基板处理装置和基板处理方法
文献发布时间:2023-06-19 12:25:57
技术领域
本公开涉及一种基板处理装置和基板处理方法。
背景技术
在专利文献1中公开了一种半导体装置的制造方法。在该制造方法中,在通过对半导体基板的第二主表面进行磨削来将该半导体基板的厚度减薄至期望的厚度后,向被磨削后的半导体基板的第二主表面上喷出期望的药液,由此对该第二主表面实施蚀刻处理。
现有技术文献
专利文献
专利文献1:日本特开2011-60893号公报
发明内容
发明要解决的问题
本公开所涉及的技术在将基板的表面薄化后,一边去除基板的背面的金属污染,一边适当地蚀刻该基板的表面。
用于解决问题的方案
本公开的一个方式涉及一种基板处理装置,对将第二基板与形成有器件层的第一基板接合而成的重合基板进行处理,所述基板处理装置具有:保持部,其保持所述第二基板的背面;处理部,其对保持于所述保持部的所述第一基板进行处理;第一处理液供给部,其向所述第一基板中与所述器件层相反的一侧的表面供给第一处理液,来蚀刻该第一基板的表面;以及第二处理液供给部,其向所述第二基板的背面供给第二处理液,来去除该第二基板的背面的金属污染。
发明的效果
根据本公开,在将基板的表面薄化后,能够一边去除基板的背面的金属污染,一边适当地蚀刻该基板的表面。
附图说明
图1是示意性地表示第一实施方式所涉及的晶圆处理系统的结构的概要的俯视图。
图2是表示重合晶圆的结构的概要的侧视图。
图3是表示重合晶圆的一部分的结构的概要的侧视图。
图4是表示蚀刻装置的结构的概要的纵剖截面图。
图5是表示保持机构的结构的概要的侧视图。
图6是表示改性装置的结构的概要的俯视图。
图7是表示改性装置的结构的概要的侧视图。
图8是表示周缘去除装置的结构的概要的俯视图。
图9是表示周缘去除装置的结构的概要的侧视图。
图10是表示搬送臂的结构的概要的纵剖截面图。
图11是表示第一实施方式所涉及的晶圆处理的主要工序的流程图。
图12是第一实施方式所涉及的晶圆处理的主要工序的说明图。
图13是表示在处理晶圆形成周缘改性层和分割改性层的情形的说明图。
图14是表示在处理晶圆形成了周缘改性层和分割改性层的情形的说明图。
图15是表示在处理晶圆形成内部面改性层的情形的说明图。
图16是表示在处理晶圆形成内部面改性层的情形的说明图。
图17是表示蚀刻装置中的蚀刻液和清洗液的液流的说明图。
图18是表示其它实施方式所涉及的重合晶圆的一部分的结构的概要的侧视图。
图19是表示周缘清洗装置的结构的概要的纵剖截面图。
图20是示意性地表示第二实施方式所涉及的晶圆处理系统的结构的概要的俯视图。
图21是表示第二实施方式所涉及的晶圆处理的主要工序的流程图。
图22是示意性地表示第三实施方式所涉及的晶圆处理系统的结构的概要的俯视图。
图23是表示第三实施方式所涉及的晶圆处理的主要工序的流程图。
图24是第三实施方式所涉及的晶圆处理的主要工序的说明图。
具体实施方式
在半导体器件的制造工序中,例如如专利文献1中公开的方法那样,针对在背面形成有多个电子电路等器件的半导体晶圆(下面称作晶圆),进行对该晶圆的表面进行磨削加工来将晶圆薄化。
当对晶圆的表面进行磨削时,会在该晶圆的表面形成包括裂纹、伤痕等的损伤层。损伤层会使晶圆中产生残余应力,因此例如将晶圆进行切割得到的芯片的抗弯强度变弱,从而有可能使芯片产生破裂、缺损。因此,进行应力消除处理以去除损伤层。具体地,作为应力消除处理,例如如专利文献1中公开的方法那样,进行通过向被磨削后的晶圆的表面喷出期望的药液来对该表面进行蚀刻处理。
另外,以如下方式进行晶圆的表面的磨削加工:在利用例如含有氧化铝等金属成分的吸盘来保持晶圆的背面、并使磨削石与晶圆的表面抵接的状态下,分别使晶圆(吸盘)和磨削石旋转。在该情况下,由于利用含有金属成分的吸盘来保持晶圆的背面,因此该背面被金属污染。然后,在该状态下,在进行了上述的蚀刻处理后,将晶圆例如收容于被称作FOUP(Front Opening Unifie Pod:前开式晶圆传送盒)的盒中。于是,盒内有可能被金属污染,对后续的处理产生影响。
因此,需要在将蚀刻处理后的晶圆收容于盒之前去除金属污染,但以往,例如如专利文献1中公开的方法那样,没有对去除该金属污染进行考虑。
本公开所涉及的技术在将晶圆的表面薄化后,一边去除晶圆的背面的金属污染,一边适当地蚀刻该晶圆的表面。下面,参照附图来说明作为本实施方式所涉及的基板处理装置的晶圆处理系统、以及作为基板处理方法的晶圆处理方法。此外,在本说明书和附图中,对具有实质上相同的功能结构的要素标注相同的标记,由此省略重复说明。
首先,对第一实施方式所涉及的晶圆处理系统的结构进行说明。图1是示意性地表示晶圆处理系统1的结构的概要的俯视图。
在晶圆处理系统1中,对如图2和图3所示、将作为第一基板的处理晶圆W与作为第二基板的支承晶圆S接合而成的作为重合基板的重合晶圆T进行期望的处理。而且,在晶圆处理系统1中将处理晶圆W薄化。下面,将处理晶圆W中要被进行加工的面(与同支承晶圆S接合的面相反的一侧的面)称作表面Wa,将与表面Wa相反的一侧的面称作背面Wb。同样,将支承晶圆S中与处理晶圆W接合的面称作表面Sa,将与表面Sa相反的一侧的面称作背面Sb。
