运算方法以及运算装置
文献发布时间:2023-06-19 12:25:57
本申请以日本专利申请2020-35205号(申请日:2020年3月2日)为基础申请来主张优先权。本申请通过参照该基础申请而包括基础申请的全部内容。
技术领域
本发明的实施方式涉及运算方法以及运算装置。
背景技术
为了针对使用了所设计的元件的电气电路来评价电气动作特性而实施了电路模拟。该电路模拟通过严密考虑了物理特性的SPICE(Simulation Program with IntegratedCircuit Emphasis:仿真电路模拟器)等电路模拟器来进行。
另外,将所设计的元件应用于汽车、航空器的情况下的温度特性等在安全保障上受到重视。因此,除了针对电气电路的电气动作特性以外,还有实施针对温度特性的温度模拟的情况。
这样的电路模拟将电气电路所具有的晶体管、电阻、电容等多个元件作为元件模型并模型化,对过渡现象进行运算。另一方面,温度模拟一般使用各元件模型的产生电力来进行运算。
可是,对于温度模拟而言,相对于各元件的响应性的时间常数而言需要足够长的时间的解析。因此,如果对于具有很多元件的电气电路的过渡现象进行严密地运算,则导致花费大量的时间。
发明内容
本发明的实施方式提供能够以更短的时间对物理模拟进行运算的运算方法以及运算装置。
本实施方式涉及的运算方法具备模型生成工序、执行处理工序以及热模型生成工序。模型生成工序生成将多个元件模型连接的电路模型,所述元件模型具有开关元件的电气特性的信息。执行处理工序使用多个元件模型的每一个的电气特性的信息,以时间序列运算产生的电力,所述电力是针对规定的时间序列的输入值,通过元件模型的开关,按每个时间步长(step)产生的电力。热模型生成工序生成根据所述元件模型的开关来输出基于累计值的输出值的热模型,所述累计值是将按每个所述时间步长产生的所述电力累计而得到的。
附图说明
图1是表示第一实施方式涉及的运算装置的构成的框图。
图2是表示模型的一个构成例的图。
图3是表示元件模型的一个例子的图。
图4是表示能够选择的多个模型的显示例的图。
图5是表示能够选择的多个元件模型被显示于监视器的例子的图。
图6是表示对于所选择的模型而言能够选择的指令值的例子的图。
图7是表示模拟中的监视器所显示的图像例的图。
图8是表示开关时的电力产生模拟结果的图。
图9是表示热模型涉及的模拟中的图像例的图。
图10是表示热模型以及高精度模型的模拟例的图。
图11是表示运算装置的运算例的流程图。
图12是表示第二实施方式涉及的运算装置的构成的框图。
图13是表示将元件模型简化了的简易模型的例子的图。
图14是表示包括机械模型在内的模型的图像例的图。
图15是表示温度模拟中的包括机械模型在内的模型的图像例的图。
图16是表示电路模型的温度模拟例的流程图。
图17是表示第三实施方式涉及的运算装置的构成的框图。
图18是表示执行处理部的动作例的流程图。
图19是表示图18的步骤S402的详细的处理例的流程图。
图20是按时间序列依次示意性地表示图19的处理例的图。
图21是表示第四实施方式涉及的运算装置的构成的框图。
图22是表示第四实施方式涉及的执行处理部的动作例的流程图。
图23是表示图22的步骤S602的详细的处理例的流程图。
具体实施方式
以下,参照附图对本发明的实施方式涉及的运算方法以及运算装置详细进行说明。其中,以下所示的实施方式是本发明的实施方式的一个例子,本发明不被限定解释为这些实施方式。另外,在本实施方式所参照的附图中,存在对同一部分或者具有相同功能的部分赋予同一附图标记或者类似的附图标记而省略其反复的说明的情况。另外,存在附图的尺寸比率为了便于说明而与实际的比率不同的情况、结构的一部分被从附图省略的情况。
(第一实施方式)
