基于双曲线型铰链结构光纤光栅位移传感器及传感方法
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及位移传感的技术领域,具体涉及基于双曲线型铰链结构光纤光栅位移传感器及传感方法。
背景技术
光纤布拉格光栅(Fiber Bragg Grating)为传感单元的传感技术不断发展,其性能已经受到工程技术领域的认可。与传统电测传感器相比,光纤光栅具有全光无电,绝对测量,高灵敏,无零漂,质量轻、体积小、成本低、抗电磁干扰、抗腐蚀等优异特性。目前国内外光纤光栅位移传感器大致可分为以下几类:弹簧应变式光纤光栅位移传感器,差动悬臂梁式光纤光栅位移传感器,拉绳悬臂梁结构光纤光栅位移传感器,和变形圆环弹性体光纤光栅位移传感器等几类。
1、传统的光纤光栅位移传感器的位移和力学转换装置采用悬臂梁结构(郭永兴等.光学精密工程,2017,25(01);50-58)。其测量原理是在悬臂梁的表面用专用胶粘接光纤布拉格光栅元件,当位移变化引起悬臂梁形变时,解调出光纤光栅的应变值后再通过数学计算得到悬臂梁垂直变形,从而推导出移动的位移。缺点是在悬臂梁的表面很难实现对光纤布拉格光栅的均匀粘贴,而不均匀的光纤光栅粘贴会引起光栅间距的啁啾变形效应,进而影响测量结果的准确性。
2、针对弹簧式的光纤光栅位移传感器(Li Sun1 etal.Journal of AerospaceEngineering.2019,Vol.32(No.1))。由于受悬臂梁结构的位移应变转换量程的限制,弹簧应变式位移传感器的分辨率相对较低,同时将弹簧直接和传感结构进行连接,长期以往传感器弹性系数易改变,导致相同位移时作用到光栅或悬臂梁上的张力改变,测量不准确。
3.采取拉绳式和悬臂梁结构结合的光纤光栅位移传感器(张燕君等.光电工程,2017,44(06):626-632)。其测量原理是采用可调节的拉绳与中心转动轴进行连接进而带动悬臂梁进行位移传感,将拉绳的位移转换为光纤光栅中心波长的漂移,但其额外增加了扭力弹簧、位移转换装置和轴承,加大了传感器的安装难度,同时其使用场景单一。
4、变形圆环弹性体光纤光栅位移传感器(Li etal.22NDINTERNATIONALCONFERENCE ON OPTICAL FIBER SENSORS,PTS 1-3.2012)其解决了悬臂梁结构的啁啾变形问题,其缺点在于无法起到位移放大的作用,无法适用于小量程高分辨率的位移测量应用场合。针对精密仪器位移测量的光纤光栅正弦机构位移传感器,其测量范围太小,仅微米级,无法应用于土木工程、机械装备的应用工况。
发明内容
本发明的目的提供基于双曲线型铰链结构光纤光栅位移传感器及传感方法,解决上述现有技术问题中的一个或者多个。
一方面,根据本发明提供的基于双曲线型铰链结构光纤光栅位移传感器包括底座、铅封螺钉、弹簧、拉杆以及上述双曲线型铰链结构,该双曲线型铰链结构安装于所述底座的容纳腔内,所述第二固定杆的第二螺纹固定孔内安装有所述铅封螺钉,所述拉杆和弹簧均设于所述底座的容纳腔内,所述弹簧的一端与所述铅封螺钉连接,所述弹簧的另一端与所述拉杆连接,其中,双曲线型铰链结构,包括:第一曲面构件、第二曲面构件、光纤光栅元件,所述第一曲面构件的凸面和所述第二曲面构件的凸面相向设置,所述第一曲面构件的曲率半径和所述第二曲面构件的曲率半径相同,所述第一曲面构件中间位置设有第一光纤固定孔,所述第二曲面构件中间位置设有第二光纤固定孔,所述第二光纤固定孔和所述第一光纤固定孔在竖直方向对齐,所述光纤光栅的一端安装于所述第一光纤固定孔,另一端安装于所述第二光纤固定孔。