处理晶圆W例如为硅晶圆等半导体晶圆,在背面Wb形成有包括多个器件的器件层D。另外,在器件层D还形成有氧化膜(未图示)、例如SiO
此外,在图2中,省略了器件层D的图示,以避免使图示复杂。另外,在下面的说明中使用的其它的附图中,有时也同样省略了器件层D的图示。
支承晶圆S为支承处理晶圆W的晶圆,例如为硅晶圆。在支承晶圆S的表面Sa形成有氧化膜(未图示)。另外,支承晶圆S作为保护器件层D的保护件发挥功能。此外,在支承晶圆S的表面Sa形成有多个器件的情况下,与处理晶圆W同样,在表面Sa形成器件层(未图示)。
在此,如果在处理晶圆W的周缘部We,处理晶圆W与支承晶圆S是接合的,则有可能无法适当地去除周缘部We。因此,在处理晶圆W与支承晶圆S的界面,形成支承晶圆S的表面Sa与器件层D接合的接合区域Aa以及作为接合区域Aa的径向外侧的区域的未接合区域Ab。通过像这样存在未接合区域Ab,能够适当地去除周缘部We。
如图1所示,晶圆处理系统1具有将搬入搬出站2与处理站3连接为一体的结构。搬入搬出站2例如与外部之间搬入搬出能够收容多个重合晶圆T的盒Ct。处理站3具备对重合晶圆T实施期望的处理的各种处理装置。
在搬入搬出站2设置有盒载置台10。在图示的例子中,在盒载置台10,以沿Y轴方向呈一列的方式自由载置多个、例如三个盒Ct。此外,盒Ct例如为FOUP。另外,载置于盒载置台10的盒Ct的个数不限定于本实施方式,能够任意地决定。
在搬入搬出站2的相对于盒载置台10的X轴负方向侧,与该盒载置台10邻接地设置有晶圆搬送装置20。晶圆搬送装置20构成为在沿Y轴方向延伸的搬送路径21上移动自如。另外,晶圆搬送装置20具有保持重合晶圆T并进行搬送的例如两个搬送臂22、22。各搬送臂22构成为沿水平方向、铅垂方向移动自如,并绕水平轴、铅垂轴移动自如。此外,搬送臂22的结构不限定于本实施方式,能够采取任意的结构。而且,晶圆搬送装置20构成为能够针对盒载置台10的盒Ct和后述的传送装置30搬送重合晶圆T。
在搬入搬出站2的相对于晶圆搬送装置20的X轴负方向侧,与该晶圆搬送装置20邻接地设置有用于交接重合晶圆T的传送装置30。
在处理站3例如设置有三个处理块G1~G3。第一处理块G1、第二处理块G2以及第三处理块G3按照该顺序从X轴正方向侧(搬入搬出站2侧)向负方向侧排列地配置。
在第一处理块G1设置有蚀刻装置40、清洗装置41以及晶圆搬送装置50。蚀刻装置40与清洗装置41层叠地配置。此外,蚀刻装置40和清洗装置41的数量及配置不限定于此。例如,也可以将蚀刻装置40与清洗装置41以分别沿X轴方向延伸、且俯视观察时并列地排列的方式进行载置。并且,也可以将这些蚀刻装置40以及清洗装置41各自进行层叠。
蚀刻装置40用于对被后述的加工装置80磨削后的处理晶圆W的表面Wa进行蚀刻处理。在后文叙述蚀刻装置40的具体的结构。
清洗装置41用于对被后述的加工装置80磨削后的处理晶圆W的表面Wa进行清洗。例如,使刷子与表面Wa抵接,来对该表面Wa进行刷洗清洗。此外,表面Wa的清洗也可以使用被进行了加压的清洗液。另外,清洗装置41也可以具有将支承晶圆S的背面Sb与处理晶圆W的表面Wa一同清洗的结构。
晶圆搬送装置50例如配置于相对于蚀刻装置40和清洗装置41的Y轴负方向侧。晶圆搬送装置50具有保持重合晶圆T并进行搬送的例如两个搬送臂51、51。各搬送臂51构成为沿水平方向、铅垂方向移动自如,并绕水平轴、铅垂轴移动自如。此外,搬送臂51的结构不限定于本实施方式,能够采取任意的结构。而且,晶圆搬送装置50构成为能够针对传送装置30、蚀刻装置40、清洗装置41以及后述的改性装置60搬送重合晶圆T。
在第二处理块G2设置有改性装置60、周缘去除装置61以及晶圆搬送装置70。改性装置60与周缘去除装置61层叠地配置。此外,改性装置60和周缘去除装置61的数量及配置不限定于此。
改性装置60用于向处理晶圆W的内部照射激光,来形成周缘改性层、分割改性层以及内部面改性层。在后文叙述改性装置60的具体的结构。
周缘去除装置61以由改性装置60形成的周缘改性层为基点来去除处理晶圆W的周缘部We。在后文叙述周缘去除装置61的具体的结构。
晶圆搬送装置70例如配置于相对于改性装置60和周缘去除装置61的Y轴正方向侧。晶圆搬送装置70具有保持重合晶圆T并进行搬送的例如两个搬送臂71、71。各搬送臂71支承于多关节的臂构件72,构成为沿水平方向、铅垂方向移动自如,并绕水平轴和铅垂轴移动自如。在后文叙述搬送臂71的具体的结构。而且,晶圆搬送装置70构成为能够针对清洗装置41、改性装置60、周缘去除装置61以及后述的加工装置80搬送重合晶圆T。
在第三处理块G3设置有作为加工部的加工装置80。此外,加工装置80的数量及配置不限定于本实施方式,也可以任意地配置有多个加工装置80。
加工装置80用于对处理晶圆W的表面Wa进行磨削。而且,用于去除形成有内部面改性层的表面Wa中的该内部面改性层,并用于进一步去除周缘改性层。
加工装置80具有旋转台81。旋转台81构成为通过旋转机构(未图示)以铅垂的旋转中心线82为中心旋转自如。在旋转台81上设置有两个用于对重合晶圆T进行吸附保持的作为保持部的吸盘83。吸盘83均等地配置于与旋转台81同一圆周上。能够通过使旋转台81旋转,来使两个吸盘83移动至交接位置A0和加工位置A1。另外,两个吸盘83分别构成为能够通过旋转机构(未图示)绕铅垂轴旋转。此外,吸盘83例如含有氧化铝等金属成分。
