的电子电路实现检测光向受光部的入射并计算对象物的距离的功能,且在LiDAR传感器20与车辆控制部3的通信路径的中途设置有电子电路,该电子电路实现不将非输出方位的确定以及非输出方位的距离向车辆控制部3输出的功能。
<第二实施方式>
此外,LiDAR传感器能够测定精密的距离。另外,LiDAR传感器能够以极短的时间间隔获取大量的测定数据。然而,由于这样能够以极高的分辨率测定距离,并且能够以极短的时间间隔获取测定数据,因此会大幅受到车辆的振动、声音、热、风、或者单纯的噪声等引起的波动的影响。
另外,由于在车辆的自动驾驶中使用,因此不需要包含0.1mm以下这样的细小的距离信息的LiDAR传感器的输出。
因此,在以下说明的本发明的第二实施方式中,提供适合于能够自动驾驶的车辆的LiDAR传感器单元10。
第二实施方式所涉及的LiDAR传感器单元10与在上述第一实施方式中使用图1至图5说明的LiDAR传感器单元10的结构以及检测原理相同。因此,省略第二实施方式所涉及的LiDAR传感器单元10的结构以及检测原理的说明。
图11是由信号处理部47执行的处理的流程图。
如图11所示,信号处理部47在时刻t算出与某方位(θ,φ)的对象物的距离为D(步骤S01)。即,时刻t的原始数据为(θ,φ,D)。信号处理部47在存储器48中存储时刻t的原始数据(θ,φ,D)。
接着,信号处理部47读取关于某方位(θ,φ)的最临近的过去的10个距离(步骤S02)。信号处理部47从这些距离之中提取最小值dmin和最大值dmax。另外,信号处理部47计算关于某方位(θ,φ)的最临近的过去的10个距离的平均值dmean(步骤S03)。信号处理部47在存储器48中存储这些dmin、dmax、dmean。
接着,信号处理部47计算关于某方位(θ,φ)的最临近的距离D[t-1]与本次测量的距离D[t]的差分Δd(步骤S04)。信号处理部47计算Δd=D[t]-D[t-1]。信号处理部47在存储器48中存储差分Δd。
信号处理部47从存储器48读取最小值dmin和最大值dmax,对最小值dmin与最大值dmax的差分乘以系数0.5来计算变动阈值dth(步骤S05)。信号处理部47在存储器48中存储变动阈值dth。
信号处理部47从存储器48读取差分Δd和变动阈值dth,比较差分Δd和变动阈值dth的绝对值(步骤S06)。
如果差分Δd的绝对值大于变动阈值dth的绝对值(步骤S06:否),则信号处理部47输出原始数据D[t]作为某方位(θ,φ)的距离。即,信号处理部47向车辆控制部3输出(θ,φ,D[t])作为时刻t的测定数据(步骤S07)。
如果差分Δd的绝对值小于变动阈值dth的绝对值(步骤S06:是),则信号处理部47将平均值dmean作为某方位(θ,φ)的距离而输出。即,信号处理部47向车辆控制部3输出(θ,φ,dmean)作为时刻t的测定数据(步骤S08)。
图12是将这样得到的测定数据和原始数据作图而得到的图表。在图12中,关于某方位(θ,φ),用X表示从LiDAR传感器20输出的原始数据的距离D,用四边形表示该原始数据由信号处理部47加工后输出到车辆控制部3的数据(称为输出数据)的距离d。另外,关于原始数据的距离与输出数据的距离重复的部位,以输出数据的距离(四边形)表示。
如图12所示,与由×表示的原始数据相比,由四边形表示的输出数据的变动得到抑制。
顺便提及,本发明人注意到LiDAR传感器的输出容易细微地变动。然而,即使将细微地变动的测定数据直接输出到车辆控制部3,车辆控制部3也并非使用这样细微地变动的值来控制车辆1。
另外,为了抑制这样的细微的变动,也可以考虑确定一定的阈值并不将该阈值以内的变动量输出到车辆控制部3。但是,对于LiDAR传感器的输出而言,本发明人注意到由于温度、湿度或者行驶状态等这样的多个因素,适合的阈值会发生变化。即,即使在某个状况下某个阈值为适当的阈值,但在其他状况下超过阈值的变动变得过多而阈值变得没有意义,或者在其他状况下低于阈值的变动变得过多而只能输出一定的距离数据。
因此,本发明人完成了本发明,即,始终累积规定期间的距离数据,根据该规定期间之间的最大值和最小值确定阈值,将根据该时间而变动的阈值以内的距离设置成一定的距离而将测定数据输出到车辆控制部3。根据这样的方式,由于适当地设定适于状况的变动阈值dth,因此能够以适度的变动阈值dth使因各种原因而变动的距离数据的变动平滑。