在一些实施方式中,双曲线型铰链结构还包括平行设置的第一固定杆和第二固定杆,所述第一固定杆分别与所述第一曲面构件和第二曲面构件的一端固定连接,所述第二固定杆分别与所述第一曲面构件的和第二曲面构件远离所述第一固定杆的一端固定连接,所述第一固定杆设有第一螺纹固定孔,所述第二固定杆设有第二螺纹固定孔。
在一些实施方式中,第一曲面构件为双曲面簧片,所述第二曲面构件为双曲面簧片。
在一些实施方式中,光纤光栅为光纤布拉格光栅。
在一些实施方式中,光纤光栅的一端粘接于所述第一光纤固定孔,另一端粘接于所述第二光纤固定孔。
在一些实施方式中,所述底座上端面和下端面分别设有第一通孔和第二通孔,所述第一通孔、第一光纤固定孔、第二光纤固定孔以及第二通孔位于同一直线。
在一些实施方式中,所述第一曲面构件包括第一端部和第二端部,所述第一端部和所述第一光纤固定孔的连线与所述第一端部和第二端部的连线的夹角为α,所述第二曲面构件包括第三端部和第四端部,所述第三端部和所述第二光纤固定孔的连线与所述第三端部和所述第四端部的连线的夹角为α,α的角度为12至15°。
另一方面,根据本发明提供的基于双曲线型铰链结构光纤光栅位移传感器的传感方法,包括
在水平方向上,使得拉杆(80)与待测物体硬质接触,固定传感器;
标定传感器,得到竖直方向上的位移B;
测量时,待测物体的微位移量按以下公式获得:
其中,A为水平方向上的位移,X为位移放大倍数;
其中,
其中,α为所述第一曲面构件的第一端部和所述第一光纤固定孔的连线与所述第一曲面构件的所述第一端部和第二端部的连线的夹角,Δα为所述拉杆与待测物体硬质接触角度α产生的微小变化。
在一些实施方式中,X按以下公式获得:
在一些实施方式中,α的角度为12至15°,水平方向上的位移A为竖直方向上的位移B的4倍。
有益效果:
1、通过双曲线型机械位移放大结构可以将水平方向上的位移在竖直方向上放大四倍左右,从而可以有效增加位移探测的灵敏度。
2、双曲线型铰链结构采用的是两点式粘贴方法粘贴光纤布拉格光栅,使光纤光栅元件悬空,避免了不均匀的受力所带来的啁啾效应,减少对实验结果的不良影响,增加了测量结构的精度。
3、光纤光栅安装在双曲线型铰链结构中心位置,仿真结果得知中心位置位移放大倍数最大,提高光纤光栅位移传感器的灵敏度。
附图说明
图1为本发明的一种双曲线型铰链结构的示意图;
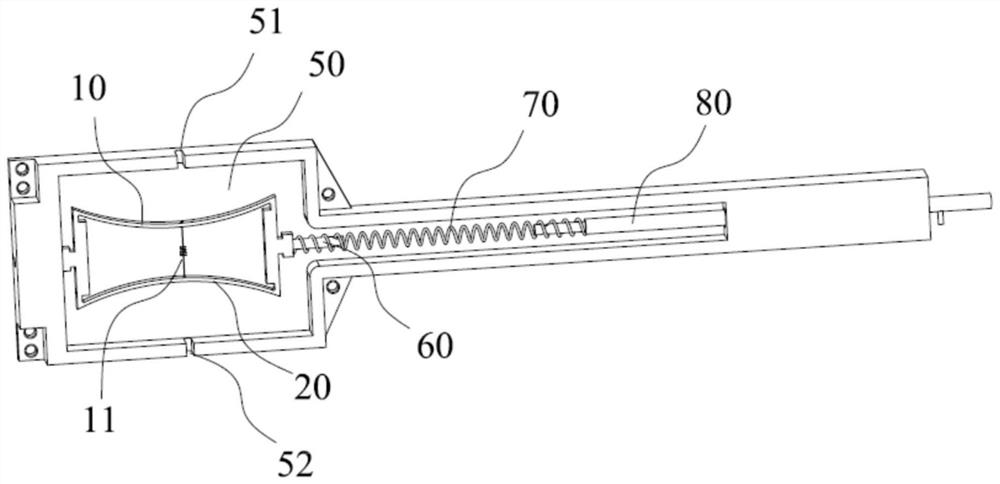
图2为本发明的一种光纤光栅位移传感器的结构示意图;
图3为本发明的三角形放大原理图;
图4为本发明的一种光纤光栅位移传感器的三角形放大示意图;
图5为本发明的一种双曲线型铰链结构纵向拉伸仿真图;
图6为本发明的一种光纤光栅传感器纵向位移与拉力呈线性关系。
具体实施方式
下面结合说明书附图1至6,对本发明进行进一步详细的说明。
如图1和2所示:
一种光纤光栅位移传感器,包括底座50、铅封螺钉60、弹簧70、拉杆80以及双曲线型铰链结构,该双曲线型铰链结构安装于所述底座50的容纳腔内,所述第二固定杆40的第二螺纹固定孔41内安装有所述铅封螺钉60,所述拉杆80和弹簧70均设于所述底座50的容纳腔内,所述弹簧70的一端与所述铅封螺钉60连接,所述弹簧70的另一端与所述拉杆80连接,其中,双曲线型铰链结构,包括:第一曲面构件10、第二曲面构件20、光纤光栅11以及平行设置的第一固定杆30和第二固定杆40,所述第一曲面构件10的凸面和所述第二曲面构件20的凸面相向设置,所述第一曲面构件10的曲率半径和所述第二曲面构件20的曲率半径相同,所述第一曲面构件10设有第一光纤固定孔12,所述第二曲面构件20设有第二光纤固定孔22,所述第二光纤固定孔22和所述第一光纤固定孔12在竖直方向对齐,所述光纤光栅11的一端安装于所述第一光纤固定孔12,另一端安装于所述第二光纤固定孔22;