在交接位置A0进行重合晶圆T的交接。在加工位置A1配置磨削单元84。在磨削单元84对处理晶圆W的表面Wa进行磨削。磨削单元84具有磨削部85,该磨削部85具备呈环状形状且旋转自如的磨削石(未图示)。磨削石例如含有金属成分。另外,磨削部85构成为能够沿着支柱86沿铅垂方向移动。而且,在使磨削石与保持于吸盘83的处理晶圆W的表面Wa抵接的状态下,分别使吸盘83和磨削石旋转来对表面Wa进行磨削。
在以上的晶圆处理系统1中设置有作为控制部的控制装置90。控制装置90例如为计算机,具有程序保存部(未图示)。在程序保存部保存有用于控制晶圆处理系统1中的重合晶圆T的处理的程序。另外,在程序保存部还保存有用于控制上述的各种处理装置、搬送装置等的驱动系统的动作来实现晶圆处理系统1中的后述的基板处理的程序。此外,上述程序也可以记录于可由计算机读取的存储介质H,来从该存储介质H安装至控制装置90。
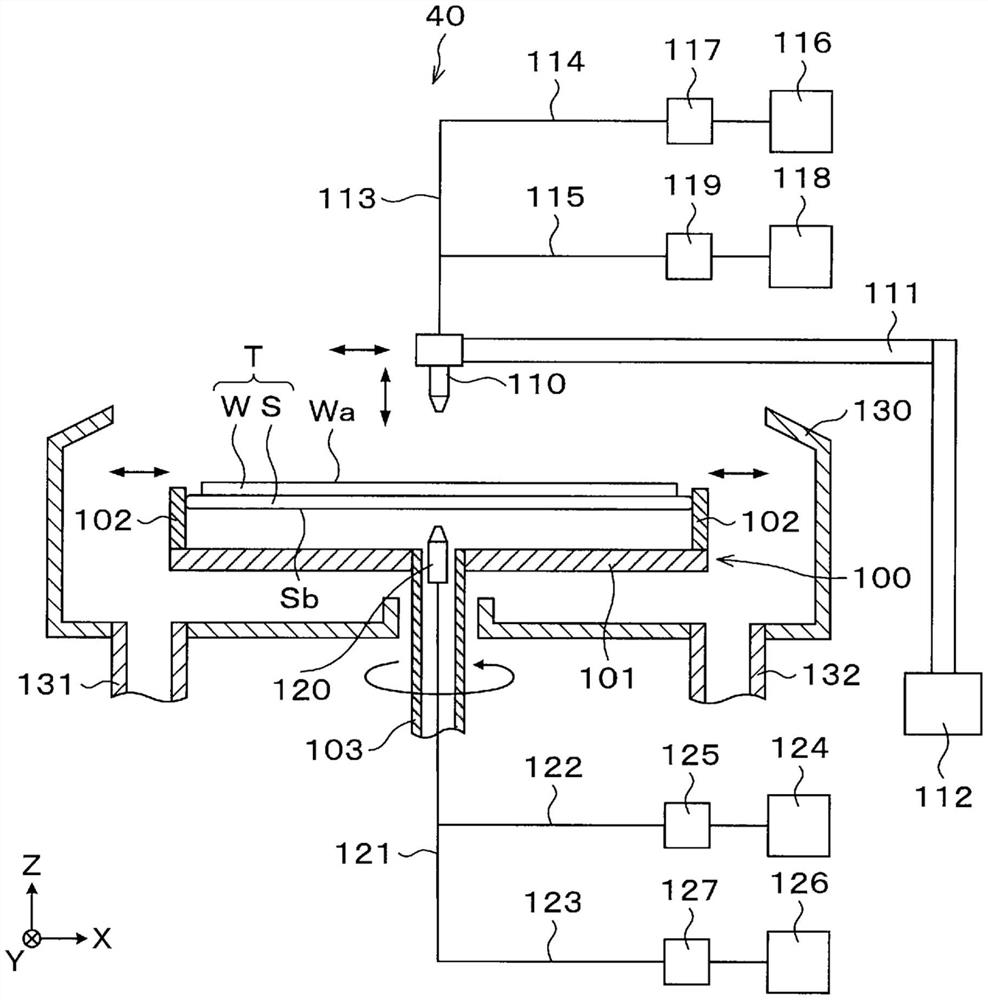
接着,说明上述的蚀刻装置40。图4是表示蚀刻装置40的结构的概要的纵剖截面图。
蚀刻装置40具有用于保持重合晶圆T的保持机构100。保持机构100具有大致圆板状的基部101和设置于基部101的外周部的多个保持构件102,该基部101具有比重合晶圆T的直径大的直径。如图5所示,在保持构件102的侧面形成有用于嵌入支承晶圆S的外缘部的凹入部102a。而且,如图4所示,由多个保持构件102保持重合晶圆T的支承晶圆S。此外,各保持构件102构成为通过移动机构(未图示)沿水平方向移动自如。
在基部101的中央部设置有旋转机构103。旋转机构103与旋转驱动部(未图示)连接,旋转机构103构成为通过该旋转机构103使基部101和保持于基部101的重合晶圆T旋转自如。此外,旋转机构103以中空的方式构成。
在基部101的上方设置有作为第一处理液供给部的第一喷嘴110。第一喷嘴110支承于喷嘴臂111,在喷嘴臂111设置有移动机构112。第一喷嘴110构成为通过移动机构112旋转自如,另外构成为通过移动机构112沿铅垂方向移动自如。
第一喷嘴110与向处理晶圆W的表面Wa供给冲洗液和作为第一处理液的蚀刻液的供给管113连接。供给管113在与第一喷嘴110相反的一侧分支为蚀刻液供给管114和冲洗液供给管115。
蚀刻液供给管114与在内部贮存蚀刻液的蚀刻液供给源116连接。蚀刻液例如使用HF、HNO
冲洗液供给管115与在内部贮存冲洗液、例如纯水的冲洗液供给源118连接。另外,在冲洗液供给管115设置有用于控制冲洗液的供给的阀119。此外,用于供给冲洗液的喷嘴也可以独立于第一喷嘴110进行设置。
在基部101的下方设置有作为第二处理液供给部的第二喷嘴120。第二喷嘴120被设置为从以中空的方式构成的旋转机构103突出。
第二喷嘴120与用于向支承晶圆S的背面Sb供给冲洗液和作为第二处理液的清洗液的供给管121连接。供给管121从旋转机构103的内部插入穿出,并在与第二喷嘴120相反的一侧分支为清洗液供给管122和冲洗液供给管123。
清洗液供给管122与在内部贮存清洗液的清洗液供给源124连接。清洗液例如使用FPM(氟酸过氧化氢水溶液(日语:フッ酸過酸化水素水溶液))、SC2(盐酸过氧化氢水溶液(日语:塩酸過酸化水素水溶液))等。另外,在清洗液供给管122设置有用于控制清洗液的供给的阀125。利用该清洗液来去除支承晶圆S的背面Sb的金属污染。
冲洗液供给管123与在内部贮存冲洗液、例如纯水的冲洗液供给源126连接。另外,在冲洗液供给管123设置有用于控制冲洗液的供给的阀127。此外,用于供给冲洗液的喷嘴也可以独立于第二喷嘴120进行设置。
在保持机构100的周围设置有用于接住并回收从重合晶圆T飞散或下落的液体的杯130。杯130的下表面与用于排出回收到的液体的排出管131以及用于对杯130内的气氛进行抽真空来进行排气的排气管132连接。
接着,说明上述的改性装置60。图6是表示改性装置60的结构的概要的俯视图。图7是表示改性装置60的结构的概要的侧视图。
改性装置60具有在上表面保持重合晶圆T的作为保持部的吸盘140。吸盘140在处理晶圆W配置于上侧且支承晶圆S配置于下侧的状态下对该支承晶圆S进行吸附保持。吸盘140例如含有氧化铝等金属成分。吸盘140经由空气轴承141支承于滑动台142。在滑动台142的下表面侧设置有旋转机构143。旋转机构143内置作为驱动源的例如马达。吸盘140构成为通过旋转机构143来借助空气轴承141绕铅垂轴旋转自如。滑动台142构成为能够通过设置于其下表面侧的移动机构144沿着设置于基台146并沿Y轴方向延伸的导轨145移动。此外,对移动机构144的驱动源没有特别限定,例如使用直线马达。
在吸盘140的上方设置有作为改性部的激光头150。激光头150具有镜头151。镜头151为设置于激光头150的下表面的筒状的构件,用于向保持于吸盘140的处理晶圆W照射激光。
激光头150向处理晶圆W的内部的期望位置聚光照射从激光振荡器(未图示)振荡出的高频脉冲状且针对处理晶圆W具有透射性的波长的激光。由此,处理晶圆W的内部中激光聚光的部分被改性,形成周缘改性层、分割改性层以及内部面改性层。
