一种路面构造深度测量方法、系统、设备及存储介质
文献发布时间:2023-06-19 12:21:13
技术领域
本发明属于道路工程中测量领域,涉及一种路面构造深度测量方法、系统、设备及存储介质。
背景技术
路面抗滑性能直接关系着道路行车安全性。在影响路表抗滑性能的因素中,路面的构造深度作为抗滑性能的重要指标,则非常重要。而随着交通强国建设步伐的加快,智能交通与养护则成为重点课题。大数据与数字图像处理技术也将用于道路检测中,其中数字图像处理是一门交叉前沿学科,其应用领域博大精深,十分广泛,是未来技术向智能化发展的最富有前景,也最富有挑战的一门技术。其在军事、遥感、气象、生物医学,通信工程等大型应用中有着广泛的应用,但在道路检测、养护乃至其他道路工程应用较少。
在现阶段,路面构造深度的检测方法和装置很多,常用的方法人工铺沙法,作为目前在公路交通道路检测领域中对路面构造深度的检测计算最基本的方法,从理论上讲它为最客观、最合理、最正确的方式,但是在实际的操作过程中,其极易受到施工人员水平的影响,影响测试的精确度。
发明内容
本发明的目的在于克服上述现有技术的缺点,提供一种路面构造深度测量方法、系统、设备及存储介质,避免了人为测量的误差,提高了构造深度的测量精度。
为达到上述目的,本发明采用以下技术方案予以实现:
一种路面构造深度测量方法,包括:
S1,对测定路面的铺砂区域进行图像获取;
S2,将路面作为背景,将铺砂区域作为前景,提取背景的样本点和前景的样本点作为训练样本;
S3,采用一次多项式核函数建立向量机并进行图像分割,将背景和前景设为不同标签,对训练样本进行训练和预测,将前景分割出来;
S4,对前景面积和整体面积进行像素点计算,得到铺砂区域的面积;
S5,根据铺砂区域的面积计算得到铺砂区域的路面构造深度。
优选的,采用人工铺砂法进行铺砂,图像获取的范围为350mm×350mm。
优选的,利用ginput函数提取前景和背景样本点。
优选的,S3中,核函数为:
K(x,x
式中:x为输入空间抽取的向量,x
优选的,S3中将前景分割出来后,对于分割出的彩色图转换为灰度图,对图像进行中值滤波区噪声,调节图像自由度,并取其边缘二值图像;分别对边缘二值图像掩膜进行膨胀、填充空洞、清除边缘二值图像。
优选的,铺砂面积S的公式为:
优选的,路面构造深度计算的公式为:
式中:TD
一种路面构造深度测量系统,包括:
图像获取模块,用于对测定路面的铺砂区域进行图像获取;
训练样本提取模块,用于将路面作为背景,将铺砂区域作为前景,提取背景的样本点和前景的样本点作为训练样本;
前景分割模块,用于采用一次多项式核函数建立向量机并进行图像分割,将背景和前景设为不同标签,对训练样本进行训练和预测,将前景分割出来;
铺砂区域的=面积计算模块,用于对前景面积和整体面积进行像素点计算,得到铺砂区域的面积;
路面构造深度计算模块,用于根据铺砂区域的面积计算得到铺砂区域的路面构造深度。
一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述任意一项所述路面构造深度测量方法的步骤。
一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述任意一项所述路面构造深度测量方法的步骤。
与现有技术相比,本发明具有以下有益效果:
