一种脉冲激励下基于数据驱动的非线性阻尼识别方法
文献发布时间:2023-06-19 12:19:35
技术领域
本发明涉及非线性系统参数识别方法技术领域,尤其是一种脉冲激励下基于数据驱动的非线性阻尼识别方法。
背景技术
非线性系统参数识别的目的是用来估计描述系统动力学特性的模型参数。随着工程机械的快速发展,对于线性振动系统的参数识别与分析逐渐趋于成熟。但是在实际工程应用中,由于多物理相互作用,许多系统表现出复杂的非线性行为,因此需要有效地非线性参数识别方法来描述非线性系统动力学特性。
发明内容
本发明提供了一种脉冲激励下基于数据驱动的非线性阻尼识别方法,目的在于有效识别非线性阻尼参数。
本发明采用的技术方案如下:
一种脉冲激励下基于数据驱动的非线性阻尼识别方法,识别多自由度非线性振动系统,所述多自由度非线性振动系统包括线性结构和非线性结构,所述非线性结构包括并联连接的阻尼项和线性刚度项:
识别方法包括如下步骤:
(1)将一个脉冲信号作用在所述多自由度非线性振动系统上,获得脉冲信号作用后的实测瞬时响应,利用实测瞬态响应得到特征位移和特征速度,提取瞬时频率,根据特征位移和瞬时频率获得阻尼-速度曲线;
(2)根据所述阻尼-速度曲线建立对应的动力学模型,根据所述动力学模型定义阻尼,然后与上述阻尼-速度曲线进行拟合,最终获得非线性结构的未知阻尼参数。
其进一步技术方案为:
所述步骤(1)具体包括如下子步骤:
11)向一个两自由度非线性振动系统施加一个脉冲信号,获得作用后的实测瞬态响应,根据响应数据定义特征位移δ
其中,t表示时间、x(t)、y(t)分别为非线性结构、线性结构的位移,δ(t)=x(t)-y(t)为非线性结构和线性结构之间的相对位移,ΔT为参与测量响应的最低频率的周期,δ
12)对相对位移δ(t)进行时频分析,根据小波变换得到的时频分析图提取瞬时频率,根据特征位移和瞬时频率,获得关于时间t的阻尼ζ
其中δ
结合非线性结构的速度,建立阻尼-速度曲线。
所述步骤(2)具体包括如下子步骤:
21)建立以非线性结构表征两自由度非线性振动系统的动力学方程:
其中,m、x分别为非线性结构的质量、非线性结构的位移,δ为非线性结构和线性结构之间的相对位移;k2、
且阻尼项
22)记
其中δ
23)将式(4)与所述阻尼-速度曲线拟合,基于模式搜索算法最终确定系统未知阻尼参数c、C。
本发明的有益效果如下:
本发明仅利用实测瞬态响应以及相关质量,而不需要事先了解母体结构的先验知识。基于测量获得输出信号,通过对实测瞬态响应的数据处理,有效识别了系统非线性阻尼参数,确定了两自由度非线性振动系统未知阻尼参数,具有实际工程意义。
附图说明
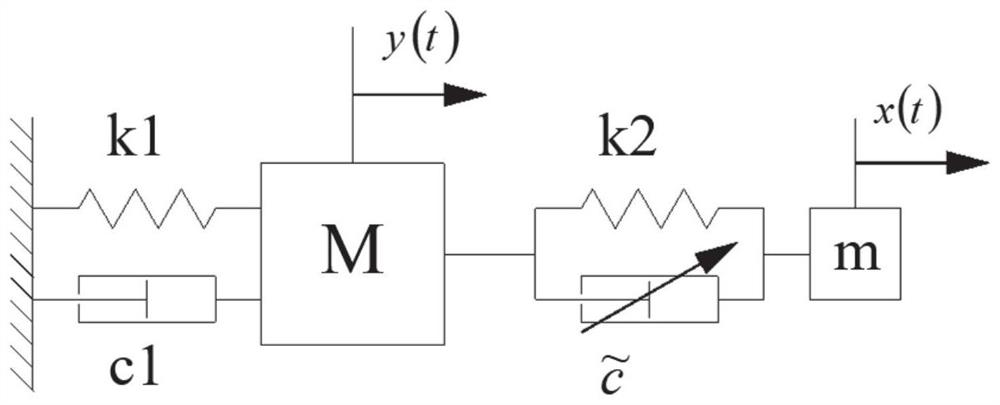
图1为本发明具体实施例的非线性振动系统的结构示意图。
图2为本发明具体实施例实测的阻尼-速度曲线与拟合的阻尼-速度曲线对比图。
具体实施方式
以下结合附图说明本发明的具体实施方式。
本实施例的一种脉冲激励下基于数据驱动的非线性阻尼识别方法,针对多自由度的非线性振动系统进行阻尼参数的识别,多自由度的非线性振动系统包括至少一线性结构(例如母结构)和与线性结构连接的非线性结构(例如局部附件),本实施例以如图1所示的两自由度非线性振动系统为例进行说明。图1中M表示线性结构的质量,m表示非线性结构的质量,且二者之间的线性耦合很弱,k1和k2分别表示线性结构、非线性结构的线性刚度项,c1表示线性结构的线性阻尼项,
识别方法包括如下步骤:
(1)生成一个脉冲信号,作用在两自由度非线性振动系统上,获得实测瞬态响应,利用实测瞬态响应得到特征位移和特征速度,提取瞬时频率,根据特征位移和瞬时频率获得阻尼-速度曲线,包括如下子步骤:
11)首先采用力锤结构生成一个脉冲信号,作用在两自由度非线性振动系统上,利用加速度传感器测量瞬态加速度响应,根据响应数据定义特征位移δ
其中,x(t)、y(t)分别为非线性结构、线性结构的位移,δ(t)=x(t)-y(t)为非线性结构和线性结构之间的相对位移,ΔT为参与测量响应的最低频率的周期,ΔT=0.1s;δ
12)对相对位移δ(t)进行时频分析,根据小波变换得到的时频分析图提取瞬时频率,根据特征位移和瞬时频率,获得关于时间t的阻尼ζ
其中δ
(2)根据获得的阻尼-速度曲线提出相应的动力学模型,根据动力学模型定义阻尼,与前述阻尼-速度曲线进行拟合,基于模式搜索算法确定系统未知阻尼参数,包括如下子步骤:
21)以非线性结构表征的两自由度非线性振动系统结构的动力学方程为:
m表示非线性结构质量,x表示非线性结构的位移,y表示线性结构的位移,δ=x-y表示非线性结构与线性结构之间的相对位移,
其中,阻尼项
以库仑阻尼为例,
且m=0.05,k
22)记δ=0.85δ
其中δ
23)通过将(5)式与前述阻尼-速度曲线拟合,基于模式搜索算法最终确定系统未知阻尼参数c、C。
如图2所示,为实测的阻尼-速度曲线与拟合的阻尼-速度曲线对比。
- 一种脉冲激励下基于数据驱动的非线性阻尼识别方法
- 一种脉冲激励下基于模式搜索的非线性刚度识别方法