声源探测系统及其声源探测方法以及声源探测程序
文献发布时间:2023-06-19 12:22:51
技术领域
本公开涉及声源探测系统及其声源探测方法以及声源探测程序。
背景技术
声源探测是使用构成阵列的传感器来进行的。阵列与作为对象的频率相匹配地配置有传感器。
在阵列中,物理地配置有传感器,因此可对应的频率被限定。在专利文献1中,公开了使阵列中的传感器的配置位置物理地可变的机构。
现有技术文献
专利文献
专利文献1:国际公开第2014/156292号
发明内容
发明要解决的问题
然而,即使在使传感器的配置位置物理地可变的情况下,可对应的频率也会被阵列的可变形态数限定。因此,可能会无法对作为对象的频率作为最优选的阵列配置,进行适当的计测。
因此,寻求一种具有通用性的声源探测系统。
本公开是鉴于这样的情况而完成的,目的在于提供一种在声源探测中能提高通用性的声源探测系统及其声源探测方法以及声源探测程序。
技术方案
本公开的第一方案为一种声源探测系统,具备:多个传感器,以包围空间的方式配置,检测声压和粒子速度;估计部,基于由所述传感器检测出的声压和粒子速度,估计与所述空间内的探测对象的频率相对应的虚拟位置的声压;以及探测部,基于所述虚拟位置的声压,进行与所述频率相对应的声源探测。
本公开的第二方案为一种声源探测系统,具有如下工序:基于由以包围空间的方式配置并检测声压和粒子速度的多个传感器检测出的声压和粒子速度,估计与所述空间内的探测对象的频率相对应的虚拟位置的声压;以及基于所述虚拟位置的声压,进行与所述频率对应的声源探测。
本公开的第三方案为一种声源探测程序,用于使计算机执行如下处理:基于由以包围空间的方式配置并检测声压和粒子速度的多个传感器检测出的声压和粒子速度,估计与所述空间内的探测对象的频率相对应的虚拟位置的声压;以及基于所述虚拟位置的声压,进行与所述频率对应的声源探测。
有益效果
根据本公开,起到在声源探测中能提高通用性的效果。
附图说明
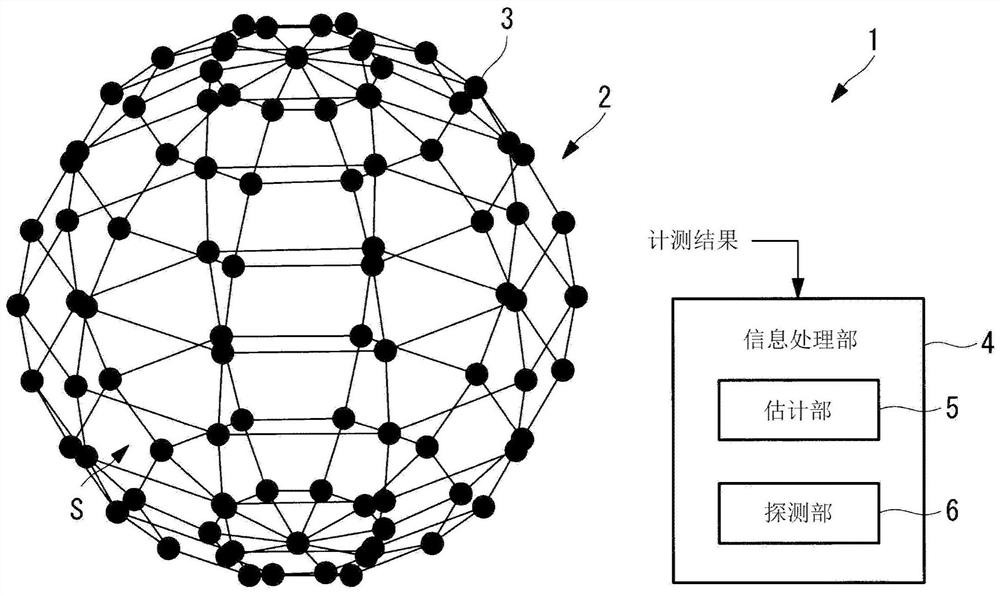
图1是表示本公开的一实施方式的声源探测系统的概略构成的图。
图2是表示本公开的一实施方式的信息处理部的硬件构成的一例的图。
图3是表示本公开的一实施方式的传感器阵列的截面中的声场的图。
图4是表示本公开的一实施方式的传感器阵列的截面中设定虚拟位置的示例的图。
图5是表示本公开的一实施方式的声源可视化的示例的图。
图6是表示本公开的一实施方式的声源探测处理的过程的一例的流程图。
图7是表示本公开的一实施方式的声源探测处理的变形例的过程的一例的流程图。
图8是表示本公开的一实施方式的声源探测处理的变形例的过程的一例的流程图。
具体实施方式
以下,参照附图对本公开的声源探测系统及其声源探测方法以及声源探测程序的一实施方式进行说明。
图1是表示本公开的一实施方式的声源探测系统1的概要构成的图。如图1所示,本实施方式的声源探测系统1具备传感器阵列2、信息处理部4作为主要构成。
传感器阵列具有多个传感器3。传感器3以包围空间S的方式配置。在本实施方式中,以由传感器3包围的空间S为球状的情况为例进行说明。由于由传感器3包围的空间S为封闭空间,因此优选传感器3例如设置4个以上。需要说明的是,关于空间S,并不限定为球状。
