隐形防护网的控制系统及其控制方法
文献发布时间:2023-06-19 12:24:27
技术领域
本发明涉及一种物联网领域,尤其涉及一种隐形防护网的控制系统及其控制方法。
背景技术
隐形防护网是一种安装于窗户、阳台等处,具有防护、防盗、防坠物功能的安居产品。通过控制隐形防护网的收卷或展开,可实现最大限度地减少人们对外界瞭望的影响,以提高用户的体验感。但是现有的隐形防护网需现场控制收卷或展开,难以实现远程管理和控制,在外则无法确认关闭与否,所以容易出现忘记收卷关闭而导致防护、防盗失效的情况。
发明内容
本发明的目的在于提出一种隐形防护网的控制系统,包括驱动电机和与所述驱动电机电连接以控制所述驱动电机的转动的控制器。
所述隐形防护网的控制系统还包括移动终端、服务器和智能网关;所述服务器分别与移动终端和智能网关建立无线通信连接,以使服务器接收移动终端的控制指令并发送给智能网关;所述智能网关与控制器建立有线或无线通信连接,以将移动终端的控制指令转发给控制器。
本发明的另一目的在于提出一种隐形防护网的控制方法,包括以下步骤:
S1,移动终端输入控制命令。
S2,服务器接收移动终端的控制指令并发送给智能网关。
S3,智能网关将移动终端的控制指令转发给控制器。
S4,控制器按移动终端的控制指令控制驱动电机转动,收卷或展开隐形防护网。
本发明的隐形防护网控制系统可通过移动终端输入控制命令,并由服务器和智能网关传输控制命令至控制器,该控制器按移动终端的控制指令控制驱动电机转动,收卷或展开隐形防护网。可对现场忘记关闭隐形防护网的情况远程控制其关闭进行补救;也可在回家前提前打开隐形防护网,加快空气流通;实现对隐形防护网的远程管理和控制。
附图说明
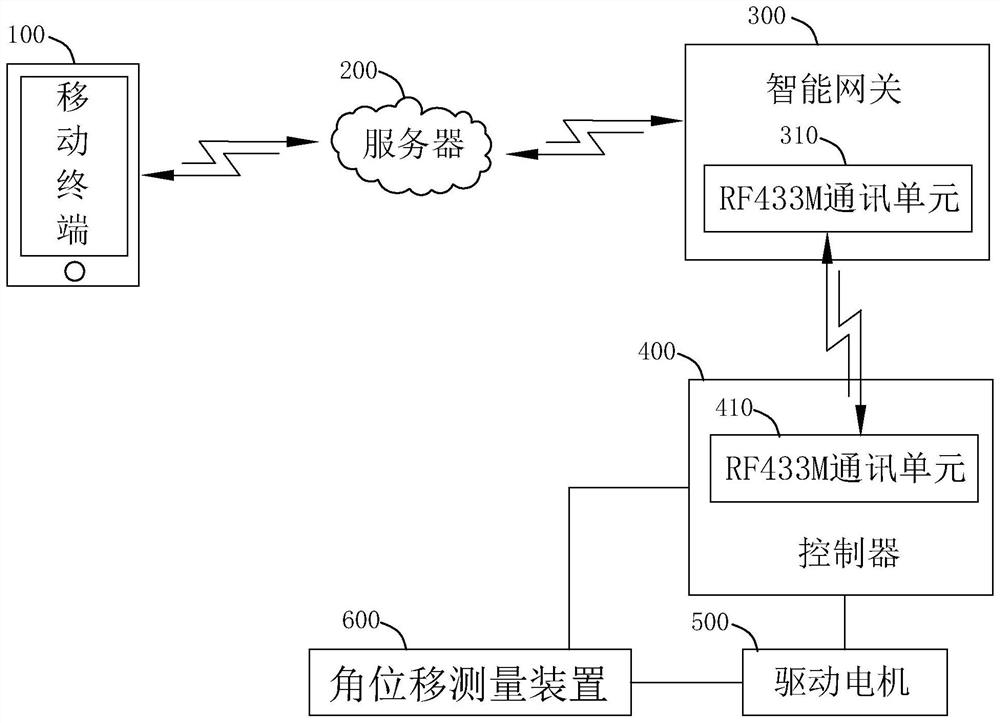
图1为本发明的隐形防护网的控制系统的结构示意图。
图2为本发明的控制器的控制原理图。
图3为本发明的隐形防护网的控制方法的控制流程示意图。
具体实施方式
如下结合附图,对本申请方案作进一步描述:
实施例一
参见附图1-2,一种隐形防护网的控制系统,包括网帘本体、用于驱动网帘本体收卷或者展开的驱动电机500和与所述驱动电机500电连接以控制所述驱动电机500的转动的控制器400。
所述隐形防护网的控制系统还包括移动终端100、服务器200和智能网关300。所述服务器200分别与移动终端100和智能网关300建立无线通信连接,以使服务器200接收移动终端100的控制指令并发送给智能网关300。所述智能网关300与控制器400建立有线或无线通信连接,以将移动终端100的控制指令转发给控制器400。所述服务器200为云端服务器。所述控制器400包括RF433M通讯单元410,所述智能网关300设置有RF433M通讯单元310;智能网关300与控制器400通过各自的RF433M通讯单元310,410建立无线通信连接。
本技术方案可对现场忘记关闭隐形防护网的情况远程控制其关闭进行补救;也可在回家前提前打开隐形防护网,加快空气流通;实现对隐形防护网的远程管理和控制。
所述控制器400包括电机工作状态判断单元420,所述电机工作状态判断单元420包括:
电流获取模块421,用于获取驱动电机500运行的电流;
电流判断模块422,用于判断由电流获取模块421所获取的驱动电机500运行的电流是否大于预设的保护阈值;
电机控制模块423,用于依据电流判断模块422判断的结果控制驱动电机500的启停。
该技术方案能够实现驱动电机电流过载保护,此外当隐形防护网在启动过程中有异物(例如人)阻挡时,电机运行的电流就会增大,通过检测电机运行的电流以便于判断是否有异物阻挡隐形防护网,实现防止隐形防护网夹人伤人。
进一步的,所述电流获取模块421包括A/D采样模块,该A/D采样模块用于对驱动电机500运行的电流按照预设的时间间隔进行采样,每次采样获得一个驱动电机500运行的电流瞬时值。
所述电流判断模块422根据电流获取模块421连续采样n次后,按照如下公式计算n次连续采样的电流平均值:
其中,n≥2,P
所述电流判断模块422用于判断由电流获取模块421所获取的驱动电机运行的电流是否大于预设的保护阈值是指,判断M是否大于预设的保护阈值。
