电流传感器
文献发布时间:2023-06-19 12:19:35
技术领域
本申请基于2020年2月21日申请的日本申请特愿2020-28577,且主张基于该申请的优先权。该申请通过参照而整体被引入本申请中。
本发明涉及一种电流传感器。
背景技术
已知有一种电流传感器,其通过检测由电流激发的磁场来测定流过电流线的电流。日本特开2013-228315号公报中公开有一种电流传感器,其具有包围母线(电流线)的开放的主芯和与主芯的开放端相邻地配置于主芯的外侧的开放的副芯。磁敏元件配置于主芯的开放端之间。主芯为了集磁而设置。主芯由磁性体形成,因此在电流线非通电时产生剩余磁化。磁敏元件在非通电时也检测基于剩余磁化的磁场。该磁场不是由流过电流线的电流产生的磁场,因此,成为测定误差的一个原因。但是,在副芯中产生与主芯相反方向的剩余磁化。因此,基于副芯的剩余磁化的磁场减弱基于主芯的剩余磁化的磁场,降低主芯的剩余磁化的影响。
发明内容
日本特开2013-228315号公报中记载的电流传感器限定了副芯的剩余磁化减弱主芯的剩余磁化的范围。因此,关于磁敏元件的配置,限制较多。
本发明的目的在于,提供一种更容易地降低剩余磁化的影响的电流传感器。
本发明的电流传感器包括:能够被电流磁化的磁路;第一磁敏元件,其配置于电流通电时的磁场与由电流非通电时的磁路的剩余磁化引起的磁场朝向相同方向的位置;第二磁敏元件,其配置于电流通电时的磁场与由电流非通电时的磁路的剩余磁化引起的磁场朝向相反方向的位置。
依照本发明,能够提供可更容易地降低剩余磁化的影响的电流传感器。
本申请的上述及其它目的、特征和优点,通过参照例示本申请的附图的以下叙述的详细的说明来明确。
附图说明
图1A~1B是第一实施方式的电流传感器的概要图。
图2A~2D是表示施加到图1A~1B所示的电流传感器的外部磁场的概念图。
图3A是表示第一实施方式的第一和第二磁敏元件的位置的图。
图3B是表示比较例的磁敏元件的位置的图。
图3C是表示磁敏元件的位置与磁滞的关系的图表。
图4A~4C是第一实施方式的变形例的电流传感器的概要图。
图5A~5C是第一实施方式的变形例的电流传感器的概要图。
图6A~6B是第一实施方式的变形例的电流传感器的概要图。
图7A~7B是第一实施方式的变形例的电流传感器的概要图。
图8A~8B是第一实施方式的变形例的电流传感器的概要图。
图9A~9C是第一实施方式的变形例的电流传感器的概要图。
图10A~10B是第二实施方式的电流传感器的概要图。
图11A~11B是表示施加到图10A~10B所示的电流传感器的外部磁场的概念图。
图12A~12C是第三实施方式的电流传感器的概要图。
具体实施方式
下面,参照附图,对本发明的电流传感器1A~1J的几个实施方式进行说明。在以下的说明中,将电流线2A、2B延伸的方向称为X方向,将从电流线2A、2B的中心轴引到第一磁敏元件5的中心的法线延伸的方向称为Z方向,将与X方向和Z方向正交的方向称为Y方向。在电流线为母线(busbar)的情况下,Y方向与母线的宽度方向平行。在各图中,将在电流线2A、2B通电时施加到第一磁敏元件5的磁场的方向称为﹢Y方向,将其相反方向的方向称为﹣Y方向。本发明的电流传感器测定流过电流线2A、2B的电流,电流线2A、2B本身不包含在电流传感器中。但是,可以将电流传感器附近的电流线作为电流传感器的一部分装入。电流线2A、2B是电流流动的区域的一例,以下的实施方式以电流线为对象进行说明,但电流流动的区域不限于电流线,只要是连续的导电体即可。