配置的各传感器3分别检测声压和粒子速度。声压是配置有传感器3的位置处的声音的压力。粒子速度是配置有传感器3的位置处的声粒子的速度。换言之,粒子速度是空气的振动。此外,如后所述,粒子速度相当于声压梯度。并且,由各传感器3检测出的声压和粒子速度被输出到信息处理部4。
如图1所示,作为传感器阵列2而配置的传感器3以包围规定的空间S的方式配置。传感器3的配置位置、配置密度等不限于图1。
关于作为传感器阵列2配置的传感器3的间隔,优选设定为按作为对象的频率虚拟的波长的1/2左右。具体而言,优选将作为对象的最高频率的波长的1/2设定为传感器3的间隔的最大值。
信息处理部4基于来自传感器3的信息来估计任意位置的声压而进行声源探测。在进行声音探测的情况下,需要计测与作为探测对象的频率对应的位置(间隔)的声压。然而,在直接使用物理地配置的传感器3的计测值的情况下,声压的计测位置被固定,因此能够对应的频率被限定。因此,在信息处理部4中,通过使用配置的传感器3的计测值来估计虚拟的位置(特别是未配置传感器3的位置)的声压,从而与各种频率对应地进行声音探测。
图2是表示本实施方式的信息处理部4的硬件构成的一例的图。
如图2所示,信息处理部4是计算机系统(计算机系统),例如具备:CPU11、用于存储CPU11所执行的程序等的ROM(Read Only Memory:只读存储器)12、作为各程序执行时的工作区域发挥功能的RAM(Random Access Memory:随机存取存储器)13、作为大容量存储装置的硬盘驱动器(HDD)14、用于连接到网络等的通信部15。需要说明的是,作为大容量存储装置,也可以使用固态硬盘(SSD)。这些各部分,经由总线18连接。
此外,信息处理部4也可以具备由键盘、鼠标等构成的输入部、由显示数据的液晶显示装置等构成的显示部等。
需要说明的是,用于存储CPU11所执行的程序等的存储介质不限于ROM12。例如,也可以是磁盘,光磁盘,半导体存储器等的其他辅助存储装置。
用于实现后述的各种功能的一系列处理的过程以程序的形式记录在硬盘驱动器14等中,CPU11将该程序读出到RAM13等,通过执行信息的加工、运算处理来实现后述的各种功能。需要说明的是,程序也可以应用:在ROM12、其他存储介质中预先安装的形态;在计算机可读取的存储介质中存储的状态下提供的形态;经过有线或无线的通信手段发布的形态等。计算机可读取的存储介质是指,磁盘、光磁盘、CD-ROM、DVD-ROM、半导体存储器等。
如图1所示,信息处理部4具备:估计部5、探测部6。
估计部5基于由传感器3检测出的声压和粒子速度,估计与空间S内的探测对象的频率相对应的虚拟位置VP的声压。具体而言,估计部5基于由传感器3检测出的声压和粒子速度,根据基尔霍夫-亥姆霍兹(Kirchhoff-Hehnholtz)的积分定理来估计空间S的内部的声压。
基尔霍夫-亥姆霍兹的积分定理是指,从空间S的边界(空间S的外周面)再现空间S的内部的声场。具体而言,基尔霍夫-亥姆霍兹的积分定理,
由以下的算式(1)记述。
(公式1)
在上述的算式(1)中,Ω表示空间S,
(公式2)
在算式(2)中,k为波数。根据算式(1)和算式(2),能基于传感器位置处的声压p(rs)和声压梯度
这样,由于能再现空间S内部的声场,因此估计部5在空间S内设定与探测对象的频率相对应的虚拟位置VP。虚拟位置VP是指,估计声压的位置。探测对象的频率的声音的感测灵敏度例如取决于感测位置、感测位置的间隔等。因此,关于虚拟位置VP,对于虚拟位置VP的设定数,预先设定配置位置、间隔等,以便能与探索对象的频率对应地适当地进行感测。
