柔性多线圈跟踪传感器
文献发布时间:2023-06-19 12:25:57
本申请要求以下申请的权益:(i)2019年1月25日提交的名称为“Registration offrames of reference”的美国临时申请62/797,091,其公开内容以引用方式并入本文;以及(ii)2019年1月25日提交的名称为“Flexible multi-coil tracking sensor”的美国临时申请62/797,118,其公开内容以引用方式并入本文。
技术领域
本发明涉及用于医学规程诸如耳鼻喉科的外科规程的跟踪系统。
背景技术
美国专利申请公布2010/0274124描述了用于导航患者的区域的外科导航系统,该外科导航系统可包括非侵入性动态参考系和/或基准标记、传感器尖端器械和隔离器电路。还提供了确定动态参照系的位置的方法。
发明内容
根据本发明的一些实施方案,提供了包括基板的设备。该基板包括多个较宽部分和一个或多个柔性较窄部分,多个较宽部分被配置为经由相应的粘合剂材料片粘附到受试者的身体。柔性较窄部分中的每个柔性较窄部分将较宽部分中的相应的一对连续的较宽部分彼此连接,并且被配置为响应于该对较宽部分中的任一个较宽部分的移动而挠曲。该设备还包括多个线圈,该多个线圈分别耦接到较宽部分。
在一些实施方案中,设备还包括粘合剂材料片。
在一些实施方案中,基板包含聚酰亚胺。
在一些实施方案中,较宽部分由两个较宽部分组成。
在一些实施方案中,较宽部分包括三个较宽部分。
在一些实施方案中,在不存在施加到基板的任何力的情况下,线圈是非共线的。
在一些实施方案中,较窄部分中的每个较窄部分是U形的。
在一些实施方案中,线圈是平面的。
在一些实施方案中,线圈包括涂覆基板的相应迹线。
根据本发明的一些实施方案,还提供了一种设备,该设备包括:多个基板,该多个基板被配置为经由相应的粘合剂材料片粘附到受试者的身体;以及多个线圈,该多个线圈分别耦接到基板。
在一些实施方案中,设备还包括粘合剂材料片。
在一些实施方案中,基板由两个基板组成。
在一些实施方案中,基板包括三个基板。
在一些实施方案中,线圈是平面的。
在一些实施方案中,设备还包括一个或多个柔性连接器,该柔性连接器中的每个柔性连接器:
将基板中的相应的一对连续基板彼此连接,并且
被配置为响应于该对基板中的任一个基板的移动而挠曲。
在一些实施方案中,当没有力施加到基板中的任一个基板时,线圈是非共线的。
在一些实施方案中,连接器包括相应的弹簧。
在一些实施方案中,连接器包括相应的弹性条。
根据本发明的一些实施方案,还提供了一种便于对受试者的身体的一部分进行外科手术的方法。该方法包括接收由磁场在耦接到受试者的身体的该部分的多个线圈中感应的相应信号。该方法还包括在初始时间,基于信号,计算线圈相对于彼此的初始相对姿态。该方法还包括:在初始时间之后,基于信号重复地确定线圈处于初始相对姿态,以及响应于确定线圈处于初始相对姿态,计算身体的该部分的姿态,以及响应于所计算的姿态,执行动作以便于外科手术。该方法还包括:在后续时间,基于信号,确定线圈不在初始相对姿态,以及响应于确定在后续时间线圈不在初始相对姿态,停止外科手术。
在一些实施方案中,
外科手术由机器人使用工具执行,
执行动作包括向机器人传送移动工具的指令,并且
停止外科手术包括通过指示机器人停止执行外科手术来停止外科手术。
在一些实施方案中,该方法还包括响应于确定线圈不处于初始相对姿态,生成指示线圈不处于初始相对姿态的警报。