(第一实施方式)
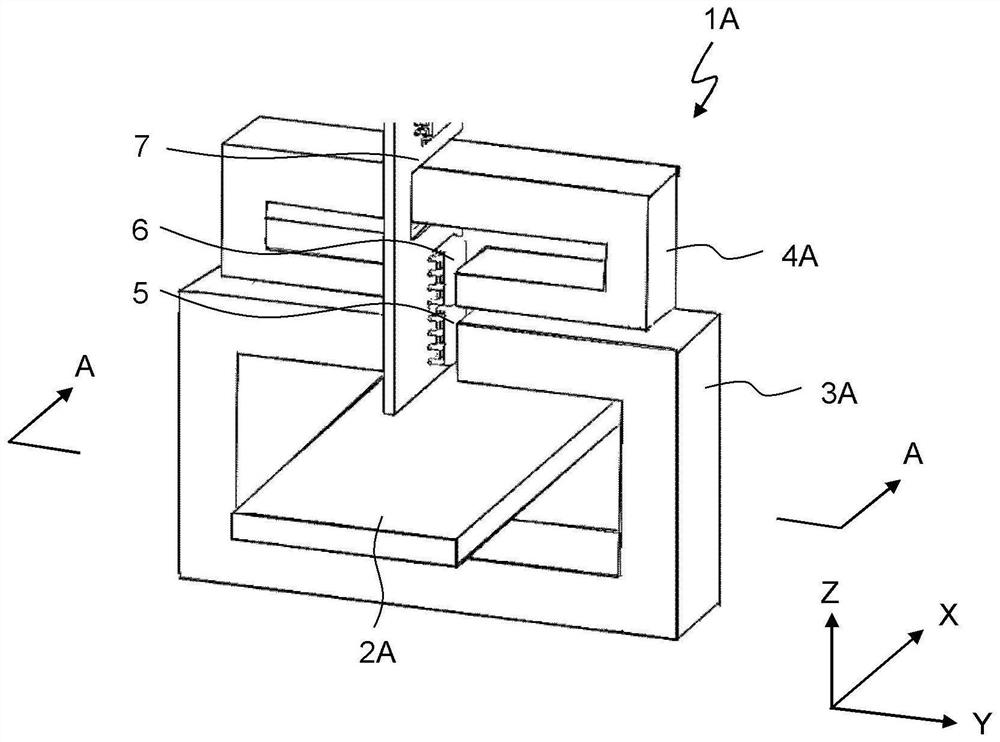
图1A是第一实施方式的电流传感器1A的立体图,图1B是沿图1A的A﹣A线的截面图。电流传感器1A具有包围电流线2A的第一磁路3A和位于电流线2A的外部的第二磁路4A。第一磁路3A和第二磁路4A处于与X方向正交的同一面内(Y﹣Z面内)。第一磁路3A和第二磁路4A是由NiFe等软磁性体的芯构成的磁路。电流线2A是具有矩形截面的平板状的母线。电流传感器1A例如为了测定流过连接于电池的母线的电流而使用,电流线2A的结构和种类没有任何限定。
从X方向观察,第一磁路3A具有大致矩形的形状,并具有沿Y方向延伸的一对长边31A、31B和沿Z方向延伸且与长边31A、31B正交的一对短边32A、32B。第一磁路3A是包围电流线2A的开放的磁路。在一长边31B的中央部设置有缺损部33,第一磁路3A的开放端34A、34B位于缺损部33的两侧。设有缺损部33的长边31B的其余部分形成第一磁路3A的两侧端部区域35A、35B。第二磁路4A在Z方向上与第一磁路3A相邻地设置。第二磁路4A位于电流线2A的外部,不包围电流线2A。第二磁路4A也与第一磁路3A同样具有大致矩形的形状,并具有沿Y方向延伸的一对长边41A、41B和沿Z方向延伸的一对短边42A、42B。第二磁路4A也是开放的磁路。在一长边41B的中央部设置有缺损部43,第二磁路4A的开放端44A、44B位于缺损部43的两侧。设置有缺损部43的长边41B的其余部分形成第二磁路4A的两侧端部区域45A、45B。第二磁路4A的缺损部43与第一磁路3A的缺损部33相对。第二磁路4A的两侧端部区域45A、45B顺着第一磁路3A的两侧端部区域35A、35B在Y方向上延伸。依照该结构,第二磁路4A容易被第一磁路3A磁化。
将第一磁敏元件5设置于第一磁路3A的缺损部33即两侧开放端34A、34B之间。将第二磁敏元件6设置于第二磁路4A的缺损部43即两侧开放端44A、44B之间。第一和第二磁敏元件5、6为霍尔元件,但也可以是AMR元件、TMR元件、GMR元件等磁阻效应元件。第一和第二磁敏元件5、6的感磁方向为Y方向,且彼此平行。具体而言,第一磁敏元件5检测将第一磁路3A的两侧开放端34A、34B连结的Y方向的磁场,第二磁敏元件6检测将第二磁路4A的两侧开放端44A、44B连结的Y方向的磁场。第一磁敏元件5与第二磁敏元件6的输出的极性相同。即,当施加相同方向的磁场时,第一磁敏元件5的输出的符号与第二磁敏元件6的输出的符号相同。第一磁敏元件5和第二磁敏元件6处于电流线2A的同侧,搭载于共用的基板7。因此,能够简化电流传感器1A的组装工序。
电流传感器1A具有:连接于第一磁敏元件5的第一放大器8;连接于第二磁敏元件6的第二放大器9;以及连接于第一放大器8和第二放大器9的加法器10。第一放大器8、第二放大器9、加法器10配置于基板7。第一放大器8将第一磁敏元件5的输出放大,第二放大器9将第二磁敏元件6的输出放大。加法器10将第一放大器8的输出和第二放大器9的输出相加。电流传感器1A将加法器10的输出输出至外部。