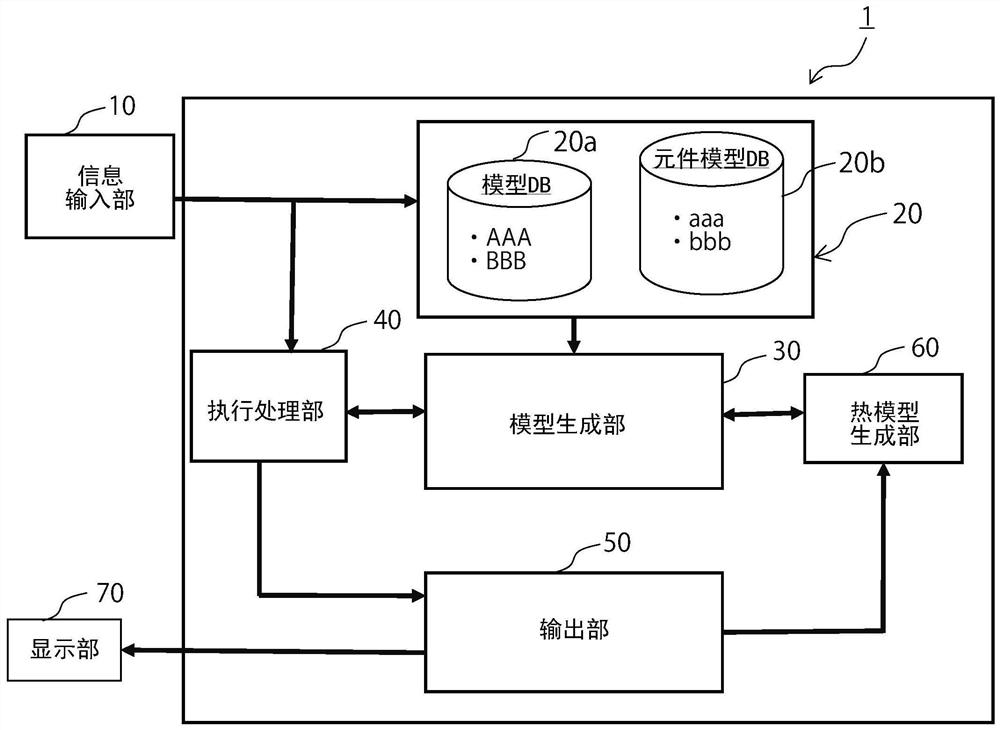
图1是表示第一实施方式涉及的运算装置1的构成的框图。如图1所示,本实施方式涉及的运算装置1例如是SPICE等,是执行电路模拟的电路模拟器装置。该运算装置1具备信息输入部10、存储部20、模型生成部30、执行处理部40、输出部50、热模型生成部60以及显示部70。这样的运算装置1例如由台式个人计算机实现。即,运算装置1例如构成为包括CPU(Central Processing Unit)。
信息输入部10例如具备键盘6或点击设备(Pointing device)等,将与使用运算装置1的用户的操作对应的指示信号输出至存储部20、模型生成部30以及执行处理部40。例如,信息输入部10输出的指示信号具有作为构成电路模型的指示信息的电路信息、作为构成元件模型的指示信息的部件信息、以及作为执行电路模拟的条件的解析设定信息中的任意一个。关于信息输入部10的指示动作的详细情况,将使用图4至图6在后面叙述。
存储部20例如由HDD(硬盘驱动器)或SSD(固态驱动器)等构成。存储部20具有模型数据库20a和元件模型数据库20b。模型数据库20a存储有多个模型80的信息。元件模型数据库20b存储有构成模型80的多个元件模型88。另外,存储部20存储有用于执行模拟的各种程序。由此,运算装置1例如通过执行存储于存储部20的程序来构成各部。此外,本实施方式涉及的各部通过执行存储于存储部20的程序而构成,但并不限定于此。例如,也可以由电路构成模型生成部30、执行处理部40、输出部50以及热模型生成部60。
图2是表示模型80的一个构成例的图。如图2所示,模型80例如是使马达进行旋转的逆变器装置的模型。该模型80是由成为模拟对象的逆变器装置的特性信息构成的模型。该模型80例如具有电路模型82、指令值输入部84以及控制模型86。电路模型82具有多个元件模型(详细模型)88和马达模型(动作模型)90。模型80的详细情况将后述。
模型生成部30根据从信息输入部10输入的信息来构成模型80。另外,模型生成部30根据被输入的信息来构成模型80内的元件模型88。例如,模型80内的元件模型88能够根据来自信息输入部10的输入而变更。
执行处理部40使用所构成的模型80的信息,按每个计算步骤运算各元件模型88以及模型80内的布线的电流、电压。该执行处理部40例如按照每个计算步骤,来运算遵照基尔霍夫等物理法则的1阶线性微分方程式、2阶线性微分方程式等电路方程式,并运算电流、电压的每个计算步骤的过渡响应。
输出部50将执行处理部40的执行处理结果按每个计算步骤存储,并输出至热模型生成部60。即,输出部50具有辅助存储部。该辅助存储部例如由HDD(硬盘驱动器)或SSD(固态驱动器)等构成。另外,输出部50生成显示图像并输出至显示部70。
热模型生成部60对由元件模型88的开关产生的电力进行累计,生成对与元件模型88每次开关时产生的产生电力对应的值进行表示的热模型作为动作模型。热模型生成部60的详细内容也将后述。
本实施方式涉及的详细模型是定义了各部件的物理特性的模型。详细模型例如是在还能够运算过渡响应等的计算步骤中能够动作的模型。此外,在本实施方式中,存在将详细模型称为高精度模型的情况。
本实施方式涉及的简易模型是将详细模型简化后的模型,例如是将详细模型的响应特性以更长的时间间隔进行了平均化而成的模型。因此,简易模型的计算步骤能够构成得比详细模型的计算步骤的间隔长。
本实施方式涉及的动作模型是使详细模型的物理特性特征化为特定的物理现象而简化的模型。动作模型的计算步骤能够构成为比详细模型的计算步骤的间隔长,并能够构成为比简易模型的计算步骤的间隔短。
显示部70例如是监视器。该显示部70对从输出部50输入的图像信息进行显示。