在一些实施方案中,使用工具执行外科手术,并且执行该动作包括将表示工具的图标叠加在受试者的身体的该部分的扫描上。
在一些实施方案中,停止外科手术包括通过生成指示线圈不处于初始相对姿态的警报来停止外科手术。
结合附图,通过以下对本发明的实施方案的详细描述,将更全面地理解本公开,其中:
附图说明
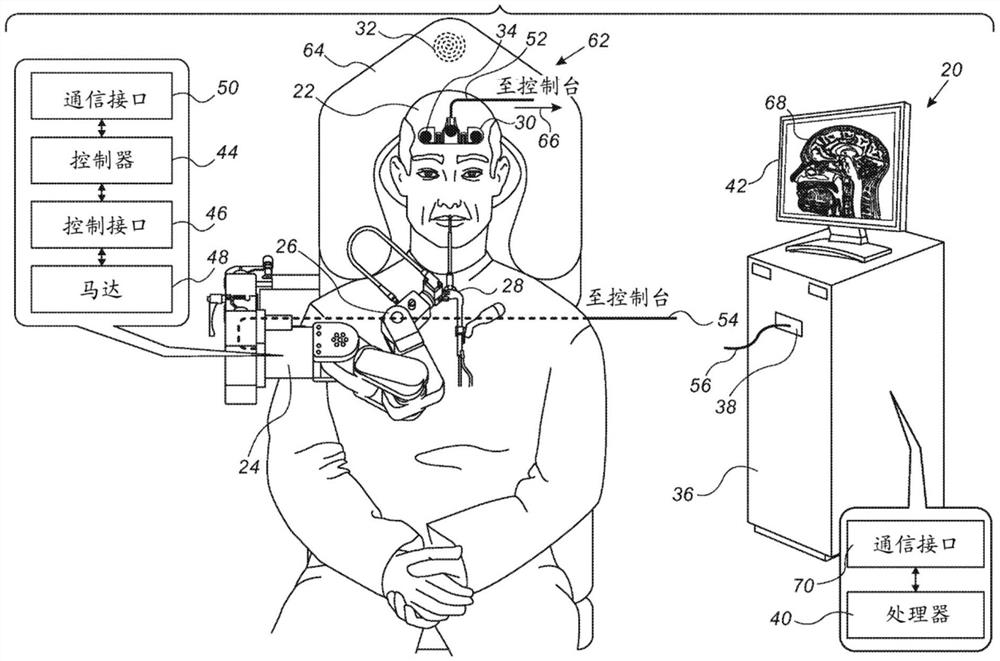
图1为根据本发明的一些实施方案的用于对受试者执行机器人外科手术的系统的示意图;
图2A是根据本发明的一些实施方案的传感器的第一表面的示意图;
图2B是根据本发明的一些实施方案的传感器的第二表面的示意图;
图3是根据本发明的一些实施方案的传感器的示意图;并且
图4是根据本发明的一些实施方案的便于机器人手术的示例性算法的示意图。
具体实施方式
在包括权利要求在内的本专利申请的上下文中,受试者的“姿态”是指受试者的位置和受试者的取向的组合。因此,例如,在三维设定中,对象的姿态可由描述对象位置的位置向量(x,y,z)以及描述对象取向的取向向量(x’,y’,z’)来描述。(通常,取向向量被归一化以便为单位长度。)
一些外科规程利用电磁跟踪系统来在规程期间跟踪受试者和/或至少一个外科工具的姿态。此种跟踪系统可包括位于不同相应位置处的多个生成线圈,以及用作跟踪传感器的一个或多个感测线圈。生成线圈在不同的相应频率下生成磁场。当感测线圈在存在该复合磁场的情况下移动时,在感测线圈中感应的电压随其相应姿态而变化。因此,基于这些感应电压,处理器可确定感测线圈的相应姿态,并因此确定受试者的姿态或工具的姿态。
例如,对于耳鼻喉科外科规程,可将包括多个线圈的跟踪传感器耦接到受试者的前额。在规程之前,可记录跟踪传感器相对于受试者的颅骨的姿态。随后,在规程期间,基于在跟踪传感器中感应的电压,可对跟踪传感器的姿态进行跟踪。基于跟踪传感器的姿态,处理器可跟踪受试者的颅骨的姿态,前提条件是传感器不相对于颅骨移动。
前述跟踪传感器的一个可能的实施方案是三轴传感器(TAS),其包括沿不同的相应轴取向的三个筒形线圈的刚性单元。然而,此类实施方案的缺点是受试者的皮肤的移位可能导致全部三个线圈一前一后地移动。如果发生此类移动,则处理器可能不正确地计算颅骨的姿态。
因此,代替TAS,本发明的实施方案提供了柔性多线圈跟踪传感器,该柔性多线圈跟踪传感器包括凭借传感器的柔性而相对于彼此可变地设置的三个线圈,其可被称为单轴传感器(SAS)。在规程之前,传感器耦接到受试者的前额,并且记录线圈相对于彼此的相应姿态。随后,在规程期间,处理器监测线圈的相对姿态。如果相对姿态中的任一个相对姿态改变(即,如果一个线圈相对于另一个线圈的位置和/或取向改变),则处理器生成指示受试者皮肤的可能移位的警报。响应于该警报,操作医师可反转移位。
在一些实施方案中,跟踪传感器包括柔性电绝缘基板,诸如柔性聚酰亚胺基板,该柔性电绝缘基板包括通过两个柔性较窄部分彼此连接的三个较宽部分。线圈由分别涂覆较宽部分的相应迹线形成。(迹线可例如通过蚀刻或溅射规程形成。)然而,较宽部分使用合适的粘合剂(例如,双面医用胶带)耦接到受试者的前额,而较窄部分不耦接到受试者的前额。因此,随着受试者的皮肤移位,较窄部分的形状可改变,使得线圈的相对姿态可改变。
在其他实施方案中,传感器包括三个电绝缘基板,相应的线圈耦接到基板中的每个基板。在一些此类实施方案中,基板通过弹性带或条或通过弹簧彼此连接。