图2A概念性地表示电流线2A通电时的施加到电流传感器1A的外部磁场,图2B概念性地表示电流线2A非通电时的施加到电流传感器1A的外部磁场。图2C、2D分别表示基于模拟的图2A、2B的A部放大图。如图2A中以实线所示,在电流线2A通电时,在电流线2A的周围形成顺时针方向的磁通。第一磁路3A具有沿电流线2A产生的磁通的形状,因此如图中所示,顺时针地被磁化,且实现集磁效果。如图2C所示,在第一磁路3A的两侧开放端34A、34B之间,利用电流线2A产生的磁场和第一磁路3A产生的磁场,产生﹢Y方向的较强的磁场。将此时的第一磁敏元件5的输出设为正。如图2A所示,第一磁路3A的左侧的端部区域35A输出的磁通的一部分,被吸入第二磁路4A的左侧的端部区域45A,沿第二磁路4A顺时针地行进,从右侧的端部区域45B被吸入第一磁路3A的右侧的端部区域35A。如图2C所示,在第二磁路4A的两侧开放端44A、44B之间,整体上不施加从右侧的开放端44B去往左侧的开放端44A的﹣Y方向的磁场,而施加从左侧的开放端44A去往右侧的开放端44B的﹢Y方向的磁场。即,第二磁路4A顺时针地被磁化,但由于第一磁路3A的影响,在两侧开放端44A、44B之间产生与两侧开放端34A、34B相同方向的磁场。其结果,第二磁敏元件6的输出也为正。
如图2B中以虚线所示,当电流线2A非通电时,即在电流线2A中流动的电流消失时,在第一和第二磁路3、4产生残留磁性。第一和第二磁路3、4的残留磁性的方向与通电时的第一和第二磁路3、4的磁化方向一致。因此,在第一磁路3A的两侧开放端34A、34B之间产生﹢Y方向的磁场,第一磁敏元件5的输出依然为正。与之相对,在第二磁路4A的两侧开放端44A、44B之间产生﹣Y方向的磁场,第二磁敏元件6的输出为负。这是由于,电流线2A产生的磁场的影响消失。即,处于包围电流线2A的第一磁路3A的两侧开放端34A、34B之间的第一磁敏元件5的输出在通电时和非通电时均成为正,而处于位于电流线2A的外部的第二磁路4A的两侧开放端44A、44B之间的第二磁敏元件6的输出在通电时为正,在非通电时为负。这本质上是由于第一磁敏元件5和第二磁敏元件6处于电流线2A的同侧。
如上所述,在非通电时,第一磁敏元件5检测的磁场与第二磁敏元件6检测的磁场的方向(符号)不同。因此,通过求取第一磁敏元件5的输出与第二磁敏元件6的输出之和,能够使由非通电时的第一和第二磁路3、4的剩余磁化引起的磁滞相抵、降低。另一方面,在通电时,第一磁敏元件5检测的磁场与第二磁敏元件6检测的磁场的方向(符号)相同。因此,通过求取第一磁敏元件5的输出与第二磁敏元件6的输出之和,能够提高输出。因此,本实施方式的电流传感器1A能够降低磁滞,并且提高SN比。