当电流瞬时值大于保护阈值时,并不能准确地认为已经出现驱动电机故障或者有异物阻挡隐形防护网,例如,当前电流瞬时值大于预设的保护阈值,而继当前电流瞬时值后,其余电流瞬时值又回复到低于预设的保护阈值的状态,这种情况若以电流瞬时值作为比较对象而停止驱动电机,可能出现误判,而影响隐形防护网实际的运行。
本实施例,采用电流平均值作为比较对象,实现持续性地检测,可降低误判率。
本实施例中,例如驱动电机的额定电流为5.0安培,可将预设的保护阈值定为6.0安培至8.0安培之间;可将预设的时间间隔定为5ms至20ms之间,n定为5至20次之间。
例如,将预设的保护阈值定为7.5安培,将预设的时间间隔定为10ms,n定为10次,其中假设连续10次取样的电流瞬时值依次为4.9、4.8、5.0、8.0、7.5、7.0、6.0、5.1、5.0、5.0;
那么
M<7.5(A),无需停止驱动电机。
又如,将预设的保护阈值定为7.0安培,将预设的时间间隔定为8ms,n定为8次,其中假设连续8次取样的电流瞬时值依次为4.9、4.8、5.0、6.0、7.0、9.0、10.0、12.0;
那么
M>7.0(A),此时,停止驱动电机。
所述隐形防护网的控制系统还包括用于直接或者间接测量驱动电机的输出轴的角位移的角位移测量装置600,该角位移测量装置600与控制器400电连接,以使控制器400获取角位移测量装置600的测量数据。
所述移动终端100的控制指令包括用于设定隐形防护网的开启程度的开启度控制指令;将隐形防护网的开启程度与驱动电机的输出轴的角位移建立数学模型,以使控制器400根据所述数学模型判断隐形防护网的开启程度。
所述开启度控制指令包括设定隐形防护网开启程度的终端输入值。
所述控制器400包括计数判断单元430,所述计数判断单元430包括:
角位移获取模块431,用于获取角位移测量装置的测量数据并计算出隐形防护网的网帘本体当前的位置;
位置判断模块432,用于读取移动终端的开启度控制指令,并判断隐形防护网当前的位置是否等于终端输入值;
位置判断模块432与电机控制模块423电连接;
所述电机控制模块423还用于依据位置判断模块432判断的结果控制驱动电机500的启停。
本方案能够获知隐形防护网的开启程度,并可实现远程控制隐形防护网按移动终端设定的开启度移动。
本实施例所述的角位移测量装置具体结构可参见中国发明专利申请公布说明书CN 110593737 A公开的角位移测量装置,也可参见其它现有技术公开的用于测量驱动电机的输出轴的角位移的装置,此处不再赘述。
实施例二
参见图3,一种隐形防护网的控制方法,包括以下步骤:
S1,移动终端输入控制命令。
S2,服务器接收移动终端的控制指令并发送给智能网关。
S3,智能网关将移动终端的控制指令转发给控制器。
S4,控制器按移动终端的控制指令控制驱动电机转动;所述移动终端的控制指令包括用于设定隐形防护网的开启程度的开启度控制指令;所述开启度控制指令包括设定隐形防护网开启程度的终端输入值。
S4.1,获取驱动电机运行的电流,具体步骤包括:
对驱动电机运行的电流按照预设的时间间隔进行采样,每次采样获得一个驱动电机运行的电流瞬时值,连续采样n次,n≥2;
按照如下公式计算n次连续采样的电流平均值:
其中,n≥2,P
S4.2,判断驱动电机运行的电流是否大于预设的保护阈值,即判断M是否大于预设的保护阈值;若否,启动驱动电机;若是,停止驱动电机。
S4.3,获取角位移测量装置的测量数据并计算出隐形防护网当前的位置;
S4.4,读取移动终端的开启度控制指令,并判断隐形防护网当前的位置是否等于终端输入值;若等于停止驱动电机;若不等于启动驱动电机。
上述实施例所述的隐形防护网的具体结构可参见中国发明专利申请公布说明书CN 110593737 A公开的隐形防护网,也可参见其它现有技术公开的带有驱动电机的隐形防护网,此处不再赘述。
上述优选实施方式应视为本申请方案实施方式的举例说明,凡与本申请方案雷同、近似或以此为基础作出的技术推演、替换、改进等,均应视为本专利的保护范围。
- 隐形防护网的收展控制系统及其应用的隐形防护网
- 隐形防护网的控制系统及其控制方法