激光头150支承于支承构件152。激光头150构成为通过升降机构154沿着沿铅垂方向延伸的导轨153升降自如。另外,激光头150构成为通过移动机构155沿Y轴方向移动自如。此外,升降机构154和移动机构155各自支承于支承柱156。
在吸盘140的上方且相对于激光头150的Y轴正方向侧,设置有宏观相机(日语:マクロカメラ)160和微观相机(日语:マイクロカメラ)161。例如,宏观相机160和微观相机161一体地构成,宏观相机160配置于相对于微观相机161的Y轴正方向侧。宏观相机160和微观相机161构成为通过升降机构162升降自如,还构成为通过移动机构163沿Y轴方向移动自如。
宏观相机160用于拍摄处理晶圆W(重合晶圆T)的外侧端部。宏观相机160例如具备同轴镜头,照射可见光、例如红外光,并且接受来自对象物的反射光。此外,例如,宏观相机160的摄像倍率为2倍。
微观相机161用于拍摄处理晶圆W的周缘部,用于拍摄接合区域Aa与未接合区域Ab的边界。微观相机161例如具备同轴镜头,照射红外光(IR光),并且接受来自对象物的反射光。此外,例如,微观相机161的摄像倍率为10倍,视场为宏观相机160的约1/5,像素尺寸为宏观相机160的约1/5。
接着,对上述的周缘去除装置61进行说明。图8是表示周缘去除装置61的结构的概要的俯视图。图9是表示周缘去除装置61的结构的概要的侧视图。
周缘去除装置61具有在上表面保持重合晶圆T的吸盘170。吸盘170在处理晶圆W配置于上侧且支承晶圆S配置于下侧的状态下对该支承晶圆S进行吸附保持。另外,吸盘170构成为能够通过旋转机构171绕铅垂轴旋转。
在吸盘170的上方设置有用于保持处理晶圆W的周缘部We并进行移送的吸垫180。吸垫180例如与真空泵等抽吸机构(未图示)连接,吸垫180在其下表面对周缘部We进行吸附保持。在吸垫180设置有使吸垫180沿铅垂方向升降的升降机构181和使吸垫180沿水平方向(X轴方向和Y轴方向)移动的移动机构182。
在吸盘170的上方设置有用于确认是否已从处理晶圆W去除周缘部We的探测部190。探测部190在保持于吸盘170且对周缘部We进行了去除的处理晶圆W中探测有无周缘部We。探测部190例如使用传感器。传感器例如为线型的激光位移计,通过向重合晶圆T(处理晶圆W)的周缘部照射激光测定该重合晶圆T的厚度,来探测有无周缘部We。此外,利用探测部190探测有无周缘部We的探测方法不限定于此。例如,探测部190例如也可以使用线型相机,通过拍摄重合晶圆T(处理晶圆W)来探测有无周缘部We。
此外,在吸盘170的下方设置有用于回收由吸垫180移送来的周缘部We的回收部(未图示)。回收部收容由吸垫180吸附保持的周缘部We进行回收。
接着,对上述的晶圆搬送装置70的作为分离部的搬送臂71进行说明。图10是表示搬送臂71的结构的概要的纵剖截面图。
搬送臂71具有圆板状的吸附板200,该吸附板200具有比重合晶圆T的直径大的直径。在吸附板200的下表面设置有用于保持处理晶圆W的中央部Wc的保持部210。
保持部210与对中央部Wc进行抽吸的抽吸管211连接,抽吸管211例如与真空泵等抽吸机构212连通。在抽吸管211设置有用于测定抽吸压力的压力传感器213。压力传感器213的结构是任意的,例如使用隔膜型的压力计。
在吸附板200的上表面设置有用于使该吸附板200绕铅垂轴旋转的旋转机构220。旋转机构220支承于支承构件221。另外,支承构件221(旋转机构220)支承于臂构件72。
接着,对使用以上那样构成的晶圆处理系统1进行的晶圆处理进行说明。图11是表示晶圆处理的主要的工序的流程图。图12是晶圆处理的主要工序的说明图。此外,在本实施方式中,在晶圆处理系统1的外部的接合装置(未图示)中将处理晶圆W与支承晶圆S接合,而预先形成有重合晶圆T。
首先,将收纳有多个图12的(a)所示的重合晶圆T的盒Ct载置于搬入搬出站2的盒载置台10。
接着,由晶圆搬送装置20取出盒Ct内的重合晶圆T,并搬送至传送装置30。接着,由晶圆搬送装置50取出传送装置30的重合晶圆T,并搬送至改性装置60。在改性装置60中,如图12的(b)所示那样在处理晶圆W的内部依次形成周缘改性层M1和分割改性层M2(图11的步骤A1、A2),还如图12的(c)所示那样形成内部面改性层M3(图11的步骤A3)。周缘改性层M1为在修边中去除周缘部We时的基点。分割改性层M2为用于将要被去除的周缘部We小片化的基点。内部面改性层M3为用于将处理晶圆W薄化的基点。
首先,从晶圆搬送装置50搬入重合晶圆T,并保持于吸盘140。接着,使吸盘140移动至宏观对准位置。宏观对准位置为宏观相机160能够拍摄到处理晶圆W的外侧端部的位置。
接着,由宏观相机160拍摄处理晶圆W的周向360度的外侧端部的图像。拍摄到的图像被宏观相机160输出至控制装置90。