除了耳鼻喉科规程之外,本文所述的传感器可用于脊柱规程、胸部规程或任何其他合适类型的规程。对于这些其他规程,传感器可耦接到受试者的背部或胸部,或耦接到受试者的身体的任何其他合适的部分。
首先参考图1,其为根据本发明的一些实施方案的用于对受试者22执行机器人外科手术的系统20的示意图。
系统20包括外科机器人24,该机器人包括臂26和控制器44。控制器44被构造成通常经由控制(CTRL)接口46操作一个或多个马达48来控制臂26。臂26被配置为保持工具28,诸如抽吸工具或内窥镜。因此,通过移动臂26,控制器44可将工具28定位在受试者22的体内的任何合适姿态。例如,控制器44可将内窥镜的远侧端部定位在受试者的鼻腔内,使得内窥镜可获取腔的图像。
系统20还包括通常位于控制台36中的处理器40。控制器44响应于从处理器40接收的指令操作臂26。
从控制台36延伸至机器人24的电缆54包括向机器人输送电力的电布线。控制器44经由通信(COMM)接口50与处理器40交换通信,通信(COMM)接口可包括任何合适的电路和/或其他硬件。在一些实施方案中,通信接口50是有线通信接口;在此类实施方案中,电缆54可包括在控制器和处理器之间输送通信信号的布线。在其他实施方案中,通信接口是无线通信接口。
电缆54经由第一电接口38(例如包括端口或插座)连接至控制台36,并且经由第二电接口连接至机器人24。在一些实施方案中,电缆54的面向控制台的端部与本文所述的各种其他电缆的相应端部一起被捆扎在中央电缆56中。
系统20还包括电磁跟踪系统62。跟踪系统62包括受试者跟踪传感器30,该受试者跟踪传感器耦接到受试者的头部(例如,受试者的前额)或受试者的身体的任何其他合适部分。传感器30包括多个线圈34,这些线圈经由连接到电接口38的至少一根缆线52连接到控制台36。如下文参考图2A至图2B和图3进一步所述,线圈34耦接到受试者,使得受试者的皮肤的移位可导致线圈中的任一个线圈相对于其他线圈改变其姿态。
跟踪系统62还可包括多个(例如,在10和20之间)生成线圈32,这些生成线圈设置在受试者22附近的不同相应位置处,例如位于受试者的头部下方和/或附近的发射器垫64内。(为了便于说明,图1中仅示出一个静止线圈32。)在外科手术期间,交流电以不同的相应频率穿过生成线圈32(或穿过生成线圈的子集),使得生成线圈以不同频率生成磁场。磁场在线圈34中感应信号66。处理器经由电接口38接收由缆线52携载到控制台36的信号66。
跟踪系统62还包括耦接到工具28和/或臂26的至少一个工具跟踪传感器(未示出),该工具跟踪传感器包括一个或多个线圈。工具跟踪传感器还响应于所生成的磁场输出一个或多个信号。基于这些信号,处理器可计算工具的姿态。
如下文参考图4进一步所述,基于信号66,处理器40计算线圈相对于彼此的相对姿态。如果相对姿态没有从其初始值改变,则处理器基于信号66来计算受试者的头部的姿态。基于受试者的头部的姿态和工具的姿态,处理器控制机器人24,以便实现工具相对于受试者的头部的期望姿态。另一方面,如果相对姿态已经改变,则处理器停止外科手术,因为相对姿态的改变指示不能准确计算受试者的头部的姿态。
在另选的实施方案中,线圈34和属于工具跟踪传感器的线圈用作在线圈32中感应信号的生成线圈。基于这些感应信号,处理器计算受试者的头部的姿态和工具的姿态。
