一种骨科用医疗器械振动式清洗装置
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及一种清洗装置,尤其涉及一种骨科用医疗器械振动式清洗装置。
背景技术
骨科用的医疗器械有手术刀、手术剪刀、手术镊子和手术钳子等,这些器材都是可以重复使用的,使用之后必须进行消毒清洗,才可二次使用。
传统的骨科用的医疗器械,在人们使用之后,都是人工带上手套对其进行消毒清洗,极其不方便,随着医学科技的不断发展,目前,现有的骨科用医疗器械清洗设备,通常都是将消毒水倒进在消毒箱内或消毒盒内,然后把医疗器械放置在消毒箱内或消毒盒内浸泡,医疗器械在消毒水中浸泡不动,会使一些医疗器械上粘着的污垢或细菌,无法从医疗器械上分离出去,清洗不够全面,且浸泡时间较长,使得人们的工作效率大幅度降低等问题存在。
综上所述,需要设计一种具有提醒功能、且震动式清洁效果较好的骨科用医疗器械振动式清洗装置,以解决上述的问题。
发明内容
为了克服现有的骨科用医疗器械清洗设备,把医疗器械放置在消毒箱内或消毒盒内浸泡,医疗器械在消毒水中浸泡不动,会使一些医疗器械上粘着的污垢或细菌,无法从医疗器械上分离出去,清洗不够全面的缺点,本发明的目的是提供一种具有提醒功能、且震动式清洁效果较好的骨科用医疗器械振动式清洗装置。
技术方案为:一种骨科用医疗器械振动式清洗装置,包括有:底座和支柱,底座顶部中间设有支柱;距离传感器,支柱上安装有距离传感器;储存盒,支柱外侧上间隔均匀设有三个储存盒,储存盒位于距离传感器上方;震动机构,储存盒内侧均设有震动机构;装料机构,支柱中部设有装料机构,装料机构位于储存盒一侧。
作为上述方案的改进,震动机构包括有:支撑块,储存盒内侧均间隔均匀设有六个支撑块;垫网,储存盒内侧均设有垫网,垫网均位于支撑块一侧;导杆,储存盒内侧均对称设有导杆;振片,导杆之间均滑动式设有振片;第一弹簧,导杆与振片之间均设有第一弹簧,第一弹簧均套在导杆上;电动推杆,储存盒内侧均设有电动推杆,电动推杆的伸缩杆均与振片连接。
作为上述方案的改进,装料机构包括有:定位块,支柱一侧间隔均匀设有三个定位块;第一连接环,支柱中部滑动式设有第一连接环;装料篮,第一连接环一侧间隔均匀设有三个装料篮,装料篮均与储存盒配合;第二弹簧,其中一个定位块与第一连接环之间设有第二弹簧,第二弹簧套在支柱上;位移杆,第一连接环底部间隔均匀设有六个位移杆。
作为上述方案的改进,还包括有旋转机构,旋转机构包括有:第一弧形楔形块,装料篮顶部均设有第一弧形楔形块;第二连接环,支柱一侧转动式设有第二连接环;连接板,第二连接环外侧之间设有连接板,连接板内侧间隔均匀开有三个定位孔;第二弧形楔形块,连接板底部外侧间隔均匀设有三个第二弧形楔形块,第二楔形块均与第一弧形楔形块配合;涡卷弹簧,第二连接环与支柱之间设有涡卷弹簧,涡卷弹簧套在支柱上。
作为上述方案的改进,还包括有限位机构,限位机构包括有:第三连接环,支柱外部一侧设有第三连接环;定位杆,第三连接环外侧间隔均匀滑动式设有三个定位杆;卡位块,定位杆底部均设有卡位块,卡位块均与定位孔配合;滑套,第三连接环外侧间隔均匀设有三个滑套;滑杆,滑套内侧均滑动式设有滑杆;第三弹簧,滑杆与滑套之间均设有第三弹簧,第三弹簧均套在滑杆上。
作为上述方案的改进,还包括有固定机构,固定机构包括有:固定杆,底座内侧周围间隔均匀设有五个固定杆;直筒吸盘,固定杆内侧均滑动式设有直筒吸盘;排气孔,直筒吸盘外侧均设有排气孔;导向柱,底座顶部间隔均匀设有五个导向柱;按压环,导向柱顶部之间滑动式设有按压环,按压环与直筒吸盘连接;第四弹簧,按压环与导向柱之间均设有第四弹簧,第四弹簧均套在导向柱上。