在控制装置90中,根据宏观相机160的图像来计算吸盘140的中心Cc与处理晶圆W的中心Cw的第一偏心量。并且,在控制装置90中,基于第一偏心量来计算吸盘140的移动量,以校正该第一偏心量的Y轴成分。吸盘140基于计算出的该移动量沿Y轴方向移动,使吸盘140移动至微观对准位置。微观对准位置为微观相机161能够拍摄到处理晶圆W的周缘部的位置。在此,如上所述,微观相机161的视场小至宏观相机160的约1/5,因此如果不校正第一偏心量的Y轴成分,则有时处理晶圆W的周缘部不进入微观相机161的视角,无法由微观相机161进行拍摄。因此,也可以说基于第一偏心量的Y轴成分的校正是为了使吸盘140移动至微观对准位置。
接着,由微观相机161拍摄处理晶圆W的周向360度的接合区域Aa与未接合区域Ab的边界。拍摄到的图像被微观相机161输出至控制装置90。
在控制装置90中,根据微观相机161的图像来计算吸盘140的中心Cc与接合区域Aa的中心Ca的第二偏心量。并且,在控制装置90中,基于第二偏心量来决定吸盘140相对于周缘改性层M1的位置,以使接合区域Aa的中心与吸盘140的中心一致。
接着,如图13和图14所示,从激光头150照射激光L1(周缘用激光L1),来在处理晶圆W的周缘部We与中央部Wc的边界形成周缘改性层M1(图11的步骤A1)。此外,周缘改性层M1形成于比接合区域Aa的外侧端部靠径向内侧的位置。
通过上述激光L1形成的周缘改性层M1沿厚度方向延伸,具有纵长的长宽比。周缘改性层M1的下端位于比薄化后的处理晶圆W的目标表面(图13中的点线)靠上方的位置。即,周缘改性层M1的下端与处理晶圆W的背面Wb之间的距离H1比薄化后的处理晶圆W的目标厚度H2大。在该情况下,周缘改性层M1不会残留于薄化后的处理晶圆W。此外,在处理晶圆W的内部,裂纹C1从周缘改性层M1起进展,到达表面Wa和背面Wb。
在步骤A1中,根据由控制装置90决定出的吸盘140的位置,通过旋转机构143使吸盘140旋转,并且通过移动机构144使吸盘140沿Y轴方向移动,以使接合区域Aa的中心与吸盘140的中心一致。此时,使吸盘140的旋转与Y轴方向的移动同步。
然后,一边像这样使吸盘140(处理晶圆W)旋转和移动,一边从激光头150向处理晶圆W的内部照射激光L1。即,一边校正第二偏心量,一边形成周缘改性层M1。于是,周缘改性层M1形成为与接合区域Aa呈同心圆状的环状。即,能够使图13所示的周缘改性层M1与接合区域Aa的外侧端部之间的距离D固定。因此,之后在周缘去除装置61中,能够以周缘改性层M1为基点适当地去除周缘部We。
此外,在本例中,在第二偏心量具备X轴成分的情况下,一边使吸盘140沿Y轴方向移动,一边使吸盘140旋转来校正该X轴成分。另一方面,在第二偏心量不具备X轴成分的情况下,不使吸盘140旋转,仅使吸盘140沿Y轴方向移动即可。
接着,使激光头150沿Y轴方向移动,并如图13和图14所示那样从激光头150照射激光L2(分割用激光L2),在周缘改性层M1的径向外侧形成分割改性层M2(图11的步骤A2)。
分割改性层M2与周缘改性层M1同样,也沿厚度方向延伸,具有纵长的长宽比。此外,在本实施方式中,分割改性层M2形成为与周缘改性层M1相同的高度。另外,裂纹C2从分割改性层M2起进展,到达表面Wa和背面Wb。
另外,在径向上以数μm的间距形成多个分割改性层M2和裂纹C2,由此如图14所示,形成从周缘改性层M1起向径向外侧延伸的、一排的分割改性层M2。此外,在图示的例子中,在八个部位形成有沿径向延伸的成排的分割改性层M2,但该分割改性层M2的数量是任意的。至少在两个部位形成有分割改性层M2就能够去除周缘部We。在该情况下,当在修边中去除周缘部We时,一边以环状的周缘改性层M1为基点将该周缘部We分离,一边通过分割改性层M2将该周缘部We分割为多个。于是,要被去除的周缘部We被小片化,能够更容易地被去除。此外,进行周缘部We的该去除(所谓的修边)是因为该去除回避磨削后的处理晶圆W的周缘部We形成尖锐的形状(所谓的利刃形状)的问题。
此外,在本实施方式中,在形成分割改性层M2时,使激光头150沿Y轴方向移动,但也可以使吸盘140沿Y轴方向移动。
接着,如图15和图16所示,从激光头150照射激光L3(内部面用激光L3),沿着面方向形成内部面改性层M3(图11的步骤A3)。此外,图16所示的实心箭头表示吸盘140的旋转方向,在下面的说明中也同样如此。
内部面改性层M3的下端位于比薄化后的处理晶圆W的目标表面(图15中的点线)稍靠上方的位置。即,内部面改性层M3的下端与处理晶圆W的背面Wb之间的距离H3比薄化后的处理晶圆W的目标厚度H2稍大。此外,在处理晶圆W的内部,裂纹C3从内部面改性层M3起沿面方向进展。
在步骤A3中,使吸盘140(处理晶圆W)旋转,并且一边使激光头150从处理晶圆W的外周部去向中心部地沿Y轴方向移动,一边从激光头150向处理晶圆W的内部照射激光L3。于是,在处理晶圆W的面内,从外侧向内侧呈螺旋状地形成内部面改性层M3。
此外,在本实施方式中,在形成内部面改性层M3时,使激光头150沿Y轴方向移动,但也可以使吸盘140沿Y轴方向移动。另外,在形成内部面改性层M3时,使吸盘140旋转,但也可以使激光头150移动来使激光头150相对于吸盘140相对地旋转。
接着,当在处理晶圆W形成内部面改性层M3时,由晶圆搬送装置70搬出重合晶圆T。