这里,对模型80的详细情况进行说明。如图2所示,电路模型82具有构成电路的部件的电气特性的信息。电路模型82例如具有多个元件模型88和马达模型90。元件模型88例如具有电阻元件、电容元件(电容器)、在磁场蓄积能量的无源元件(线圈)以及有源元件即开关元件(例如MOSFET)的连接关系的信息、和各自的电气特性的信息。元件模型88的详细情况将后述。
马达模型90具有马达的电气特性的信息。例如,在马达模型90中规定有被供给的电流以及电压与所产生的马达转矩的关系等信息。由此,若对马达模型90供给例如时间序列的电流值以及电压值,则输出时间序列的马达转矩。
指令值输入部84输入用于使模型80动作的时间序列的指令值。例如在模型80是逆变器装置的情况下,指令值是使其产生时间序列的马达转矩的控制值。其中,在模型80是逆变器装置的情况下,还包括未图示的电源模型。该指令值以及马达转矩的值例如可以是从实际机器等取得的实际数据。或者,也可以是通过如后述那样与机械模型的连动而运算出的模拟值。由此,能够按每个计算步骤使用控制指令值来运算使模拟对象的逆变器装置产生马达转矩之时的电气以及电压值。即,本实施方式中,使时间序列的马达转矩产生的时间序列的指令值、和使时间序列的马达转矩产生的电流值以及电压值的关系成为动作模型。
控制模型(动作模型)86是进行控制装置的动作的模型,上述控制装置根据时间序列的指令值来控制模型80。控制模型86具有控制装置内的电路构成的信息,在对控制模型86输入了时间序列的指令值的情况下,能够输出向模型80内的各构成要素的控制信号。例如在模型80是逆变器装置的情况下,若使时间序列的马达转矩产生的时间序列的控制值被输入至控制模型86,则控制模型86控制各模型元件88的开关定时以便产生该时间序列的马达转矩。该情况下,从电源模型供给电力。
图3是表示元件模型88的一个例子的图。如图3所示,元件模型88例如是作为有源元件的MOSFET的模型。在元件模型88例如是作为有源元件的MOSFET的模型的情况下,规定了氧化膜的静电电容Cgs、Cgd、内置二极管的耦合电容Cds、开关时间的信息、阈值电压VGS(th)等用于运算MOSFET的过渡响应的信息,作为电气特性。
元件模型88中除了有源元件之外,还包括作为无源元件的电阻元件、电容元件(电容器)、在磁场蓄积能量的无源元件(线圈)等。这些无源元件的信息被规定为电阻值、电容值、电感。
这里,使用图4至图6对信息输入部10的指示动作的详细情况进行说明。
图4是表示能够选择的多个模型80被显示于显示部70的监视器700的例子的图。
运算装置1的输出部80在开始模拟前使已经定义了电气特性的多个模型80显示于显示部70的监视器700。操作者经由信息输入部10来选择成为模拟对象的模型80。模型生成部30从存储部20取得所选择的模型80的信息,生成模型80。由此,操作者能够简易地构成成为模拟对象的装置整体的模型。
图5是表示对于所选择的模型80而言能够选择的多个元件模型88被显示于监视器700的例子的图。框70a内示出了能够选择的多个元件模型88。
在开始模拟前,输出部80使已经定义了电气特性的多个元件模型88显示于显示部70的监视器700。操作者经由信息输入部10来选择成为模拟对象的元件模型88。例如,首先指示图2中示出的模型80内的元件模型88。接着,操作者经由信息输入部10而指示显示于监视器700的元件模型88。由此,能够置换元件模型88。
另外,操作者也能够在选择图5中所示的元件模型之前,将通过信息输入部10操作位置的标记配置到元件模型88上,从而使元件的电气特性显示在监视器700上。例如,如果元件模型是MOSFT,则所设定的氧化膜的静电电容Cgs、Cgd、内置二极管的耦合电容Cds、开关时间的信息、阈值电压VGS(th)等被显示在监视器700上。