除了处理器40和电接口38之外,控制台36通常包括用于与机器人24通信的有线或无线通信(COMM)接口70。通常,控制台还包括监视器42,该监视器被配置为显示受试者的头部的术前体积扫描68,诸如计算机断层摄影(CT)扫描。使用监视器42,医师可在手术期间可视地跟踪工具28的移动,和/或例如通过绘制或移动叠加在术前扫描68上的图标来指定工具的目标姿态。
尽管图1中示出了特定外科应用,但应当注意,传感器30可用于任何合适的机器人或手动外科应用。
一般来讲,处理器40可被体现为单个处理器或一组协作式联网或集群处理器。在一些实施方案中,如本文所述,处理器40的功能性可仅以硬件例如使用一个或多个专用集成电路(ASIC)或现场可编程门阵列(FPGA)来实现。在其他实施方案中,处理器40的功能性至少部分地以软件实现。例如,在一些实施方案中,处理器40被体现为包括至少中央处理单元(CPU)和随机存取存储器(RAM)的编程数字计算装置。程序代码(包括软件程序和/或数据)被加载至RAM中以供CPU执行和处理。例如,程序代码和/或数据可以通过网络以电子形式下载至处理器。另选地或除此之外,程序代码和/或数据可以被提供和/或存储在非暂态有形介质上,诸如磁性、光学或电子存储器。此类程序代码和/或数据在被提供给处理器时,产生被配置为执行本文所述的任务的机器或专用计算机。
现在参考图2A,其是根据本发明的一些实施方案的传感器30的第一表面的示意图。现在另外参考图2B,其是根据本发明的一些实施方案的传感器30的与第一表面相背对的第二表面的示意图。
传感器30包括基板58,该基板包括多个(例如,两个或三个)较宽部分72和一个或多个柔性较窄部分74,柔性较窄部分中的每个柔性较窄部分将相应的一对连续的较宽部分72彼此连接。例如,对于包括三个较宽部分的实施方案,如图2A至图2B所示,基板58包括两个较窄部分74:一个较窄部分将左较宽部分和中间较宽部分彼此连接,另一个较窄部分将中间较宽部分和右较宽部分彼此连接。
线圈34分别耦接到基板的第一表面58a上的较宽部分。通常,如图2A所示,线圈是平面的。在其他实施方案中,线圈中的至少一个线圈为筒形线圈。
通常,对于包括三个或更多个线圈的实施方案,线圈在不存在施加到基板58的任何力的情况下是非共线的。换句话讲,当基板处于其默认静止状态时,至少一个线圈的中心不位于将至少两个其他线圈的相应中心彼此接合的(假设的)线78上。该特性可便于根据线圈的相应姿态来计算受试者头部的姿态。
在一些实施方案中,基板58包含聚酰亚胺或其上可形成迹线的任何其他电绝缘材料。在此类实施方案中,线圈34可包括涂覆基板的相应迹线76。每条迹线76包括连接到穿过线缆52(图1)的线材的端子80。通常,穿过基板58的通孔将迹线76的另一端子连接到基板的第二表面58b上的另一迹线82。迹线82连接到穿过线缆52的另一根线材。
在一些实施方案中,传感器30还包括多个粘合剂材料片84,其被配置为将较宽部分粘附到受试者的身体。(通常,片84附着到第二表面58b。)在其他实施方案中,粘合剂材料片与传感器30分开提供。在此类实施方案中,在外科手术之前,将粘合剂材料片粘附到较宽部分,然后经由粘合剂材料片将较宽部分粘附到受试者的皮肤。在外科手术之后,可将粘合剂材料片从传感器移除,然后可将传感器重复用于另一个外科规程。
有利的是,每个较窄部分74被配置为响应于较窄部分所连接的两个较宽部分中的任一个较宽部分的移动而挠曲。作为该挠曲的结果,线圈的相对姿态可改变。
例如,图2A通过虚线轮廓88示出了基板的右较宽部分的假设向右移动,例如,凭借在传感器耦接到受试者时受试者的皮肤移位。响应于该移动,将右较宽部分连接到中间较宽部分的较窄部分挠曲,使得右线圈和中间线圈之间的距离增加。