作为上述方案的改进,还包括有响铃机构,响铃机构包括有:感应棒,连接板顶部间隔均匀设有三个感应棒;金属软管,第三连接环外侧间隔均匀设有三个金属软管;铃铛,金属软管上均设有铃铛。
作为上述方案的改进,还包括有控制箱和控制器,支柱顶部设有控制箱,控制箱内安装有开关电源、电源模块和控制模块,开关电源为整个装置供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块与电源模块通过电性连接,支柱上侧安装有控制器,控制器位于控制箱下侧,控制器上设有设置键、加一键、减一键和确认键;控制模块上连接有DS1302时钟电路和24C02电路;设置键、加一键、减一键、确认键和距离感应器都与控制模块通过电性连接,电动推杆与控制模块通过外围电路连接。
与现有技术相比,本发明具有如下优点:1、本发明通过人们将定位杆向下移动,带动卡位块向下移动至定位孔内,这时人们松开滑杆,在第三弹簧的作用下,带动滑杆向外移动,使得滑杆卡在定位杆的通孔上,在卡位块的作用将连接板固定住,不需人们一直将连接板固定住,有效减轻人们的劳动强度。
2、通过排气孔向下移动至底座内,底座将排气孔堵住,空气则不能从排气孔进入到直筒吸盘内,使得直筒吸盘向下移动与桌面或平面接触时,直筒吸盘将桌面或平面吸住,为医疗器械在清洗工作时增加了稳定性。
3、通过连接板顺时针旋转时,带动感应棒顺时针旋转,使得感应棒与铃铛接触,在感应棒的作用下,这时铃铛发出第一次声音,提醒人们医疗器械在进行清洗工作,提醒效果较好,提高人们的工作效率。
附图说明
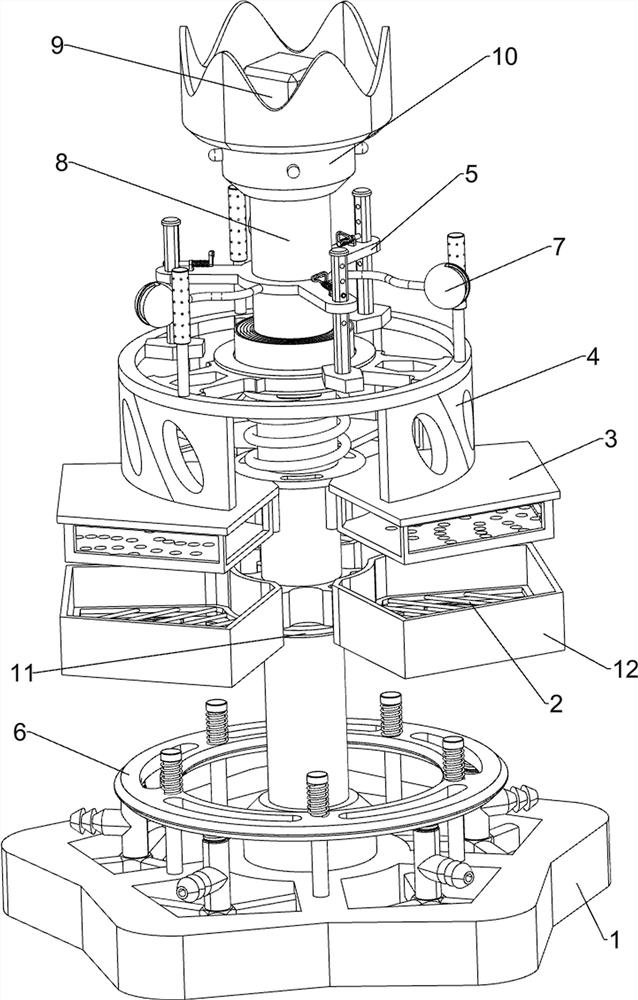
图1为本发明的立体结构示意图。
图2为本发明第一部分的立体结构示意图。
图3为本发明第二部分的立体结构示意图。
图4为本发明第三部分的立体结构示意图。
图5为本发明第四部分的立体结构示意图。
图6为本发明第五部分的立体结构示意图。
图7为本发明第六部分的立体结构示意图。
图8为本发明电路一部分的结构示意图。
图9为本发明电路另一部分的结构示意图。
图中标号名称:1-底座,8-支柱,9-控制箱,10-控制器,11-距离传感器,12-储存盒,2-震动机构,21-支撑块,22-垫网,23-导杆,24-振片,25-第一弹簧,26-电动推杆,3-装料机构,31-定位块,32-第一连接环,33-装料篮,34-第二弹簧,35-位移杆,4-旋转机构,41-第一弧形楔形块,42-第二连接环,43-连接板,44-定位孔,45-第二弧形楔形块,46-涡卷弹簧,5-限位机构,51-第三连接环,52-定位杆,53-卡位块,54-滑套,55-滑杆,56-第三弹簧,6-固定机构,61-固定杆,62-直筒吸盘,63-排气孔,64-导向柱,65-按压环,66-第四弹簧,7-响铃机构,71-感应棒,72-金属软管,73-铃铛。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
一种骨科用医疗器械振动式清洗装置,如图1、图2和图3所示,包括有底座1、支柱8、距离传感器11、储存盒12、震动机构2和装料机构3,底座1顶部中间设有支柱8,支柱8上安装有距离传感器11,支柱8外侧上间隔均匀设有三个储存盒12,储存盒12内侧均设有震动机构2,支柱8中部设有装料机构3,装料机构3位于储存盒12上侧。
震动机构2包括有支撑块21、垫网22、导杆23、振片24、第一弹簧25和电动推杆26,储存盒12内侧均间隔均匀设有六个支撑块21,储存盒12内侧均设有垫网22,垫网22均位于支撑块21上侧,储存盒12内侧均对称设有导杆23,导杆23之间均滑动式设有振片24,导杆23与振片24之间均设有第一弹簧25,第一弹簧25均套在导杆23上,储存盒12内侧均设有电动推杆26,电动推杆26的伸缩杆均与振片24连接。