另外,操作者也能够将新设计的元件模型88的电气特性的信息登记到元件模型数据库20b。由此,输出部80可使新设计的元件模型88作为能够选择的元件模型88而显示于显示部70的监视器700。因此,操作者还能够选择新设计出的元件模型88,能够通过更简易的操作来模拟新设计出的元件模型88的电气以及温度特性。
图6是表示对于所选择的模型80而言能够选择的指令值的例子的图。框70b内示出能够选择的多个指令值700b。
在开始模拟前,输出部80使能够选择的多个指令值700b显示于显示部70的监视器700。操作者经由信息输入部10而选择成为模拟对象的指令值700b。
图7是表示模拟中的监视器700所显示的图像例的图。若根据上述的说明选择了模型80等,则例如图7中所示的图像被显示于监视器700。
框70c是表示模拟中的元件模型例的框。如上述那样,元件模型88中存在高精度模型(详细模型)、热模型(动作模型)、简易模型等多个种类,通过将正使用的模型的种类明示,能够容易地判断模拟的种类。这里,高精度模型是根据所规定的电气特性来运算过渡现象的模型。高精度模型被用于通常的电气特性的模拟。热模型是将热的产生状况模型化而得到的模型,被用于温度特性的模拟。简易模型是在后述的机械模型的特性模拟中使用的高精度模型的简单化模型。简易模型例如是具有元件的电阻值信息的开关模型。
在框70b内显示输入中的指令值和模拟结果。在模型80是逆变器装置的情况下,指令值700b是用于产生马达转矩的控制指令值。横轴表示时间,纵轴表示控制指令值。箭头700c表示了对元件模型88使用高精度模型的第一期间。
模拟结果例如是每个元件模型88的温度变化。横轴表示时间,纵轴表示温度。为了获得用于生成热模型(动作模型)的信息而进行使用了高精度模型的模拟。
再次返回至图1,并参照图8对热模型生成部60的详细情况进行说明。对于图8而言,右侧的图是表示高精度模型中的开关时的电力产生模拟结果的图。左侧的图是表示热模型中的开关时的电力产生模拟结果的图。表示了与元件模型88连接的电抗为10nH的情况和电抗为30nH的情况。
从上方起表示了作为对元件模型88的规定输入的、漏极电流Id、漏极源极间电压Vds、栅极源极间电压Vgs、产生电力Power。横轴为时间,纵轴分别是漏极电流Id、漏极源极间电压Vds、栅极源极间电压Vgs、产生电力Power。
各元件模型88的电力产生状况根据元件模型88的组合、无源元件、电阻、电容器、线圈的组合等而变化。因此,由于为了分析电力产生状况而需要严密模拟过渡现象,所以使用高精度模型。
另一方面,产生电力Power的时间变化的形状展现出不变化的倾向。如图8所示,例如,根据开关的时机,产生电力Power的时间变化展现出尖刺(spike)状的形状。即使漏极电流Id、漏极源极间电压Vds、栅极源极间电压Vgs的大小变动,该尖刺状的形状也被维持。即,如果漏极电流Id、漏极源极间电压Vds、栅极源极间电压Vgs的大小发生变动,则将尖刺状的形状维持为相似状,尖刺的高度取决于漏极电流Id、漏极源极间电压Vds、栅极源极间电压Vgs的大小而变化。
元件模型88的温度根据产生电力Power的累计值而变化。因此,MOSFET等有源元件的温度特性的模拟是通过运算根据开关的定时而产生的产生电力Power来模拟的。
另一方面,温度变化的时间常数比有源元件的时间常数变大。因此,在温度特性的模拟中,虽然取决于尖刺状的形状的累计值,但展现出不取决于形状的倾向。关注到这样的特性,本实施方式涉及的热模型生成部60生成与高精度模型的产生电力对应的热模型。
即,首先在元件模型88的高精度模型中,严密模拟尖刺状的形状。接下来,热模型生成部60运算尖刺状的形状部分的累计值,决定与累计值成比例的代表值。例如,运算将累计值除以规定时间而得到的值作为代表值。或者,将累计值的值本身作为代表值。