一般来讲,较窄部分74可具有适用于便于本文所述的挠曲的任何形状。例如,如图2A至图2B所示,较窄部分中的每个较窄部分可为U形。另选地,较窄部分中的至少一个较窄部分可为正弦形或弧形。在一些实施方案中,较窄部分的宽度W1小于30mm、20mm、10mm或5mm。另选地或除此之外,较宽部分的宽度可大于(例如,至少大10%、20%或30%)W1。
通常,基板58的第一表面的至少一部分被覆盖(例如,被塑料盖覆盖),使得线圈34不被看到。另选地或除此之外,基板58的第二表面可被覆盖(除了由粘合剂提供的覆盖件之外),使得迹线82被隐藏。例如,迹线82可由泡沫层和/或任何其他电绝缘材料覆盖。
现在参见图3,其是根据本发明的其他实施方案的传感器30的示意图。(图3示出了传感器的第一表面和第二表面两者。)
在一些实施方案中,代替单个基板,传感器30包括多个(例如,两个或三个)基板90,相应的线圈34耦接到每个基板90。(通常,对于包括三个或更多个线圈的实施方案,线圈是非共线的。)可与基板一起提供或与基板分开提供的多个粘合剂材料片84将基板粘附到受试者的身体。如图2A至图2B所示,传感器30的第一表面和/或第二表面可被覆盖,使得线圈34和/或迹线82不可见。
在一些实施方案中,基板90彼此不连接。在其他实施方案中,传感器30包括一个或多个柔性连接器92,诸如弹簧或弹性条或带,柔性连接器中的每个柔性连接器将相应的一对连续基板彼此连接。连接器92的功能类似于较窄部分74(图2A至图2B),因为每个连接器被配置为响应于连接器所连接的基板中的任一个基板的移动而挠曲。例如,图3通过虚线轮廓94示出了右基板的假设顺时针旋转,这凭借连接连接器的柔性导致右线圈相对于中间线圈的姿态的变化。
应当注意,将基板90彼此连接或将线圈放置在如图2A至图2B所示的单个基板上的优点是传感器30更易于处理。
现在参见图4,其是根据本发明的一些实施方案的用于便于机器人外科手术的示例性算法96的示意图。算法96由处理器40执行(图1)。
算法96从配准步骤98开始,在该配准步骤处,处理器将跟踪系统配准到术前扫描68(图1)。例如,为了将跟踪系统与受试者头部的扫描配准,医师可将设置在杆的远侧末端处的线圈跨受试者面部移动。当线圈跨面部移动时,处理器可重复计算线圈的位置,从而在跟踪系统的坐标系中采集点云。随后,处理器可使用任何合适的算法诸如迭代最近点(ICP)算法来找到将点云最佳映射到表示受试者面部的扫描的表面的转换。
随后,如上文参考图1所述,处理器连续地接收在线圈34中感应的信号66,以及在工具跟踪传感器中感应的信号。基于这些信号,处理器执行下述步骤。
具体地讲,在初始时间,处理器在初始姿态计算步骤100计算线圈相对于彼此的初始相对姿态。换句话讲,基于信号66,处理器计算线圈的相应姿态,然后从相应姿态导出初始相对姿态。例如,如果一个线圈的姿态(或“绝对姿态”)是{(x,y,z),(x',y',z'))},其中(x,y,z)是线圈的位置并且(x',y',z')是线圈的取向,并且另一个线圈的姿态是{(a,b,c),(a',b',c')},则处理器可将第一线圈相对于第二线圈的相对姿态计算为{((x-a),(y-b),(z-c)),((x'-a'),(y'-b'),(z'-c'))}。
接下来,在目标姿态接收步骤102处,处理器从医师接收工具的目标姿态。例如,如上文参考图1所述,处理器可接收叠加在术前扫描上的图标的位置。基于在配准步骤98处执行的配准,处理器将该位置转换到跟踪系统的坐标系。