接着,由晶圆搬送装置70将重合晶圆T搬送至周缘去除装置61。在周缘去除装置61中,如图12的(d)所示,以周缘改性层M1为基点来去除处理晶圆W的周缘部We(图11的步骤A4)。在步骤A4中,在通过升降机构181使吸垫180下降来对周缘部We进行了吸附保持后,再使吸垫180上升。于是,被保持于吸垫180的周缘部We以周缘改性层M1为基点从处理晶圆W分离。此时,周缘部We以分割改性层M2为基点小片化地分离。此外,将被去除的周缘部We从吸垫180回收至回收部(未图示)。
接着,由晶圆搬送装置70将重合晶圆T搬送至加工装置80。在加工装置80中,首先,由搬送臂71将重合晶圆T交接到交接位置A0的吸盘83。此时,如图12的(e)所示,以内部面改性层M3为基点,将处理晶圆W的表面Wa侧(下面称作表面晶圆Wa1)分离(图11的步骤A5)。
在步骤A5中,在由搬送臂71的吸附板200吸附保持处理晶圆W的同时,由吸盘83吸附保持支承晶圆S。然后,使吸附板200旋转,来以内部面改性层M3为边界切掉表面晶圆Wa1。之后,在吸附板200吸附保持表面晶圆Wa1的状态下使该吸附板200上升,来将表面晶圆Wa1从处理晶圆W分离。此时,能够通过利用压力传感器213测定抽吸表面晶圆Wa1的压力,来探测有无表面晶圆Wa1,从而确认表面晶圆Wa1是否从处理晶圆W分离。此外,将分离的表面晶圆Wa1回收至晶圆处理系统1的外部。
接着,使吸盘83移动至加工位置A1。然后,如图12的(f)所示,由磨削单元84对保持于吸盘83的处理晶圆W的表面Wa进行磨削,来去除残留于该表面Wa的内部面改性层M3和周缘改性层M1(图11的步骤A6)。在步骤A6中,在使磨削石与表面Wa抵接的状态下,分别使处理晶圆W和磨削石旋转来对表面Wa进行磨削。此外,之后,也可以使用清洗液喷嘴(未图示)来利用清洗液对处理晶圆W的表面Wa进行清洗。
接着,由晶圆搬送装置70将重合晶圆T搬送至清洗装置41。在清洗装置41中,对处理晶圆W的作为磨削面的表面Wa进行刷洗清洗(图11的步骤A7)。此外,在清洗装置41中,也可以将支承晶圆S的背面Sb与处理晶圆W的表面Wa一同进行清洗。
接着,由晶圆搬送装置50将重合晶圆T搬送至蚀刻装置40。在蚀刻装置40中,蚀刻处理晶圆W的表面Wa,并且去除支承晶圆S的背面Sb的金属污染(图11的步骤A8)。在步骤A8中,首先,由晶圆搬送装置50将重合晶圆T交接至保持机构100,并进行保持。
接着,在通过旋转机构103使保持于保持机构100的重合晶圆T旋转的状态下,从第一喷嘴110向处理晶圆W的表面Wa供给蚀刻液E1。在该情况下,利用蚀刻液E1蚀刻处理晶圆W的表面Wa。在上述的被加工装置80磨削后的表面Wa形成损伤层。对此,能够通过对表面Wa进行湿蚀刻来去除损伤层,从而去除应力(stress),能够将表面Wa平滑化。在此,在利用上述的加工装置80对表面Wa进行磨削时,由含有金属成分的吸盘83来保持支承晶圆S的背面Sb,因此有时产生金属垃圾(日语:金属のゴム)并绕到表面Wa。另外,由于利用含有金属成分的磨削石进行磨削,因此还有时在表面Wa附着金属。并且,在改性装置60中也是,由含有金属成分的吸盘140保持支承晶圆S的背面Sb,因此有时产生金属垃圾并绕到表面Wa。对此,利用蚀刻液E1还能够去除处理晶圆W的表面Wa的金属污染。
另外,在从第一喷嘴110向处理晶圆W的表面Wa供给蚀刻液E1的同时,从第二喷嘴120向支承晶圆S的背面Sb供给清洗液E2。如上所述,在由加工装置80对表面Wa进行磨削时,由含有金属成分的吸盘83保持背面Sb,因此该背面Sb被金属污染。另外,在改性装置60中也是,由含有金属成分的吸盘140保持支承晶圆S的背面Sb,因此该背面Sb被金属污染。对此,能够利用清洗液E2来去除支承晶圆S的背面Sb的金属污染。
而且,此时,优选使得如图17所示,蚀刻液E1在重合晶圆T的侧方不到达器件层D,清洗液E2在重合晶圆T的侧方到达器件层D。具体地说,可以使从第二喷嘴120供给的清洗液E2的供给量比从第一喷嘴110供给的蚀刻液E1的供给量多。在该情况下,能够抑制器件层D被蚀刻液E1蚀刻,从而能够保护器件层D。
此外,在本实施方式中,使进行利用蚀刻液E1进行的表面Wa的蚀刻的时间与进行利用清洗液E2进行的背面Sb的金属污染的去除的时间相同。具体地说,例如通过调节蚀刻液E1和清洗液E2各自的浓度、温度来调节上述时间。而且,使表面Wa的蚀刻与背面Sb的金属污染去除的开始定时及结束定时相同。
接着,当表面Wa的蚀刻和背面Sb的金属污染去除结束时,在维持通过旋转机构103使重合晶圆T旋转的状态下,从第一喷嘴110向表面Wa供给冲洗液,并且从第二喷嘴120向背面Sb供给冲洗液。而且,同时进行表面Wa的冲洗和背面Sb的冲洗。之后,还维持通过旋转机构103使重合晶圆T旋转,来甩脱冲洗液进行干燥。
之后,由晶圆搬送装置50将被实施了全部的处理后的重合晶圆T搬送至传送装置30,进一步由晶圆搬送装置20搬送至盒载置台10的盒Ct。这样,晶圆处理系统1中的一系列的晶圆处理结束。
根据以上的实施方式,在步骤A8中,进行利用蚀刻液E1进行的处理晶圆W的表面Wa的蚀刻和利用清洗液E2进行的支承晶圆S的背面Sb的金属污染的去除。因而,能够使进行了步骤A8后的重合晶圆T为洁净的状态,能够将该重合晶圆T返回到盒Ct。其结果,能够抑制盒Ct内被金属污染,从而能够适当地进行后续的处理。另外,也不在需要更换盒Ct等的劳力和时间。