本发明选取背景的样本点和前景的样本点作为训练样本进行训练和预测,建立支持向量机进行图像分割,测量精度高。本发明操作简单、测量准确、精度高,解决了传统铺砂不易摊铺成规则圆形,造成测量结果误差较大,进而造成构造深度过大或过小的问题,而且相比于传统量尺测量直径能有效降低的测量误差,提高了测量精度。
附图说明
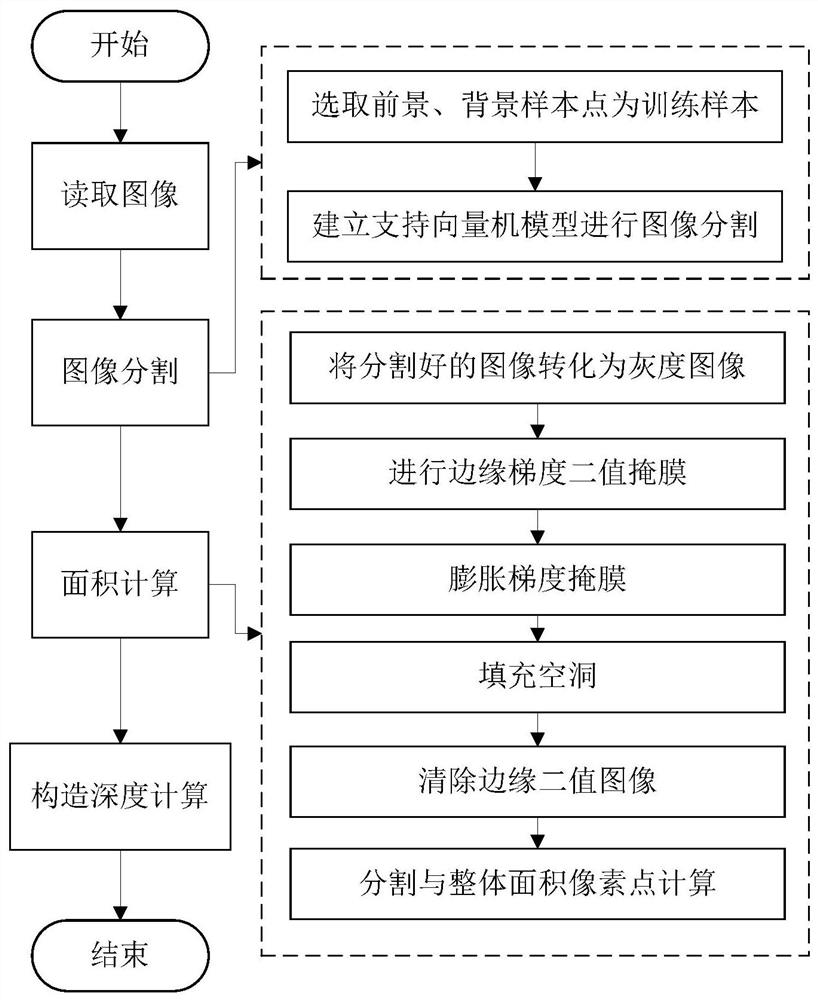
图1是本发明的路面构造深度测量方法的流程示意图;
图2是本发明实例中的手工铺砂法得到的铺砂图;
图3是本发明实例中的背景(路面)的样本点和前景(铺砂区域)的样本点的选取图;
图4是本发明实例中的前景(铺砂区域)分割图像;
图5是本发明实例中的灰度图像;
图6是本发明实例中的边缘梯度二值掩膜图像;
图7是本发明实例中的膨胀梯度掩膜图像;
图8是本发明实例中的填充空洞后的二值图像;
图9是本发明实例中的清除边缘二值图像;
图10是本发明实例中的传统人工铺砂法用量尺测量所构成圆的其中一个方向的直径图像;
图11是本发明实例中的传统人工铺砂法用量尺测量所构成圆的另一个方向的直径图像。
具体实施方式
下面结合附图对本发明做进一步详细描述:
如图1所示,为本发明所述的路面构造深度测量方法,包括如下步骤:
步骤1,对测定路面的铺砂区域进行图像获取,读取获取图像数据。
步骤2,选取背景(路面)的样本点和前景(铺砂区域)的样本点作为训练样本。
步骤3,采用一次多项式核函数建立向量机并进行图像分割,利用上面选取的样本点作为训练样本,将背景(路面)的标签设为0,前景(铺砂区域)的标签设为1,对训练样本进行训练和预测,将前景(铺砂区域)完整分割出来。
步骤4,对于分割出的彩色图转换为灰度图,对图像进行中值滤波区噪声,调节图像自由度。
步骤5,分别对边缘二值掩膜进行膨胀、填充空洞、清除边缘二值图像。
步骤6,分割面积与整体面积像素点的计算,得到该铺砂区域的面积S。
步骤7,计算该测量区域的路面构造深度值。
步骤8,将计算结果与传统人工铺砂法测量结果进行比较。
具体实施过程为:
步骤1,按照《公路路基路面现场测试规程》(JTG 3450-2019)中手工铺砂法测试构造深度方法进行铺砂。对测定路面的铺砂区域进行图像获取,如图2所示,读取获取图像数据;
其中,所获取的图像范围为350mm×350mm。
步骤2,选取背景(路面)的样本点和前景(铺砂区域)的样本点作为训练样本,如图3所示;
其中在Matlab中具体函数为:
TrainData_background=zeros(20,3,′double′);
TrainData_foreground=zeros(20,3,′double′);
步骤3,采用一次多项式核函数建立向量机并进行图像分割,利用上面选取的样本点作为训练样本,将背景(路面)的标签设为0,前景(铺砂区域)的标签设为1,进行训练和预测,将前景(铺砂区域)完整分割出来,如图4所示。
其中,多项式核函数为:K(x,x
式中:x为输入空间抽取的向量,x
其中具体函数为:
TrainLabel=[zeros(length(TrainData_background),1);
ones(length(TrainData_foreground),1)];
TrainData=[TrainData_background;TrainData_foreground];
model=svmtrain(TrainLabel,TrainData,'-t 1-d 1');
PreTrainLabel=svmpredict(TrainLabel,TrainData,model);