另外,在上述的实施方式中,说明了读取某方位的最临近的10个距离,但读取的距离的个数不限于10个。也可以读取任意数量的数据。读取的个数越多,输出到车辆控制部3的数据越难以产生变动。也可以根据从车辆控制部3输出的信号等,根据驾驶状况等使该系数变动。例如,也可以构成为:在假设在高速公路上行驶中等车辆的外部状况的变化较少的情况下,读取较多的个数。
另外,在上述实施方式中,说明了为了计算变动阈值,对(dmax-dmin)乘以系数0.5的情况,但与(dmax-dmin)相乘的系数能够任意地设定。系数可以设定为0~1的值。若增大系数,则能够抑制从LiDAR传感器单元向车辆控制部3输出的距离的变动。若减小系数,则容易使从LiDAR传感器单元向车辆控制部3输出的距离忠实地再现从LiDAR传感器输出的原始数据。
此外,也可以根据从车辆控制部3输出的信号等,根据驾驶状况等来使该系数变动。例如,在假设在高速公路上行驶中等车辆的外部状况的变化较少的情况下,也可以设定大的系数。
另外,在上述实施方式中,说明了在变动阈值在变动阈值以内的情况下(步骤S06:是),将最临近的过去10点的平均值dmean作为输出数据的距离的例子,但本发明不限于此。可以输出最临近的过去10点距离中的任意的距离代替平均值dmean,也可以输出最小值dmin、最大值dmax来代替平均值dmean。
<第三实施方式>
LiDAR传感器能够在多个测定点测定距离,能够精密地掌握周围的状况。但是,由于LiDAR传感器在短时间内输出较多的测定点,因此对其进行处理的处理装置产生较大的负担。此外,在自动驾驶或手动驾驶中的车辆的控制中,在状况发生变化时需要某种动作。
因此,在本发明的第三实施方式中,提供一种具有适于车辆的控制的输出的LiDAR传感器单元。
接着,对本发明的第三实施方式所涉及的LiDAR传感器单元110进行说明。
第三实施方式所涉及的LiDAR传感器单元110也具有与在上述第一实施方式中使用图1至图3说明的LiDAR传感器单元10相同的结构。另外,第三实施方式所涉及的LiDAR传感器单元110的检测原理也与使用图5说明的检测原理相同。因此,省略第二实施方式所涉及的LiDAR传感器单元10的结构以及检测原理的说明。
第三实施方式所涉及的LiDAR传感器单元110的功能块与第一实施方式的LiDAR传感器单元10的功能块不同。图13是本发明的第三实施方式的LiDAR传感器120的框图。如图13所示,LiDAR传感器120具备发光部141、光源控制部145、MEMS镜143、镜控制部146、受光部142、信号处理部147、存储器148以及图像形成部149。光源控制部145控制发光部141的动作。镜控制部146控制MEMS镜143的动作。存储器148是可改写的存储单元。信号处理部147对从受光部142输出的信号进行处理,并向图像形成部149输出。车辆控制部103控制车辆101的行为。图像形成部149基于从信号处理部147输出的信号,形成图像,并向车辆控制部103输出。
图14是由图像形成部149执行的处理的流程图。图15表示从某时刻t起规定时间前的时刻t-1的车辆的前方的情况。图15中的点组表示将LiDAR传感器120的测定数据直接可视化的点群。如图15所示,在时刻t-1,在车辆101前方的左方存在树木T。在时刻t-1,LiDAR传感器120对所有测定点测定距离d。图像形成部149获取时刻t-1的测定数据P[t-1]=(θ[t-1],φ[t-1],d[t-1])(步骤S101)。
图16表示某时刻t的车辆的前方的情形。图16中的点组表示将LiDAR传感器120的测定数据直接可视化的点群。在时刻t,在车辆101前方的左方存在树木T,并且在车辆101前方的右方存在行人。即,在从时刻t-1过度到时刻t时,行人进入车辆的前方。
在该时刻t,LiDAR传感器120也对所有测定点测定距离。图像形成部149获取时刻t的测定数据P[t]=(θ[t],φ[t],d[t])(步骤S102)。
图像形成部149在时刻t-1和时刻t计算相同的方位(θ,φ)上的距离的变动Δd=d[t]-d[t-1](步骤S103)。
图像形成部149形成使时刻t的LiDAR传感器120的输出可视化后的图像。此时,如图17所示,图像形成部149强调从时刻t-1到时刻t为止发生了变化的部位而形成图像。