在此,以往,进行表面Wa的蚀刻后将其返回到盒Ct,并且在晶圆处理系统1的外部进行清洗,因此晶圆处理的吞吐量下降。关于该点,在本实施方式中,在蚀刻装置40中,除了进行表面Wa的蚀刻以外,还进行背面Sb的金属污染的去除,因此能够提高晶圆处理的吞吐量。
另外,在步骤A8中,同时进行利用蚀刻液E1进行的蚀刻和利用清洗液E2进行的金属污染的去除,因此能够进一步提高晶圆处理的吞吐量。此外,蚀刻和金属污染去除无需同时进行,例如也可以连续地进行。
并且,在步骤A8中,使利用蚀刻液E1进行的蚀刻的结束定时与利用清洗液E2进行的金属污染的去除的结束定时相同,因此能够同时进行之后的冲洗处理。其结果,能够进一步提高晶圆处理的吞吐量。
此外,在以上的实施方式中,使利用蚀刻液E1进行蚀刻的时间与利用清洗液E2进行金属污染的去除的时间相同,并使各自的结束定时相同,但该蚀刻时间与金属污染去除时间也可以不同。在该情况下,能够通过使蚀刻的开始定时与金属污染去除的开始定时错开来使结束定时相同。具体地说,根据蚀刻时间来控制从第二喷嘴120供给清洗液E2的供给开始定时。通过像这样固定蚀刻时间,能够防止表面Wa的过蚀刻。
在以上的实施方式中,作为蚀刻液E1,例如使用HF、HNO
例如,在表面Wa的目标蚀刻高度与器件层D的上表面相比足够高的情况下,如上述实施方式那样,只使用酸性的蚀刻液为宜。由于酸性的蚀刻液的蚀刻速度快,因此能够缩短蚀刻所花费的时间。
另一方面,例如,在表面Wa的目标蚀刻高度接近器件层D的上表面的情况下,也可以在使用酸性的蚀刻液后切换为碱性的蚀刻液。当假设仅利用酸性的蚀刻液来蚀刻表面Wa时,由于蚀刻速度快,因此有可能发生过蚀刻,连器件层D也被蚀刻。因此,通过在利用酸性的蚀刻液将表面Wa蚀刻到某程度后切换为碱性的蚀刻来进行蚀刻,能够防止所述的过蚀刻。
此外,在像这样使用碱性的蚀刻液的情况下,也可以如图18的(a)所示、在处理晶圆W的背面Wb与器件层D之间形成有保护器件层D的保护膜P。保护膜P例如使用氧化膜,碱性的蚀刻液不蚀刻保护膜P。在该情况下,即使如图18的(b)所示、将表面Wa蚀刻到器件层D的上表面的附近,通过保护膜P也能够防止蚀刻液到达器件层D。
此外,无论表面Wa的目标蚀刻高度为上述哪种情况,均可以仅使用碱性的蚀刻液来蚀刻表面Wa。
在以上的实施方式中,也可以在通过步骤A6对表面Wa进行磨削后且通过步骤A8进行表面Wa的蚀刻和背面Sb的金属污染去除之前,对支承晶圆S的周缘部进行清洗。例如使用图19所示的周缘清洗装置230来进行支承晶圆S的周缘部的清洗。周缘清洗装置230例如与蚀刻装置40及清洗装置41层叠地设置在第一处理块G1中。
周缘清洗装置230具有作为周缘去除部的上方喷嘴231和下方喷嘴232。上方喷嘴231从上方向支承晶圆S的周缘部供给清洗液。下方喷嘴232从下方向支承晶圆S的周缘部供给清洗液。上方喷嘴231及下方喷嘴232分别与在内部贮存清洗液的清洗液供给源(未图示)连通。
另外,周缘清洗装置230具有用于使重合晶圆T旋转并保持该重合晶圆T的旋转吸盘(未图示)。而且,在重合晶圆T保持于旋转吸盘并旋转的状态下,从上方喷嘴231和下方喷嘴232向支承晶圆S的周缘部供给清洗液来清洗该周缘部。此外,已使用的清洗液被回收至设置于旋转吸盘的周围的杯(未图示)。
例如,当在步骤A8中使用清洗液E2来进行背面Sb的金属污染去除时,存在如下情况:清洗液E2不绕到支承晶圆S的周缘部,该周缘部的金属污染的去除不充分。即使在该情况下,也能够在周缘清洗装置230中适当地去除支承晶圆S的周缘部的金属污染。
接着,说明第二实施方式所涉及的晶圆处理系统的结构。图20是示意性地表示晶圆处理系统300的结构的概要的俯视图。图21是表示晶圆处理的主要工序的流程图。
如图20所示,晶圆处理系统300从第一实施方式的晶圆处理系统1的结构中省略了加工装置80。
如图21所示,在晶圆处理系统300中,依次进行周缘改性层M1的形成(图21的步骤B1)、分割改性层M2的形成(图21的步骤B2)、内部面改性层M3的形成(图21的步骤B3)、周缘部We的去除(图21的步骤B4)、表面晶圆Wa1的分离(图21的步骤B5)、表面Wa的清洗(图21的步骤B6)。这些步骤B1~B6分别与第一实施方式的步骤A1~A5、A7相同。
接着,在蚀刻装置40中,进行利用蚀刻液E1进行的表面Wa的蚀刻和利用清洗液E2进行的背面Sb的金属污染的去除(图21的步骤B7)。在此,在晶圆处理系统300中,省略了第一实施方式中的步骤A6的处理晶圆W的表面Wa的磨削,在步骤B7中,利用蚀刻液E1通过蚀刻来进行表面Wa的与该磨削相应的量的薄化。
在本第二实施方式中,也能够得到与上述第一实施方式同样的效果。
接着,说明第三实施方式所涉及的晶圆处理系统的结构。图20是示意性地表示晶圆处理系统400的结构的概要的俯视图。
在晶圆处理系统400中,在将处理晶圆W的表面Wa薄化时,对表面Wa进行磨削,来代替如第一实施方式那样形成内部面改性层M3将表面晶圆Wa1分离。具体地说,晶圆处理系统400具有具备加工装置410来代替第一实施方式的晶圆处理系统1的加工装置80的结构。
加工装置410用于对处理晶圆W的表面Wa进行磨削。加工装置410具有旋转台420、粗磨削单元430、中磨削单元440以及精磨削单元450。