图3A~3C表示磁敏元件的位置对磁滞的影响。如图3A所示,使本实施方式的第一和第二磁敏元件5、6的位置在Z方向上变化,求出磁滞的变化。使第一磁敏元件5与第二磁敏元件6的Z方向的间隔一定。在比较例中,如图3B所示,使磁敏元件105的位置在Z方向上变化,求出磁滞的变化。在比较例中,将一个磁敏元件105设置于第一磁敏元件5与第二磁敏元件6之间。磁滞作为(残留磁通密度/检测出磁通密度)×测定最大电流(A)而求出。在图3C中,横轴表示磁敏元件的Z方向位置,纵轴表示磁滞(在本实施方式中,第一磁敏元件5和第二磁敏元件6的Z方向位置的磁滞的合计值)。在本实施方式中,非通电时的第一磁敏元件5的输出与第二磁敏元件6的输出之和在最优位置成为零。在比较例中,非通电时的磁敏元件的输出在最优位置成为零。随着磁敏元件的Z方向位置离开最优位置,残留磁通密度增加,磁滞增加。
在本实施方式中,相对于第一和第二磁敏元件5、6的Z方向位置的变化的磁滞的变化较小。与之相对,在比较例中,相对于磁敏元件105的Z方向位置的变化的磁滞的变化较大。这意味着在本实施方式中,第一和第二磁敏元件5、6的Z方向位置的允许范围较大。在比较例中,限定磁滞较小的范围。因此,为了使残留磁通在设置磁敏元件105的区域中尽可能接近零,需要将第一和第二磁路3、4的形状、位置关系等最优化。与之相对,这种最优化的必要性在本实施方式中较小。而且,在本实施方式中,即使在非通电时的第一磁敏元件5的输出与第二磁敏元件6的输出的绝对值不相同的情况下,通过调整第一放大器8和第二放大器9的增益,也能够容易将第一磁敏元件5的输出和第二磁敏元件6的输出相抵。具体而言,能够设定第一放大器8和第二放大器9的增益,以使得非通电时的第一放大器8的输出与非通电时的第二放大器9的输出的绝对值成为相同程度。在本实施方式中,不需要在决定第一和第二磁路3、4的形状、位置关系等时,将磁滞作为重要的因素进行考虑。在比较例中,像这样这样调整放大器的增益来抑制磁滞,在原理上是不可能的。
作为本实施方式的一个变形例,能够使第一磁敏元件5与第二磁敏元件6的输出的极性彼此不同。具体而言,当施加相同方向的磁场时,使第一磁敏元件5的输出的符号与第二磁敏元件6的输出的符号相反。在霍尔元件的情况下,使施加到第一磁敏元件5和第二磁敏元件6的电流的方向相反即可。由此,能够调换带正电的面和带负电的面,使输出的符号相反。在磁阻效应元件的情况下,使第一磁敏元件5的磁固定层和第二磁敏元件6的磁固定层的磁化方向相反即可。当使第一磁敏元件5或者第二磁敏元件6的输出的极性相反时,第一磁敏元件5的输出的符号与第二磁敏元件6的输出的符号在通电时不同,在非通电时一致。因此,在本变形例中,通过设置减法器等求取第一磁敏元件5的输出与第二磁敏元件6的输出之差的单元,能够得到与上述实施方式同样的效果。
图4A~4C表示本实施方式的另一个变形例。图4A是本变形例的电流传感器1B的立体图,图4B是沿图4A的A-A线的截面图,图4C是沿图4A的B-B线的截面图。第一磁路3A和第二磁路4A沿X方向并排配置。即,第一磁路3A和第二磁路4A处于与X方向正交的彼此不同的Y-Z面内。第一磁路3A包围电流线2A,第二磁路4A处于电流线2A的外部。在本变形例中,第一和第二磁路3、4也与上述实施方式同样地被磁化。如图4A所示,在通电时,磁通从第一磁路3A的端部区域35A在X方向上流向第二磁路4A的端部区域45A,从第二磁路4A的相反侧的端部区域45B在X方向上流向第一磁路3A的端部区域35B。第二磁路4A内的磁通的流动与上述实施方式相同。因此,第二磁路4A的两侧开放端44A、44B之间的磁场在通电时和非通电时朝向相反方向。依照本变形例,能够抑制电流传感器1B的Z方向的尺寸。