装料机构3包括有定位块31、第一连接环32、装料篮33、第二弹簧34和位移杆35,支柱8上侧间隔均匀设有三个定位块31,支柱8中部滑动式设有第一连接环32,第一连接环32外侧间隔均匀设有三个装料篮33,装料篮33均与储存盒12配合,其中一个定位块31与第一连接环32之间设有第二弹簧34,第二弹簧34套在支柱8上,第一连接环32底部间隔均匀设有六个位移杆35。
当人们需要对骨科用的医疗器械进行清洗时,人们将水倒进储存盒12内,然后按下电源总开关,给本装置上电,控制模块控制距离传感器11工作,人们将医疗器械放置在装料篮33内,然后人们将装料篮33向下移动,带动移位杆向下移动,第二弹簧34被拉伸,距离传感器11可对装料篮33和距离传感器11之间的距离进行检测,装料篮33向下移动至储存盒12内的垫网22上后,当距离传感器11检测到的距离小于控制模块中的额定值时,距离传感器11发出信号,控制模块接收信号后控制电动推杆26伸长和缩短固定的时间后自动停止,带动振片24来回移动,在第一弹簧25的作用下,使得振片24在来回移动时,使振片24将水推动至水波纹形状,能更好对医疗器械进行清洗工作,当需要对医疗器械进行加速清洗时,人们按下设置键,设置键发出信号,控制模块接收信号后控制加一键和减一键,这时人们按下加一键,加一键发出信号,控制模块接收信号后控制电动推杆26不断的加速伸长和缩短,使得振片24不断加速来回移动,然后人们按下确认键,确认键发出信号,控制模块接收信号后控制电动推杆26保持加速工作,当医疗器械需要缓慢清洗时,人们再次按下设置键,设置键发出信号,控制模块接收信号后控制加一键和减一键,这时人们按下减一键,减一键发出信号,控制模块接收信号后控制电动推杆26缓慢的伸长和缩短,然后人们按下确认键,确认键发出信号,控制模块接收信号后控制电动推杆26保持缓慢工作,当医疗器械清洗完毕后,人们松开装料篮33,在第二弹簧34的作用下,带动装料篮33和移位杆向上移动,装料篮33远离储存盒12后,当距离传感器11检测到的距离大于控制模块中的额定值时,距离传感器11发出信号,控制模块接收信号后控制电动推杆26完全停止工作。
实施例2
在实施例1的基础之上,如图4、图5、图6和图7所示,还包括有旋转机构4,旋转机构4包括有第一弧形楔形块41、第二连接环42、连接板43、第二弧形楔形块45和涡卷弹簧46,装料篮33顶部均设有第一弧形楔形块41,支柱8上侧转动式设有第二连接环42,第二连接环42外侧之间设有连接板43,连接板43内侧间隔均匀开有三个定位孔44,连接板43底部外侧间隔均匀设有三个第二弧形楔形块45,第二楔形块均与第一弧形楔形块41配合,第二连接环42与支柱8之间设有涡卷弹簧46,涡卷弹簧46套在支柱8上。
当人们需要将装料篮33向下移动时,人们手动将连接板43顺时针旋转,从而带动第二连接环42和第二弧形楔形块45顺时针旋转,进而使得涡卷弹簧46发生形变,第二弧形楔形块45旋转的作用,带动第一弧形楔形块41和装料篮33向下移动,之后继续转动涡卷弹簧46,此时不会带动第二连接环42和第二弧形楔形块45转动,当人们松开连接板43后,在涡卷弹簧46缓慢的复位作用下,带动第二连接环42和第二弧形楔形块45缓慢地逆时针旋转复位,在第二弹簧34的作用,带动装料篮33和第一弧形楔形块41向上移动复位。