如上述那样,左图的最下部的图是表示热模型的累计电力的输出例的图。这样,在热模型中,输出根据开关的定时而具有四边形状的面积的电力值作为输出值。根据漏极电流Id、漏极源极间电压Vds、栅极源极间电压Vgs来线性运算该四边形的高度。例如,根据漏极电流Id、漏极源极间电压Vds、栅极源极间电压Vgs以线性成比例的方式运算四边形的高度。这样,在热模型中,通过使用了代表值的线性运算,输出与漏极电流Id、漏极源极间电压Vds、栅极源极间电压Vgs对应的输出值。换言之,在热模型中,将输入输出关系数字化来进行处理。由此,在温度特性的模拟中,取代有源元件的严密的模拟,能够根据漏极电流Id、漏极源极间电压Vds、栅极源极间电压Vg而更高速地输出与高精度模型同等的产生电力Power的累计值。这样,由于通过与规定的输入值对应的线性运算,以数字方式输出与高精度模型相同的产生电力Power的累计值,所以可降低计算机的计算负荷,使计算机的计算速度更高速化。
另外,在温度模拟中,无源元件产生与电流的平方成比例的热。因此,在无源元件中,在温度模拟的情况下也可使用通常的元件模型。
图9是表示在热模型涉及的模拟中使监视器700显示的图像例的图。热模型生成部60在开始温度特性的模拟且基于高精度模型的严密的模拟结果被蓄积到输出部50的定时,生成热模型。接下来,热模型生成部60将元件模型88从高精度模型置换为热模型。若被置换为热模型,则框70c内被变更为表示正在使用热模型这一情况的显示。箭头700e表示使用热模型的第二期间。第二期间700e被设定得比第一期间700c长。由此,与通过高精度模型运算第二期间的情况相比,可进一步缩短运算时间。
图10是表示将使用了热模型的模拟与使用了高精度模型的模拟进行比较显示的例子的图。横轴表示时间,纵轴表示元件模型的温度。这样,在使用了热模型的情况下,也能够获得与使用了高精度模型的情况同等的模拟结果。由此,在使用了高精度模型的温度特性的模拟中,需要10小时数量级的计算机负荷,但通过使用热模型,能够以几分钟数量级的计算机负荷来运算相同的结果。
图11是表示运算装置1的运算例的流程图。如图11所示,首先,操作者经由信息输入部10输入成为温度模拟对象的高精度模型的信息(步骤S100)。
接下来,模型生成部30基于被输入的信息,生成对元件模型88使用了高精度模型而得到的模型(步骤S102)。
接下来,执行处理部40根据所设定的时间序列的指令值,使用高精度模型来运算每个计算步骤的过渡响应(步骤S104)。
接下来,执行处理部40判断所设定的第一期间是否结束(步骤S106)。在未结束的情况下(步骤S106的否),反复进行从步骤S104起的处理。
另一方面,执行处理部40在判断为第一期间结束的情况下(步骤S106的是),将输出部50中蓄积的数据输出给热模型生成部60,热模型生成部60生成热模型(步骤S108)。接着,热模型生成部60将高精度模型置换为热模型。
接下来,执行处理部40根据所设定的其余的时间序列的指令值,使用热模型来预算每个计算步骤的温度响应(步骤S110)。
接下来,执行处理部判断所设定的第二期间是否结束(步骤S112)。在未结束的情况下(步骤S112的否),反复进行从步骤S112起的处理。
另一方面,执行处理部40在判断为第二期间结束的情况下(步骤S106的是),使输出部50生成对每个元件模型88的温度的时间变化进行表示的显示方式,并在使显示部70显示之后结束整体处理。