TestData=double(reshape(pic,m*n,k));
步骤4,对分割出的彩色图转换为灰度图,如图5所示,对图像进行中值滤波区噪声,调节图像自由度;
步骤5,对图像进行边缘梯度二值掩膜,如图6所示;
其中具体函数为:
BWs=edge(I2,'sobel',threshold*fudgeFactor);
进一步的,进行膨胀梯队掩膜、如图7所示,
其中具体函数为:
BWsdil=imdilate(BWs,[se90 se0]);
进一步的,填充空洞,如图8所示
其中具体函数为:
BWdfill=imfill(BWsdil,'holes');
进一步的,清除边缘二值图像,如图9所示;
其中具体函数为:
BWnobord=imclearborder(BWdfill,4);
步骤6,分割面积与整体面积像素点的计算,根据公式1得到该铺砂区域的面积S。)
步骤7,通过公式2计算该测量区域的路面构造深度值。
所述的公式2中:TD1表示计算的表面构造深度V表示砂的体积(25cm
步骤8,将计算结果与传统人工铺砂法根据公式3测量的结果(如图10和图11所示)进行比较。
所述的公式3中:TD2表示测量表面构造深度,V表示砂的体积(25cm
具体实施例:
步骤1,按照《公路路基路面现场测试规程》(JTG 3450-2019)中手工铺砂法测试构造深度方法进行铺砂。对测定路面的铺砂区域进行图像获取,读取获取图像数据;
步骤2,选取背景(路面)的样本点和前景(铺砂区域)的样本点作为训练样本;
步骤3,采用一次多项式核函数建立向量机并进行图像分割,利用步骤2选取的样本点作为训练样本,将背景(路面)的标签设为0,前景(铺砂区域)的标签设为1,进行训练和预测,将前景(铺砂区域)完整分割出来;
步骤4,对于分割出的彩色图转换为灰度图,对图像进行中值滤波区噪声,调节图像自由度,并取其边缘二值图像;
步骤5,分别对边缘二值掩膜进行膨胀、填充空洞、清除边缘二值图像;
步骤6,分割面积与整体面积像素点的计算,得到该铺砂区域的面积S;
步骤7,计算该测量区域的路面构造深度值;
步骤8,传统人工铺砂法计算的结果D=242mm;
本发明所述的路面构造深度测量系统,包括:
图像获取模块,用于对测定路面的铺砂区域进行图像获取。
训练样本提取模块,用于将路面作为背景,将铺砂区域作为前景,提取背景的样本点和前景的样本点作为训练样本。
前景分割模块,用于采用一次多项式核函数建立向量机并进行图像分割,将背景和前景设为不同标签,对训练样本进行训练和预测,将前景分割出来。
铺砂区域的=面积计算模块,用于对前景面积和整体面积进行像素点计算,得到铺砂区域的面积。
路面构造深度计算模块,用于根据铺砂区域的面积计算得到铺砂区域的路面构造深度。
本发明所述的计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述任意一项所述路面构造深度测量方法的步骤。
本发明所述的计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述任意一项所述路面构造深度测量方法的步骤。
以上内容仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明权利要求书的保护范围之内。
- 一种路面构造深度测量方法、系统、设备及存储介质
- 一种路面纹理构造深度的测量方法与测量系统