所述第一固定杆30分别与所述第一曲面构件10和第二曲面构件20的一端固定连接,所述第二固定杆40分别与所述第一曲面构件10的和第二曲面构件20远离所述第一固定杆30的一端固定连接,所述第一固定杆30设有第一螺纹固定孔31,所述第二固定杆40设有第二螺纹固定孔41。
进一步的,第一曲面构件10为双曲面簧片,所述第二曲面构件20为双曲面簧片。
进一步的,光纤光栅11为光纤布拉格光栅。
进一步的,光纤光栅11的一端粘接于所述第一光纤固定孔12,另一端粘接于所述第二光纤固定孔22。具体的,光纤光栅11通过光学胶分别粘接于第一光纤固定孔12和第二光纤固定孔22。
进一步的,所述底座50上端面和下端面分别设有第一通孔51和第二通孔52,所述第一通孔51、第一光纤固定孔12、第二光纤固定孔22以及第二通孔52位于同一直线。
当拉杆80感知外部的某个位移而受压时,拉杆80推动抵接于铅封螺钉60的弹簧70受压压缩,铅封螺钉60不断伸入底座50的容纳腔内,铅封螺钉60对双曲面簧片施加位移使得双曲面簧片产生弯曲而变形,这样对称粘贴在双曲面簧片上下表面的光纤光栅和双曲面簧片的表面产生协同变形,使得光纤光栅的中心波长由于应变而产生一定的偏移,通过分析可以得到光纤光栅的中心波长和位移之间的关系,从而实现对位移的检测。
本申请创造性的使用双曲面簧片代替了现有梁结构,通过三角形放大原理的能对微小位移进行机械放大,如图3所示:
当长度l不变时,水平方向形成一个位移A时,在竖直方向上就会形成一个位移B,设位移放大倍数为X,则有:
水平位移A除了会引起竖直方向位移B的变化之外,还使角度α产生微小变化Δα,由此可得:
A=Lcosα-lcos(α+Δα)
B=lsin(α+Δα)-lsinα
联立可得
本申请所设计的传感器只针对微小的位移量就行测量,通常被测位移十分微小,所以角度α的增量Δα也十分微小,所以计算时可将α+Δα等价于α。由此可推出:
如图4所示,α的角度约12至15°,因此,根据公式推导,通过双曲面位移放大结构可以将水平方向上的位移在竖直方向上放大四倍左右,从而可以有效增加位移探测的灵敏度。
通过仿真实验进行验证:
按照所设计的双曲线型铰链结构弹性体的具体机械尺寸,用SolidWorks绘制3D效果图,建立传感器数值仿真模型。将仿真模型导入COMSOL,定义模型的弹簧钢材料属性,杨氏模量为2.1×10
逐步施加5-50N,不同的拉力得出相应的机械位移放大数值,采集位移数据分析拉力与机械形变的对应关系,为传感器的结构尺寸设计提供依据。
数据如表1所示:
表1拉力与横向和纵向位移关系表
由图6可知,传感器纵向位移与拉力呈线性关系,其相关系数R
本申请的另一创造性点在于:双曲面结构采用的是两点式粘贴方法粘贴光纤布拉格光栅,使光纤光栅元件悬空,避免了不均匀的受力所带来的啁啾效应,减少对实验结果的不良影响,增加了测量结构的精度。
根据双曲线型铰链结构的纵向拉伸仿真图5和双曲线型铰链结构的横向拉伸仿真图6可知,应将光纤光栅安装于传感结构的中心区域,使栅区处于弹性体的几何中心,根据传感器的量程施加一定的预应力,用光学胶,比如UV胶将光纤光栅分别与第一曲面构件和第二曲面构件粘结在一起。
以上仅是本发明的优选方式,应当指出,对于本领域普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干相似的变形和改进,这些也应视为本发明的保护范围之内。
- 基于双曲线型铰链结构光纤光栅位移传感器及传感方法
- 基于光纤光栅传感的位移传感器及位移监测装置