如以上说明那样,根据本实施方式,执行处理部40使用元件模型88的电气特性的信息,按时间序列运算如下电力,即:针对输入值(驱动电压以及驱动电流值),通过元件模型88的开关,按每个时间步长产生的电力。然后,热模型生成部60基于对按每个时间步长产生的电力进行累计而得到的累计值,生成与规定的输入值(驱动电压以及驱动电流值)相应地输出由元件模型88的开关产生的产生电力的热模型。
由于元件模型88的高精度模型中的产生电力的累计值根据输入值而线性变更,所以热模型能够根据输入值而线性运算由元件模型88的开关产生的产生电力。由此,由于热模型通过与规定的输入值对应的线性运算来以数字方式输出与高精度模型相同的产生电力Power的累计值,所以可降低计算机的计算负荷,计算机的计算速度进一步高速化。
(第二实施方式)
第二实施方式涉及的运算装置1与第一实施方式涉及的运算装置1的不同点在于,模型生成部30能够生成进行机械式动作的机械模型。以下,对与第一实施方式涉及的运算装置1的不同的点进行说明。
图12是表示第二实施方式涉及的运算装置1的构成的框图。如图12所示,本实施方式涉及的运算装置1能够生成机械模型。更具体而言,存储部20还具有机械模型数据库20c和机械部件数据库20d。其中,本实施方式涉及的各部通过执行存储于存储部20的程序而构成,但并不限定于此。例如,也可以进一步通过电路来构成后述的简易机械模型生成部75。
另外,元件模型数据库20b还存储有将元件模型88简化后得到的简易模型。
图13是表示将元件模型88简化后得到的简易模型88a的例子的图。对于作为有源元件的一个例子的MOSFET等而言,如果以更大的时间常数进行近似,则能够通过无源元件的组合来表示。因此,简易模型88a如上述那样,能够由具有元件的电阻值信息的开关模型构成。
机械模型数据库20c存储多个机械模型(详细模型)92的信息。机械部件数据库20d存储机械模型92内的机械部件的信息。由此,模型生成部30能够根据信息输入部10的输入而生成例如与电路模型(简易模型)82协作动作的机械模型92。另外,模型生成部30能够根据信息输入部10的输入而置换机械模型92内的机械部件94。机械部件94例如是齿轮、方向盘、轮胎等。
简易机械模型生成部75生成与机械模型92相关的动作模型。例如,后述的马达模型90的时间序列的马达转矩700g和使马达转矩700g产生的指令值700b成为与机械模型92相关的动作模型。电路模型82与机械模型92的时间常数大幅度不同,如果对机械模型92的模拟使用电路模型82的高精度模型,则导致花费不现实的计算时间。鉴于此,在进行机械模型92的模拟的情况下,使用简易模型88a。另一方面,在进行电路模型82的模拟的情况下,使用将机械模型92的动作简易表现的简易机械模型(动作模型)例如时间序列的马达转矩700g和使马达转矩700g产生的指令值700b,断开机械模型92来进行模拟。
图14是对模拟中的监视器700所显示的包括机械模型92在内的模型80的图像例进行表示的图。如上述那样,框70c是表示模拟中的元件模型例的框,表示为是正在使用简易模型中。即,是正在模拟机械模型92的动作中。模拟机械模型92的动作的计算步骤的长度,与模拟电路模型80时的计算步骤的时间相比,例如被设定得长100倍左右。
如图14所示,机械模型92例如是被逆变器装置的电路模型82所驱动的汽车的方向盘辅助驱装置的模型。
在图14中,对模型80的输入指令值是时间序列的汽车的方向盘的角度700f。机械模型92的响应时间的时间常数是与电路模型82的时间常数相比相当大的时间常数。因此,如上述那样,将运算机械模型92时的元件模型88变更为简易模型。由此,能够更高速地运算。
即,机械模型92以时间序列的汽车的方向盘的角度700f为输入,且作为模拟的结果而输出对方向盘进行辅助驱动时所需的马达模型90的时间序列的马达转矩700g和产生马达转矩700g的指令值700b。