旋转台420构成为通过旋转机构(未图示)来以铅垂的旋转中心线421为中心旋转自如。在旋转台420上设置有四个用于吸附保持重合晶圆T的作为保持部的吸盘422。吸盘422均等地、即每隔90度地配置于与旋转台420同一圆周上。能够通过使旋转台420旋转,来使四个吸盘422移动至交接位置A0和加工位置A1~A3。另外,四个吸盘422分别构成为能够通过旋转机构(未图示)绕铅垂轴旋转。此外,吸盘422例如含有氧化铝等金属成分。
在本实施方式中,交接位置A0为旋转台420的X轴正方向侧且Y轴正方向侧的位置,用于进行重合晶圆T的交接。第一加工位置A1为旋转台420的X轴负方向侧且Y轴正方向侧的位置,被配置粗磨削单元430。第二加工位置A2为旋转台420的X轴负方向侧且Y轴负方向侧的位置,被配置中磨削单元440。第三加工位置A3为旋转台420的X轴正方向侧且Y轴负方向侧的位置,被配置精磨削单元450。
在粗磨削单元430中,对处理晶圆W的表面Wa进行粗磨削。粗磨削单元430具有具备呈环状形状且旋转自如的粗磨削石(未图示)的粗磨削部431。粗磨削石例如含有金属成分。另外,粗磨削部431构成为能够沿着支柱432沿铅垂方向移动。而且,在使粗磨削石与保持于吸盘422的处理晶圆W的表面Wa抵接的状态下,分别使吸盘422与粗磨削石旋转来对表面Wa进行粗磨削。
在中磨削单元440中,对处理晶圆W的表面Wa进行中磨削。中磨削单元440具有具备呈环状形状且旋转自如的中磨削石(未图示)的中磨削部441。中磨削石例如含有金属成分。另外,中磨削部441构成为能够沿着支柱442沿铅垂方向移动。此外,中磨削石的磨粒的粒度比粗磨削石的磨粒的粒度小。而且,在使中磨削石与保持于吸盘422的处理晶圆W的表面Wa抵接的状态下,分别使吸盘422和中磨削石旋转来对表面Wa进行中磨削。
在精磨削单元450中,对处理晶圆W的表面Wa进行精磨削。精磨削单元450具有具备呈环状形状且旋转自如的精磨削石(未图示)的精磨削部451。精磨削石例如含有金属成分。另外,精磨削部451构成为能够沿着支柱452沿铅垂方向移动。此外,精磨削石的磨粒的粒度比中磨削石的磨粒的粒度小。而且,在使精磨削石与保持于吸盘422的处理晶圆W的表面Wa抵接的状态下,分别使吸盘422和精磨削石旋转来对表面Wa进行精磨削。
接着,说明使用以上那样构成的晶圆处理系统400进行的晶圆处理。图23是表示晶圆处理的主要工序的流程图。图24是晶圆处理的主要工序的说明图。
在晶圆处理系统400中,首先,在改性装置60中,如图24的(a)及(b)所示,在处理晶圆W的内部形成周缘改性层M1(图23的步骤C1),并且形成分割改性层M2(图23的步骤C2)。这些步骤C1~C2分别与第一实施方式的步骤A1~A2相同。
接着,在周缘去除装置61中,如图24的(c)所示,以周缘改性层M1为基点来去除处理晶圆W的周缘部We(图23的步骤C3)。该步骤C3与第一实施方式的步骤A4相同。
接着,在加工装置410中,对处理晶圆W的表面Wa进行磨削。将被搬送至加工装置410的重合晶圆T交接至交接位置A0的吸盘422。接着,使吸盘422移动至第一加工位置A1。然后,如图24的(d)所示,由粗磨削单元430对处理晶圆W的表面Wa进行粗磨削(图23的步骤C4)。
接着,使吸盘422移动至第二加工位置A2。然后,由中磨削单元440对处理晶圆W的表面Wa进行中磨削(图23的步骤C5)。
接着,使吸盘422移动至第三加工位置A3。然后,由精磨削单元450对处理晶圆W的表面Wa进行精磨削(图23的步骤C6)。
接着,使吸盘422移动至交接位置A0。此外,也可以在交接位置A0,使用清洗液喷嘴(未图示)来利用清洗液对处理晶圆W的表面Wa进行清洗。
接着,在清洗装置41中,对处理晶圆W的表面Wa进行刷洗清洗(图23的步骤C7)。该步骤C7与第一实施方式的步骤A7相同。
接着,在蚀刻装置40中,进行利用蚀刻液E1进行的表面Wa的蚀刻和利用清洗液E2进行的背面Sb的金属污染的去除(图23的步骤C8)。该步骤C8与第一实施方式的步骤A8相同。
如以上那样,在晶圆处理系统400中进行一系列的晶圆处理。在本第三实施方式中,也能够得到与上述第一实施方式同样的效果。
此外,在以上的实施方式中,关于周缘部We的去除,在周缘去除装置61中以利用吸垫180保持周缘部We的方式进行去除,但去除方法不限定于此。例如,也可以以针对周缘部We施加物理冲击、超声波等的方式去除。
另外,在以上的实施方式中,关于将表面晶圆Wa1从处理晶圆W的分离,在由晶圆搬送装置70的搬送臂71将重合晶圆T交接至加工装置80的吸盘83时进行,但分离方法不限定于此。例如,也可以在与周缘去除装置61同一装置内设置分离装置(未图示),还可以另外设置分离装置(未图示)。
应认为,本次公开的实施方式的所有点均是例示性的而非限制性的。可以不脱离所附的权利要求书及其主旨地,对上述的实施方式以各种方式进行省略、置换、变更。
附图标记说明
1:晶圆处理系统;40:蚀刻装置;110:第一喷嘴;120:第二喷嘴;D:器件层;E1:蚀刻液;E2:清洗液;S:支承晶圆;T:重合晶圆;W:处理晶圆。
- 基板用清洗件、基板清洗装置、基板处理装置、基板处理方法以及基板用清洗件的制造方法
- 基板液处理装置、基板液处理方法以及基板处理装置