首先,图像形成部149针对所有的方位,判定Δd是否大于规定的阈值dth(步骤S104)。
对于Δd小于规定的阈值dth的方位(步骤S104:是),图像形成部149利用通常的方法使时刻t的距离d[t]可视化(步骤S105)。例如在关于方位θ、φ的白色背景上用黑点描绘距离d[t]。
在Δd为规定的阈值dth以上的情况下(步骤S104:否),图像形成部149利用与通常的方法不同的方法使时刻t的距离d[t]可视化(步骤S106)。例如对于方位θ、φ在白色背景上用红色圆圈描绘距离d[t]。
图像形成部149如此形成图17所示的图像,并输出到车辆控制部103。图像形成部149以BMP、PNG、GIF、JPEG、TIFF等任意格式形成图像。
即,图像形成部149将在第一时刻t-1从LiDAR传感器120获取到的第一测定数据P[t-1]与在从第一时刻t-1经过了规定时间的第二时刻t从LiDAR传感器120获取到的第二测定数据P[t]进行比较,生成将方位相同、距离不同且为阈值以上的第二测定数据P[t]与方位相同且距离的差异小于阈值的第二测定数据P[t]以不同的形态表示的图像。
车辆控制部103也可以从图像形成部149获取图像,并显示在设置于车室内的显示器上。
这样,根据本实施方式所涉及的LiDAR传感器单元10,与最临近的状况不同的测定点和与最临近的状况没有变化的点被区别地显示。由于能够瞬间掌握与最临近的状况不同的测定点,因此车辆控制部103能够瞬间掌握与最临近的状况不同的点,而迅速地执行必要的动作。例如,在本实施方式中,车辆控制部103能够瞬间掌握与之前的状况不同的行人的出现,能够进行使车辆101停止的动作。
另外,图像形成部149可以与信号处理部147一体地构成,也可以分别构成。图像形成部149也可以设置在信号处理部147与车辆控制部103的通信路径的中途。
<第四实施方式>
由于LiDAR传感器能够获取车辆的周围的信息,所以考虑将LiDAR传感器用作在车辆的停车期间对可疑者想要打开车门进行监视等的防盗传感器。但是,存在LiDAR会消耗大量的电力,难以作为防盗传感器使用的观点。
因此,本发明的第四实施方式提供一种使用LiDAR传感器的同时省电的车辆用防盗系统。
图18是安装有本实施方式所涉及的车辆用防盗系统202的车辆1的俯视图。车辆用防盗系统202具有多个LiDAR传感器单元210。如图18所示,在车辆1的右前部、左前部、右后部、左后部安装有LiDAR传感器单元210。
本实施方式中使用的LiDAR传感器单元210与在上述的第一实施方式中使用图2、3说明的LiDAR传感器单元10相同,因此省略其说明。
图19是车辆用防盗系统202的框图。如图19所示,车辆用防盗系统202具备LiDAR传感器单元210、灯单元230、图像形成部251、图像比较部252以及灯控制部253(控制部)。如图19所示,LiDAR传感器单元210具备发光部241、光源控制部245、MEMS镜243、镜控制部246、受光部242以及信号处理部247。光源控制部245控制发光部241的动作。镜控制部246对MEMS镜243的动作进行控制。灯控制部253控制灯单元230的点亮熄灭。信号处理部247处理从受光部242输出的信号,并输出到车辆控制部203。车辆控制部203控制车辆201的行为。
图20是车辆用防盗系统202执行的处理的流程图。图21表示从某时刻t起规定时间前的时刻t-1时停车的车辆201的周围的情况。在时刻t-1,车辆201停在停车场。图22是图像形成部251基于在图21的状态下由LiDAR传感器220获取的测定数据而形成的图像I[t-1]。
在时刻t-1,LiDAR传感器220对所有测定点测定距离。图像形成部251获取时刻t-1的测定数据P[t-1]=(θ[t-1],φ[t-1],d[t-1]),并形成图22所示的图像I[t-1](步骤S201)。
图23表示在时刻t停车的车辆201的周围的情形。在时刻t,行人A从图23中的右上方接近停车中的车辆201。图24是在图23的状态下,图像形成部251根据LiDAR传感器220获取的测定数据而形成的图像I[t]。
在时刻t,LiDAR传感器220对所有测定点测定距离。图像形成部251获取时刻t时的测定数据P[t]=(θ[t],φ[t],d[t]),形成图24所示的图像I[t](步骤S202)。