图5表示本实施方式的另一个变形例。图5A是本变形例的电流传感器1C的立体图,图5B是沿图5A的A-A线的截面图,图5C是沿图5A的B-B线的截面图。第一磁路3A处于与X方向正交的Y-Z面内,第二磁路4A处于与X方向平行的X-Y面内。第一磁路3A的缺损部33与第二磁路4A的缺损部43相对,因此,第一磁敏元件5和第二磁敏元件6能够搭载于共用的基板7。在本变形例中,第二磁路4A中的磁通的流动也与上述实施方式相同,起到与上述实施方式同样的效果。
图6表示本实施方式的另一个变形例。图6A是本变形例的电流传感器1D的立体图,图6B是沿图6A的A-A线的截面图。第一磁路3A和第二磁路4A处于与电流线2A延伸的方向正交的同一面内。第二磁路4A位于第一磁路3A的内侧。第一磁路3A的缺损部33与第二磁路4A的缺损部43相对,因此第一磁敏元件5和第二磁敏元件6能够搭载于共用的基板7。在本变形例中,第二磁路4A中的磁通的流动也与上述实施方式相同,起到与上述实施方式同样的效果。
图7表示本实施方式的另一个变形例。图7A是本变形例的电流传感器1E的立体图,图7B是沿图7A的A-A线的截面图。在本变形例中,省略了上述实施方式的第一磁路3A的与第二磁路4A相对的长边31B。从X方向观察,第一磁路3A包括:沿Y方向延伸的一个长边31A;和与长边31A的两端连接成直角的、沿Z方向延伸的一对短边32A、32B。两个短边32A、32B的与长边31A相反的一侧的端部形成第一磁路3A的两侧开放端34A、34B。从X方向观察,第二磁路4A与上述实施方式同样具有矩形形状,且具有沿Y方向延伸的一对长边41A、41B和沿Z方向延伸的一对短边42A、42B。在一长边41B的中央部设置有缺损部43,缺损部43的两侧成为开放端44A、44B。在设置第一磁敏元件5和第二磁敏元件6的位置,当电流线2A通电时,由电流线2A感应产生的向右的磁场成为主导。因此,第一磁敏元件5和第二磁敏元件6的输出为正。在非通电时,在设置第一磁敏元件5的位置,由第一磁路3A的剩余磁化引起的向右的磁场占据优势,在设置第二磁敏元件6的位置,由第二磁路4A的剩余磁化引起的向左的磁场占据优势。因此,第一磁敏元件5的输出为正,而第二磁敏元件6的输出为负。因此,在本变形例中,也能够起到与上述实施方式同样的效果。在本变形例中,优选第一磁路3A的两侧开放端34A、34B接近第二磁路4A。由此,在通电时,容易使第一磁路3A与第二磁路4A磁连结。第一磁路3A的开放端34A输出的磁通被第二磁路4A有效地吸入,第二磁路4A输出的磁通被第一磁路3A的开放端34B有效地吸入,容易在第二磁路4A产生剩余磁化。
图8A~8B表示本实施方式的另一个变形例。图8A是本变形例的电流传感器1F的立体图,图8B是沿图8A的A-A线的截面图。本变形例的电流线2B具有圆形截面。第一磁路3B具有沿电流线2B的圆形形状。第二磁路4B具有沿第一磁路3B的两个弧状部46A、46B和将两个弧状部46A、46B的端部彼此连结的两个放射部47A、47B。第一磁路3B和两个弧状部46A、46B与电流线2B同心,弧状部46A位于弧状部46B的内侧。在第一磁路3B设置有缺损部33,在弧状部46A的与缺损部33相对的位置设置有缺损部43。依照该结构,第二磁路4B容易被第一磁路3B磁化。与上述实施方式同样,第二磁路4B在Z方向上与第一磁路3B相邻地设置。本变形例的电流传感器1F与上述实施方式同样地动作。