简易机械模型生成部75通过样条模型(spline model)等来近似马达转矩700g和指令值700b。由此,生成比机械模型92的计算步骤短1/100倍左右的、与电路模型80的计算步骤对应的马达转矩700g和指令值700b作为动作模型。
接下来,执行处理部40使用简易机械模型生成部75生成的指令值700b和马达转矩700g来执行与第一实施方式同样的温度模拟。
图15是对电路模型82的温度模拟中的监视器700所显示的包括机械模型92在内的模型80的图像例进行表示的图。如上述那样,框70c是表示模拟中的元件模型例的框,示出了热模型正在使用中。即,是电路模型82的温度正在模拟中。
由于电路模型82与机械模型92的计算步骤的长度不同,所以例如在电路模型82的温度模拟中,断开机械模型92来进行模拟。因此,与机械模型92协作动作的马达模型90的马达转矩使用马达转矩700g。
图16是表示与机械模型92协作动作的电路模型82的温度模拟例的流程图。如图16所示,首先,操作者经由信息输入部10输入成为温度模拟对象的机械模型92和电路模型82的信息(步骤S300)。
接下来,模型生成部30基于被输入的信息来生成对元件模型88使用了简易模型而得到的模型80(步骤S302)。
接下来,执行处理部40根据所设定的时间序列的指令值,使用简易模型来将每个第一计算步骤的马达转矩700g和指令值700b输入至输出部50并存储(步骤S304)。
接下来,执行处理部40判断所设定的期间是否结束(步骤S306)。在未结束的情况(步骤S306的否)下,反复进行从步骤S304起的处理。
另一方面,执行处理部40在判断为期间结束的情况(步骤S306的是)下,将所蓄积的数据从输出部50输出至简易机械模型生成部75,简易机械模型生成部75生成每个第二计算步骤的马达转矩700g和指令值700b(步骤S108)。第二计算步骤例如是第一计算步骤的100分之1的时间。接着,热模型生成部60将高精度模型置换为热模型(步骤S310)。
接下来,执行处理部40根据所设定的时间序列的指令值700b和马达转矩700g,使用热模型来运算每个计算步骤的温度响应(步骤S320)。
接下来,执行处理部判断所设定的第二期间是否结束(步骤S322)。在未结束的情况(步骤S332的否)下,反复进行从步骤S320起的处理。
另一方面,执行处理部40在判断为第二期间结束的情况(步骤S322的是)下,使输出部50生成对每个元件模型88的温度的时间变化进行表示的显示方式,并在使显示部70显示之后结束整体处理。
如以上说明那样,根据本实施方式,首先使用电路模型82的简易模型通过第一计算步骤来模拟机械模型92的动作,并存储机械模型92向控制模型86输出的时间序列的指令值700b和马达转矩700g。接着,与第二计算步骤对应地使简易机械模型生成部75生成时间序列的指令值700b和马达转矩700g。然后,使用与第二计算步骤对应的时间序列的指令值700b和马达转矩700g,通过第二计算步骤来进行电路模型82的温度模拟。由此,能够以更短的时间来运算与计算步骤的数量级相差100倍左右的机械模型92协作动作的电路模型82的温度模拟。
(第三实施方式)
第三实施方式涉及的运算装置1与第二实施方式涉及的运算装置1的不同点在于,模型生成部30还具有从多个模型之中自动地生成动作模型的功能。以下,对与第一实施方式涉及的运算装置1的不同点进行说明。
图17是表示第三实施方式涉及的运算装置1的构成的框图。如图17所示,本实施方式涉及的运算装置1能够使用多个模型自动地生成动作模型,具备动作模型生成部100。
存储部20例如具有多个模型20e~20g。多个模型20e~20g是物理模型,具有与时间响应性相关的信息、详细模型以及简易模型。即,在初始状态下,不生成动作模型。