需要说明的是,在探测中考虑指向性的情况下,虚拟位置VP优选基于探测对象的频率和探测方向在空间S内设定有多个。通过这样设定虚拟位置VP,能使作为以声源的探测为对象的方向的探测方向具有指向性。具体而言,能提高针对探测方向上的噪声的灵敏度。
例如,虚拟位置VP如图4那样被设定在空间S内。在图4中,是根据任意的频率来设定虚拟位置VP的例子。若这样设定虚拟位置VP,则使用算式(1)来估计与各虚拟位置VP对应的声压。
这样,由于能使用空间S的周围的传感器3的计测结果来获取空间S的内部的任意点的声压,因此通过适当地变更虚拟位置VP,能与各种频率对应地获取声压。
需要说明的是,关于虚拟位置VP,并不限定于频率、探测方向,也可以基于用途等其他因素来设定。
探测部6基于虚拟位置VP的声压,进行与频率对应的声源探测。具体而言,探测部6基于多个虚拟位置VP的声压进行波束成型,从而进行声源探测。通过对到达各虚拟位置VP的各个信号进行延迟等的处理,从而等价地具有非常尖锐的指向性,求出从确定的方向到来的声波的强度。然后,使尖锐的指向性的方向变化,对探测方向上的区域进行扫描来估计声源的位置和强度。当进行声源探测时,探测方向上的区域被扫描,因此该区域内的声源的位置和强度能够可视化。
图5示出了将探测对象设为风扇8,将风扇8相对于传感器阵列2的方向设为探测方向并进行声源探测(声源可视化)的情况的例子。在图5中,将声源的强度表示为4个阶段。在图5的例子中,能将风扇8中的P的位置确定为声源。通过这样进行声源探测,能够确定声源。
然后,参照图6对上述的信息处理部4的声源探测处理的一例进行说明。图6是表示本实施方式的声源探测处理的过程的一例的流程图。图6所示的流程例如在由使用者等进行了声源探测的开始指示的情况下执行。
首先,从各传感器3获取计测结果(S101)。
接着,对在空间S内设定的虚拟位置VP的声压进行再现(S102)。
接着,基于再现的声压,进行声源探测,进行声源可视化(S103)。
需要说明的是,在上述例子中,说明了作为空间S的外周面的声压使用传感器3的计测结果而应用基尔霍夫-亥姆霍兹的积分定理的情况,但也可以使用在外周面上估计的声压分布来应用基尔霍夫-亥姆霍兹的积分定理。例如,在将空间S设为球体状,将传感器3配置在球面上的情况下,也可以基于由传感器3检测出的声压和粒子速度,估计球面上的声压分布,基于球面上的声压分布来估计空间S内的虚拟位置VP的声压。具体而言,通过使用以球谐函数(在球面上的傅里叶变换)为基函数的压缩感测,能根据配置在球面上的传感器3的计测结果来表现(估计)球面上的声压分布。即,球面的声压分布通过球谐函数的叠加来表现。需要说明的是,如果能估计球面上的声压分布,则并不限定于使用以球谐函数为基函数的压缩感测的情况。
在这样的情况下,声源探测处理的流程如图7所示。需要说明的是,对与图6的流程相同的处理标注相同的附图标记。即,在S101之后基于来自各传感器3的计测结果,估计球面上的声压分布(S202)。并且,基于声压分布,再现设定于空间S内的虚拟位置VP的声压(S102)。这样,由此能提高声压的估计精度。即,能将虚拟位置VP的间隔设定得较窄,也能应对更高的频率。