图9A~9C表示本实施方式的另一个变形例。图9A是本变形例的电流传感器1G的立体图,图9B是沿图9A的A-A线的截面图,图9C是沿图9A的B-B线的截面图。本变形例的电流线2B具有圆形截面。第一磁路3B具有与图8A~8B所示的变形例相同的形状,但第二磁路4B与图8A~8B所示的变形例不同,在弧状部46B设置有缺损部43。此外,第一磁路3B和第二磁路4B处于彼此不同的Y-Z面内。第一磁路3B和第二磁路4B的相对位置关系,与图4A~4C所示的变形例相同。本变形例的电流传感器1G与图4A~4C所示的变形例同样地动作。
(第二实施方式)
图10A是第二实施方式的电流传感器1H的立体图,图10B是沿图10A的A-A线的截面图。图11A概念性地表示电流线2A通电时的施加到电流传感器1的外部磁场,图11B概念性地表示电流线2A非通电时的施加到电流传感器1的外部磁场。第一磁路3A和第二磁路4A具有与第一实施方式相同的形状。第二磁路4A处于第一磁路3A的外侧,第二磁路4A的长边41A与第一磁路3A的长边31A相对。因此,在本实施方式中,第一磁敏元件5和第二磁敏元件6处于电流线2A的彼此相反侧。第一磁敏元件5与第二磁敏元件6的输出的极性相同。
如图11A所示,当电流线2A通电时,在电流线2A的周围形成顺时针的磁通。第一磁路3A与第一实施方式同样地被磁化,第一磁敏元件5的输出为正。第二磁路4A的与第一磁路3A相对的长边41A被由电流线2A感应产生的磁场和来自第一磁路3A的漏磁通在﹣Y方向上磁化,但长边41B几乎未被磁化。对第二磁敏元件6主要施加由电流线2A感应产生的磁场。因此,第二磁敏元件6的输出为负。
如图11B中以虚线所示,当电流线2A非通电时,即在电流线2A中流动的电流消失时,在第一和第二磁路3A、4A产生残留磁性。在第一磁路3A的两侧开放端34A、34B之间产生﹢Y方向的磁场,第一磁敏元件5的输出依然为正。与之相对,第二磁路4A由于长边41A的剩余磁化而被逆时针地磁化,在两侧开放端44A、44B之间产生﹢Y方向的磁场。因此,第二磁敏元件6的输出为正。即,处于包围电流线2A的第一磁路3A的两侧开放端34A、34B之间的第一磁敏元件5中,在通电时和非通电时均被施加﹢Y方向的磁场。与之相对,处于位于电流线2A的外部的第二磁路4A的两侧开放端44A、44B之间的第二磁敏元件6中,通电时的磁场的方向和非通电时的磁场的方向朝向相反方向。
但是,与第一实施方式不同,在非通电时,第一磁敏元件5检测的磁场与第二磁敏元件6检测的磁场的符号一致。与之相对,在通电时,第一磁敏元件5检测的磁场和第二磁敏元件6检测的磁场的方向相反。因此,在本实施方式中,通过用减法器11求取第一磁敏元件5的输出与第二磁敏元件6的输出之差,能够使由非通电时的第一和第二磁路3A、4A的剩余磁化引起的磁滞相抵、降低。由于求取第一磁敏元件5的输出与第二磁敏元件6的输出之差,因此也能够提高电流传感器1H的输出。由此,能够降低磁滞,并且提高SN比。在本实施方式中,也可以如第一实施方式的变形例那样,第一磁敏元件5与第二磁敏元件6的输出的极性彼此不同。在该情况下,电流传感器1H具有求取第一磁敏元件5的输出与第二磁敏元件6的输出之和的器件(加法器10)。