(应当注意,配准步骤98、初始姿态计算步骤100和目标姿态接收步骤102可另选地以任何其他顺序执行。)
在初始时间之后,处理器重复地确定线圈处于初始相对姿态,并且响应于此,控制机器人24(图1)。
更具体地,在线圈姿态计算步骤104处,处理器首先计算线圈的绝对姿态和相对姿态。换句话讲,如上文相对于初始姿态计算步骤100所述,处理器根据信号66计算线圈的绝对姿态,然后根据绝对姿态计算相对姿态。
接下来,在检查步骤106处,处理器检查线圈是否相对于彼此处于初始相对姿态。如果是,则在头部姿态计算步骤108处,处理器基于在配准步骤98处获得的配准,根据线圈的绝对姿态计算头部的姿态。除此之外,在头部姿态计算步骤108之后或之前,处理器在工具姿态计算步骤110处基于来自工具跟踪传感器的信号来计算工具的姿态。
接下来,基于头部的姿态和工具的姿态,处理器执行动作以便于外科手术。例如,在一些实施方案中,在指令传送步骤112处,处理器向机器人传送指令以移动工具。具体地讲,处理器基于头部的当前姿态和工具的姿态来计算工具的姿态的小目标变化。然后,处理器将目标变化传送到机器人,并且机器人响应于此而通过目标变化来移动工具。这样,工具朝向目标姿态递增地移动。
(通常,必须相对于机器人的坐标系指定目标变化,使得处理器必须将跟踪系统与机器人的坐标系配准。这可例如使用ICP算法或使用美国专利申请16/211,594中所述的另选技术来完成,该专利申请的公开内容以引用方式并入本文。)
另选地或除此之外,基于头部的当前姿态和工具的姿态,处理器可将表示工具的图标叠加在术前扫描68上,以便指示工具相对于头部的姿态。因此,医师可跟踪外科手术的进展,并且对于手动执行的外科手术,将工具朝向目标姿态导航。
另选地或除此之外,基于头部的当前姿态和工具的姿态,如果工具在受试者的内部组织的特定阈值距离内,则处理器可生成警报。
另一方面,如果处理器在检查步骤106处确定线圈在任何时间都不处于初始相对姿态,则处理器不允许机器人继续外科手术。相反,响应于确定线圈不处于初始相对姿态,在外科手术停止步骤114处,处理器指示机器人停止执行外科手术。通常,在外科手术停止步骤114处,处理器还生成指示线圈不处于初始相对姿态的警报。
类似地,对于手动执行的外科手术,如果处理器确定线圈不处于初始相对姿态,则处理器可通过生成指示线圈不处于初始相对姿态的警报来停止外科手术,使得医师停止执行外科手术。
响应于上述警报,医师可使受试者的皮肤移位,使得线圈返回到其初始相对姿态。随后,在检查步骤106处,在验证线圈处于其初始相对姿态之后,处理器可恢复外科手术。另选地,处理器可将跟踪系统重新配准到术前扫描,用新的相对姿态替换线圈的初始相对姿态,然后恢复外科手术。(鉴于上述情况,需注意,在本申请(包括权利要求书)的上下文中,词语“停止”可指示临时停止或“暂停”。)
本领域技术人员应当理解,本发明不限于上文具体示出和描述的内容。相反,本发明的实施方案的范围包括上文所述的各种特征的组合与子组合两者,以及本领域的技术人员在阅读上述说明书时可能想到的未在现有技术范围内的变型和修改。以引用方式并入本专利申请的文献被视为本申请的整体部分,不同的是如果这些并入的文献中限定的任何术语与本说明书中明确或隐含地给出的定义相冲突,则应仅考虑本说明书中的定义。
- 柔性多线圈跟踪传感器
- 基于超导等安匝线圈的柔性电流传感器检定系统及方法