图像比较部252将在时刻t-1获取到的图像I[t-1]与在时刻t获取到的图像I[t]进行比较。图像比较部252判定在两者的图像I[t-1]、I[t]中是否产生了规定值以上的差异(步骤S203)。例如,图像比较部252在两者的图像I[t-1]、I[t]存在差异的像素数为规定值以上时,判定为产生了规定值以上的差异。例如,图像比较部252在存在差异的像素数相对于构成图像的全部像素数为3%以上时,判定为两者的图像I[t-1]、I[t]产生了规定值以上的差异。存在差异的像素数相对于全部像素的设定为阈值的比例可以是5%、10%等,能够由用户阶段性地变更。
在两个图像I[t-1]、I[t]中没有产生规定值以上的差异的情况下(步骤S203:否),车辆用防盗系统202在经过第一期间后再次执行步骤S201(步骤S204)。
在两者的图像I[t-1]、I[t]中产生了规定值以上的差异的情况下(步骤S203:是),图像比较部252进行警报处理(步骤S205)。
在本实施方式中,图像比较部252进行以下的警报处理。首先,图像比较部252确定从本车辆201观察时在哪个方位产生差异。进而,图像比较部252将已确定的方位输出到LiDAR传感器220的光源控制部245以及镜控制部246。另外,在图示的例子中,确定的方位仅是本车辆201的右上的位置方向,但在多个方位产生差异的情况下,也可以确定多个方位并向LiDAR传感器220输出。进一步,灯控制部使灯单元230点亮,以照亮所确定的方位。图像比较部252也可以构成为向用户所持有的手机输出告知异常的信号。
进而,图像比较部252判定是否获取了警报解除信号(步骤S206)。例如,图像比较部252构成为能够从车辆控制部203或者用户的手机获取规定的警报解除信号。
在图像比较部252在规定期间内获取了警报解除信号后(步骤S206:是),图像比较部252解除警报(步骤S207),结束处理。
在图像比较部252在规定期间内未获取到警报解除信号的情况下(步骤S206:否),车辆用防盗系统202在经过第二规定期间后执行步骤S201(步骤S208)。在此,第二规定期间设定为比第一规定期间短。例如第一规定期间为30秒,第二规定期间为0.5秒。或者,第一规定期间为60秒,第二规定期间为1秒。即,车辆用防盗系统202以大约30秒的周期重复步骤S201~S203。
将以第一规定期间间隔获取到的测定数据称为第一测定数据。将以第二规定期间间隔获取到的测定数据称为第二测定数据。即,上述的实施方式构成为,在测定第一测定数据期间产生了比规定值大的变动时,以比第一周期短的第二周期获取第二测定数据。
LiDAR传感器220能够高精度地获取对象物的形状,因此适合于防盗系统。另外,LiDAR传感器220经常搭载于能够自动驾驶的车辆201。搭载于能够自动驾驶的车辆201的LiDAR传感器220虽然在行驶中工作,但不在停车中使用。使用了LiDAR传感器220的车辆用防盗系统202能够使用在停车中未使用的LiDAR传感器220,不需要为了车辆用防盗系统而另外使用传感器,是合理的。
进而,本实施方式所涉及的车辆用防盗传感器2构成为:在测定第一测定数据期间产生了比规定值大的变动时,以比第一周期短的第二周期获取第二测定数据。即,使得在平常时,为了减少电力的消耗,能够以第一周期使LiDAR传感器220动作,在某些状态发生变化而怀疑异常的情况下,能够以第二周期使LiDAR传感器220动作来详细地进行调查。由此,能够在抑制消耗电力的同时,在必要时获取高精度的信息。
另外,在本实施方式中,车辆用防盗系统202的光源控制部245也可以构成为:在停车中使LiDAR传感器220以比在行驶时进行的传感检测的分辨率低的分辨率进行动作,或者以比在行驶时进行的传感检测的周期长的周期进行动作。
在停车中以防盗用途来使用LiDAR传感器220的情况下,比行驶时要求的分辨率(测定点的数量)低的分辨率就足够了。另外,在停车中使用LiDAR传感器220作为防盗用的情况下,以比行驶时要求的周期(扫描周期)长的周期就足够了。通过以较低的分辨率、较长的周期使LiDAR传感器220动作,能够抑制由LiDAR传感器220消耗的电力。
另外,在本实施方式中,在图像比较部252确定产生差异的方位时,图像比较部252将在时刻t获取的图像I[t]以本车辆201为中心在周向上划分为12个区域,并确定该划分出的区域。图像比较部252也可以构成为:代替确定方位,而确定产生差异的像素属于哪个区域,并将所属的区域输出到灯控制部253。在该情况下,灯控制部253也可以构成为使能够向被输入的区域射出光的灯单元230点亮。