此外,在将空间S设为长方体状,将传感器3配置在长方体上的情况下,也可以基于由传感器3检测出的声压和粒子速度,估计长方体上的声压分布,基于长方体上的声压分布来估计空间S内的虚拟位置VP的声压。具体而言,通过使用以正弦波为基函数的压缩感测,能根据配置在长方体上的传感器3的计测结果来表现(估计)长方体上的声压分布。即,长方体上的声压分布通过波长不同的正弦波的叠加来表现。需要说明的是,只要能估计长方体上的声压分布,则并不限定于使用以正弦波为基函数的压缩感测的情况。
在这样的情况下,声源探测处理的流程如图8所示。需要说明的是,对与图6的流程相同的处理标注相同的附图标记。即,在S101之后基于来自各传感器3的计测结果,估计长方体上的声压分布(S302)。并且,基于声压分布,再现设定于空间S内的虚拟位置VP的声压(S102)。这样,由此能提高声压的估计精度。即,能将虚拟位置VP的间隔设定得较窄,也能应对更高的频率。
如以上说明过的那样,根据本实施方式的声源探测系统及其声源探测方法以及声源探测程序,能够根据由包围空间S的多个传感器3检测出的声压和粒子速度,估计被包围的空间S的内部的声压。即,能够根据作为探测对象的频率来估计在空间S内设定的位置(未配置传感器3的位置)的声压。而且,通过基于虚拟位置VP的声压,能进行针对频率的声源探测。
就是说,能够不进行传感器3的配置位置的变更,而将任意的频率作为探测对象来进行声源探测。换言之,能够虚拟地再现与频率相对应的传感器阵列,进行声源探测。即,在声源探测中能起到提高通用性的效果。
本公开不仅限于上述的实施方式,在不脱离发明的主旨的范围内,能够实施各种变形。
以上说明过的各实施方式所记载的声源探测系统及其声源探测方法以及声源探测程序例如被掌握为如下。
本公开的声源探测系统(1)具备:多个传感器(3),以包围空间(S)的方式配置,检测声压和粒子速度;估计部(5),基于由所述传感器(3)检测出的声压和粒子速度,估计与所述空间(S)内的探测对象的频率相对应的虚拟位置(VP)的声压;以及探测部(6),基于所述虚拟位置(VP)的声压,进行与所述频率相对应的声源探测。
根据本公开的声源探测系统(1),能够根据由包围空间(S)的多个传感器(3)检测出的声压和粒子速度,估计被包围的空间(S)的内部的声压。即,能够根据作为探测对象的频率来估计设定在空间(S)内的位置即虚拟位置(未配置传感器(3)的位置)的声压。而且,通过基于虚拟位置的声压,能进行针对频率的声源探测。就是说,能够不进行传感器(3)的配置位置的变更,而将任意的频率作为探测对象来进行声源探测。换言之,能够虚拟地再现与频率相对应的传感器阵列,进行声源探测。即,在声源探测中能起到提高通用性的效果。
本公开的声源探测系统(1)可以是,所述估计部基于由所述传感器检测出的所述空间的边界处的声压和粒子速度,估计所述空间的内部的声压。
根据本公开的声源探测系统(1),通过基于由传感器检测出的空间的边界(外周面)的声压和粒子速度,能够估计空间的内部的声压。
本公开的声源探测系统(1)也可以是,所述估计部(5)基于由配置在所述空间(S)的周围的所述传感器(3)检测出的声压和粒子速度,根据基尔霍夫-亥姆霍兹的积分定理,估计所述空间(S)的内部的声压。
根据本公开的声源探测系统(1),通过使用基尔霍夫-亥姆霍兹的积分定理,能基于由配置在空间(S)的周围的传感器(3)检测出的声压和粒子速度,估计空间(S)的内部的声压。