还包括有限位机构5,限位机构5包括有第三连接环51、定位杆52、卡位块53、滑套54、滑杆55和第三弹簧56,支柱8上部外侧设有第三连接环51,第三连接环51外侧间隔均匀滑动式设有三个定位杆52,定位杆52内侧均匀间隔开有多个通孔,定位杆52底部均设有卡位块53,卡位块53均与定位孔44配合,第三连接环51外侧间隔均匀设有三个滑套54,滑套54内侧均滑动式设有滑杆55,滑杆55与滑套54之间均设有第三弹簧56,第三弹簧56均套在滑杆55上。
当定位孔44顺时针旋转至卡位块53下方时,人们将滑杆55向内移动,第三弹簧56被拉伸,使得滑杆55不再卡在定位杆52的通孔上,然后人们将定位杆52向下移动,带动卡位块53向下移动至定位孔44内,这时人们松开滑杆55,在第三弹簧56的作用下,带动滑杆55向外移动,使得滑杆55卡在定位杆52的通孔上,在卡位块53的作用将连接板43固定住,当医疗器械清洗完成后,人们再次将滑杆55向内移动,使滑杆55脱离定位杆52,然后人们将定位杆52向上移动,带动卡位块53向上移动脱离定位孔44,此时人们松开滑杆55,在第三弹簧56的作用,使得滑杆55向外移动卡在定位杆52上,这时连接板43不再被固定住。
还包括有固定机构6,固定机构6包括有固定杆61、直筒吸盘62、排气孔63、导向柱64、按压环65和第四弹簧66,底座1内侧周围间隔均匀设有五个固定杆61,固定杆61内侧均滑动式设有直筒吸盘62,直筒吸盘62外侧均设有排气孔63,底座1顶部间隔均匀设有五个导向柱64,导向柱64顶部之间滑动式设有按压环65,按压环65与直筒吸盘62连接,按压环65与导向柱64之间均设有第四弹簧66,第四弹簧66均套在导向柱64上。
当人们将本装置移动至桌面或平面上时,人们手动将按压环65向下移动,带动直筒吸盘62和排气孔63向下移动,第四弹簧66被拉伸,排气孔63向下移动至底座1内,底座1将排气孔63堵住,空气则不能从排气孔63进入到直筒吸盘62内,使得直筒吸盘62向下移动与桌面或平面接触时,直筒吸盘62将桌面或平面吸住,当人们需要将本装置移动至其他工作场所时,人们将排气孔63向上移动脱离底座1,使得空气经过排气孔63进入到直筒吸盘62内,这时直筒吸盘62不再吸住桌面或平面,在第四弹簧66的作用下,带动直筒吸盘62、排气孔63和按压环65向上移动复位。
还包括有响铃机构7,响铃机构7包括有感应棒71、金属软管72和铃铛73,连接板43顶部间隔均匀设有三个感应棒71,第三连接环51外侧间隔均匀设有三个金属软管72,金属软管72上均设有铃铛73。
当连接板43顺时针旋转时,带动感应棒71顺时针旋转,使得感应棒71与铃铛73接触,在感应棒71的作用下,这时铃铛73发出第一次声音,提醒人们医疗器械在进行清洗工作,当连接板43逆时针旋转时,带动感应棒71逆时针旋转与铃铛73再次接触,从而使得铃铛73发出第二次声音,提醒人们医疗器械已清洗完毕。
还包括有控制箱9和控制器10,如图1、图8和图9所示,支柱8顶部设有控制箱9,控制箱9内安装有开关电源、电源模块和控制模块,开关电源为整个装置供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块与电源模块通过电性连接,支柱8上侧安装有控制器10,控制器10位于控制箱9下侧,控制器10上设有设置键、加一键、减一键和确认键;控制模块上连接有DS1302时钟电路和24C02电路;设置键、加一键、减一键、确认键和距离感应器都与控制模块通过电性连接,电动推杆26与控制模块通过外围电路连接。
以上所述仅为本发明的实施例子而已,并不用于限制本发明。凡在本发明的原则之内,所作的等同替换,均应包含在本发明的保护范围之内。本发明未作详细阐述的内容属于本专业领域技术人员公知的已有技术。
- 一种骨科用医疗器械振动式清洗装置
- 一种振动式医疗器械清洗装置