(第三实施方式)
图12A是第三实施方式的电流传感器1J的立体图,图12B是沿图12A的A-A线的截面图,图12C是沿图12A的B-B线的截面图。第一磁路3A与图4A~4C所示的变形例相同。与之相对,第二磁路4A相对于图4A~4C所示的变形例的第二磁路4A,在电流线2A周围旋转90°。随之,第二磁敏元件6相对于图4A~4C所示的变形例的第二磁敏元件6也在电流线2A周围旋转90°。即,第一磁敏元件5和第二磁敏元件6处于电流线2A的周围且彼此偏离大致90°的位置。因此,第一磁敏元件5的感磁方向为Y方向,第二磁敏元件6的感磁方向为Z方向。此外,如图12B、12C所示,在定义了﹢Z方向、﹣Z方向时,第一磁敏元件5的感磁方向的极性在﹢Y方向上为正,第二磁敏元件6的感磁方向的极性在﹣Z方向上为正。即,在﹢Y方向和﹣Z方向上施加相同方向的(图12A中顺时针的)磁场时,第一磁敏元件5的输出和第二磁敏元件6的输出为正。换言之,第一磁敏元件5的输出的极性与第二磁敏元件6的输出的极性在电流线2A周围的磁场方向上相同。
在本实施方式中,在设置第一磁敏元件5和第二磁敏元件6的位置,当电流线2A通电时,由电流线2A感应产生的顺时针的磁场也成为主导。因此,第一磁敏元件5和第二磁敏元件6的输出为正。在非通电时,在设置第一磁敏元件5的位置,由第一磁路3A的剩余磁化引起的向右的(顺时针的)磁场占据优势,在设置第二磁敏元件6的位置,由第二磁路4A的剩余磁化引起的向上的(逆时针的)磁场占据优势。因此,第一磁敏元件5的输出为正,而第二磁敏元件6的输出为负。因此,在本实施方式中,通过设置求取第一磁敏元件5的输出与第二磁敏元件6的输出之和的器件,也能够起到与上述实施方式同样的效果。
相反,在第二磁敏元件6的感磁方向的极性在﹢Z方向上为正的情况下,当电流线2A通电时,第二磁敏元件6的输出为负,在非通电时,第二磁敏元件6的输出为正。第一磁敏元件5与第二磁敏元件6的输出的极性在绕电流线2A的磁场方向上彼此不同。因此,通过设置求取第一磁敏元件5的输出与第二磁敏元件6的输出之差的器件,能够起到与上述实施方式同样的效果。
如以上所说明的那样,本发明的各实施方式及各变形例具有被流过电流线2A(2B)的电流磁化的磁路3A、4A(3B,4B)、第一磁敏元件5和第二磁敏元件6。第一磁敏元件5配置于电流线2A(2B)通电时的磁场与由电流线2A(2B)非通电时的磁路的剩余磁化引起的磁场朝向相同方向的位置。第二磁敏元件6配置于电流线2A(2B)通电时的磁场与收纳电流线2A(2B)非通电时的磁路的剩余磁化引起的磁场朝向相反方向的位置。
详细地展示并说明了本发明的几个优选的实施方式,但要理解为只要不脱离所附的权利要求的主旨或范围就能够进行各种改变和修正。
- 用于电流传感器的传感器组件,具有这样的传感器组件的电流传感器,用于这样的电流传感器的保持器,和组装电流传感器的方法
- 电流传感器和组装电流传感器的方法