另外,在上述实施方式中,构成为在图像I[t-1]与图像I[t]产生了规定值以上的差异的情况下立即进行警报处理,但也可以构成为在产生了规定值以上的差异时,判定该差异是否与例如登记为可疑人物的行为模式的模式一致,在该差异与该模式一致时进行警报处理。
另外,警报处理可以采取发出光、发出声音并通知车辆201的所有者等公知的方法。
此外,在本实施方式中,车辆用防盗系统202也可以构成为能够对车辆201的所有者、登记的人物(称为用户)与未登记的人物进行识别。车辆用防盗系统202也可以具有用户信息存储部254。用户信息存储部254存储与用户相关联的特定形状。图像比较部252在判定为时刻t-1的图像I[t-1]与时刻t的图像I[t]存在差异之后,判定时刻t的图像I[t]中存在差异的部分是否与存储于用户信息存储部254的形状一致。如果两者一致,则灯控制部253通过与两者不一致的情况不同的方法使灯单元230点亮。
例如,如果存在差异的部分与存储在用户信息存储部254中的形状一致,则使灯具单元230朝向相应的方位常亮,如果存在差异的部分与存储在用户信息存储部254中的形状不一致,则使灯具单元230朝向相应的区域闪烁。例如,用户信息存储部254可以存储用户的面部的形状、用户拥有的钥匙扣的形状等。
灯控制部253在形状一致的情况和形状不一致的情况下使灯单元230的点亮方式不同,包括使灯单元230的点亮与闪烁、使闪烁不同、使点亮颜色不同、使亮度不同。另外,在灯单元230具有多个光源的情况下,使灯单元230的点亮方式不同包括使点亮的光源的数量、形状不同。
另外,图像形成部251、图像比较部252和灯控制部253可以与信号处理部247构成为一体,也可以分别构成。图像形成部251、图像比较部252以及灯控制部253也可以设置在信号处理部247与车辆控制部203的通信路径的中途。
另外,在上述实施方式中,说明了在时刻t-1的图像与时刻t的图像存在差异的情况下,图像比较部252向灯控制部253输出存在不同的方位,使灯控制部253朝向对应的方位射出光,但本发明不限于此。在LiDAR传感器单元210中设置有指向性扬声器的情况下,也可以构成为:在时刻t-1的图像与时刻t的图像存在差异的情况下,图像比较部252向音源控制部输出存在不同的方位,音源控制部使声音朝向与指向性扬声器对应的方位射出。
另外,在上述实施方式中,对设置于车辆201的右前部、左前部、右后部、左后部的LiDAR传感器220进行了说明,但本发明无论车辆201的搭载场所如何都能够应用于所有的LiDAR传感器220。
此外,在上述实施方式中,说明了LiDAR传感器220与灯单元230一起设置在共用的外盖12和壳体11的内部的例子,但本发明不限于此。LiDAR传感器220也可以与灯单元230分开设置。另外,LiDAR传感器220也可以设置在与摄像机、毫米波雷达等其他传感器共用的外盖12和壳体11的内部。
上述实施方式只不过是用于容易理解本发明的例示。上述实施方式所涉及的结构只要不脱离本发明的主旨,则能够适当地进行变更、改良。
在上述实施方式中,对设置于车辆1的右前部、左前部、右后部、左后部的LiDAR传感器单元进行了说明,但本发明无论车辆的搭载场所如何都能够应用于所有的LiDAR传感器单元。
并且,在上述实施方式中,说明了LiDAR传感器与灯单元一起设置在共用的外盖和壳体的内部的例子,但本发明不限于此。LiDAR传感器也可以与灯单元分开地设置。或者,LiDAR传感器也可以设置在与摄像机、毫米波雷达等其他传感器共用的外盖和壳体的内部。
本申请基于2019年1月10日申请的日本专利申请(日本特愿2019-002788)、2019年1月10日申请的日本专利申请(日本特愿2019-002789)、2019年1月10日申请的日本专利申请(日本特愿2019-002790)、2019年1月10日申请的日本专利申请(日本特愿2019-002791),其内容在此作为参照被引入。
产业实用性
根据本发明,提供一种即使设置有透镜元件,该透镜元件也不容易对测定数据造成影响的LiDAR传感器单元。
- LiDAR传感器单元及车辆用防盗系统
- 用于具有多LiDAR传感器的自动驾驶车辆的再校准确定系统