本公开的声源探测系统(1)也可以是,基于探测对象的频率和探测方向而在所述空间(S)内设定多个所述虚拟位置(VP)。
根据本公开的声源探测系统(1),通过基于探测对象的频率和探测方向在空间(S)内设定多个虚拟位置(VP),能不变更传感器(3)的配置位置,而与探测对象的频率和探测方向对应地进行声源探测。
本公开的声源探测系统(1)也可以是,所述探测部(6)基于多个所述虚拟位置(VP)的声压进行波束成型,从而进行声源探测。
根据本公开的声源探测系统(1),能通过基于多个虚拟位置(VP)的声压进行波束成型,进行声源探测。
本公开的声源探测系统(1)也可以是,所述传感器(3)配置在球面上,所述估计部(5)基于由所述传感器(3)检测出的声压和粒子速度,估计所述球面上的声压分布,基于所述球面上的声压分布来估计所述空间(S)内的所述虚拟位置(VP)的声压。
根据本公开的声源探测系统(1),在传感器(3)配置在球面上的情况下,能基于由传感器(3)检测出的声压和粒子速度,估计球面上的声压分布。并且,基于由传感器(3)检测出的声压和粒子速度,估计球面上的声压分布,由此能提高声压的估计精度。即,能将虚拟位置(VP)的间隔设定得较窄,也能够应对更高的频率。
本公开的声源探测系统(1)也可以是,所述估计部将球谐函数作为基函数,估计所述球面上的声压分布。
根据本公开的声源探测系统(1),能通过将球谐函数设为基函数,估计球面上的声压分布。
本公开的声源探测系统(1)也可以是,所述传感器(3)配置在长方体上,所述估计部(5)基于由所述传感器(3)检测出的声压和粒子速度,估计所述长方体上的声压分布,基于所述长方体上的声压分布来估计所述空间(S)内的所述虚拟位置(VP)的声压。
根据本公开的声源探测系统(1),在传感器(3)配置在长方体上的情况下,能基于由传感器(3)检测出的声压和粒子速度来估计长方体上的声压分布。并且,能通过基于由传感器(3)检测出的声压和粒子速度来估计长方体上的声压分布,提高声压的估计精度。即,能将虚拟位置(VP)的间隔设定得较窄,也能够应对更高的频率。
本公开的声源探测系统(1)也可以是,所述估计部将正弦波作为基函数,估计所述长方体上的声压分布。
根据本公开的声源探测系统(1),能通过将正弦波设为基函数来估计长方体上的声压分布。
本公开的声源探测方法具有如下工序:基于由以包围空间(S)的方式配置并检测声压和粒子速度的多个传感器(3)检测出的声压和粒子速度,估计与所述空间(S)内的探测对象的频率相对应的虚拟位置(VP)的声压;以及基于所述虚拟位置(VP)的声压,进行与所述频率相对应的声源探测。
本公开的声源探测程序使计算机执行如下处理:基于由以包围空间(S)的方式配置并检测声压和粒子速度的多个传感器(3)检测出的声压和粒子速度,估计与所述空间(S)内的探测对象的频率相对应的虚拟位置(VP)的声压;以及基于所述虚拟位置(VP)的声压,进行与所述频率对应的声源探测。
符号说明
1:声源探测系统
2:传感器阵列
3:传感器
4:信息处理部
5:估计部
6:探测部
8:风扇
11:CPU
12:ROM
13:RAM
14:硬盘驱动器
15:通信部
18:总线
S:空间
VP:虚拟位置
- 声源探测系统及其声源探测方法以及声源探测程序
- 声源探测装置、声源探测方法及非瞬时性记录介质