动作模型生成部100使用模型20e~20g的详细模型和简易模型来生成与目的对应的动作模型。
如上述那样,本实施方式涉及的详细模型是定义了各部件的物理特性的模型,例如还能够运算过渡响应等。简易模型是将详细模型简化了的模型,例如是将详细模型的响应特性以更长的时间间隔进行了平均化的模型。动作模型例如是将详细模型的响应特性以更长的时间间隔且比简易模型短的间隔进行了平均化的、与特定的物理现象对应的模型。
例如,模型20e是电路模型。模型20e的详细模型是将具有开关元件的电气特性的信息的多个元件模型连接而成的电路模型。该详细模型还能够运算开关元件的过渡响应等。模型20e的简易模型例如是将详细模型的响应特性以更长的时间间隔平均化、并以电阻特性表示元件模型内的开关元件的电气特性的模型。模型20e的动作模型例如是根据元件模型的开关来输出热的热模型。但是,如上述那样,热模型为“null”状态,在初始状态中不被生成。
模型20e的详细模型的时间响应性例如为100纳秒,模型20f的详细模型的时间响应性例如为0.1秒,时间数量级相差几个数量级。同样,模型20g的详细模型的时间响应性例如与模型20f的详细模型的时间响应性相比,相差几个时间数量级地变大。
这样,若将时间数量级不同的详细模型连结来生成物理模型,则如上述那样,时间响应性短的详细模型成为模拟时间的限制(日语:律速),模拟时间变得不现实。鉴于此,在本实施方式涉及的执行处理部40中,根据详细模型的时间响应性来将详细模型、简易模型组合,首先生成作为目标的动作模型。
图18是表示执行处理部40的动作例的流程图。如图18所示,首先,执行处理部40决定系统中的想要观测的特性(步骤S400)。想要观测的特性例如是驱动马达的电路的热特性。
接下来,动作模型生成部100为了能够实现更长时间的观察而生成与想要观测的特性对应的动作模型(步骤S402)。在生成动作模型的步骤中,动作模型生成部100根据多个详细模型的响应时间来生成动作模型。生成动作模型的步骤的详细情况将使用图19以及图20在后面叙述。
接下来,使用所生成的动作模型通过模拟来运算想要观测的特性(步骤S404)。这样,通过生成与想要观测的特性对应的动作模型,并进行更高效的模拟,能够以更短的时间获得与想要观测的特性对应的模拟结果。
图19是表示图18的步骤S402的详细的处理例的流程图。图20是按时间序列示意性地表示图19的处理例的图。
如图19所示,执行处理部40从不具有动作模型的多个模型20e~20g之中选择响应性最大的详细模型(步骤S500)。即,如图20的S20所示,选择模型20g的详细模型。
接下来,模型生成部30如图20的S20所示生成使用了模型20g的详细模型以及模型20e、f的简易模型的第一物理模型(步骤S502)。这里,不具有动作模型的其余的模型20e、f使用简易模型。
接下来,执行处理部40进行使用了第一物理模型的模型模拟,生成用于生成模型20g的动作模型的数据(步骤S504)。接着,动作模型生成部100使用通过步骤S502获得的数据来生成模型20g的动作模型。
然后,模型生成部30如图20的S22所示,将模型20g的详细模型置换为动作模型(步骤S506)。
接下来,执行处理部40判断全部的模型是否被置换为动作模型(步骤S508)。在全部的模型未被置换为动作模型的情况(步骤S508的否)下,反复进行从步骤S500起的处理。由此,如图20的S24、S26所示,按顺序将详细模型置换为动作模型。另一方面,在全部的模型被置换为动作模型的情况(步骤S508的是)下,结束处理。
如以上说明那样,根据本实施方式,基于详细模型的时间响应性将详细模型、简易模型组合,生成作为目标的动作模型,在生成了全部的动作模型之后,进行与想要观测的特性对应的模拟。由此,能够进行更高效的模拟,以更短的时间获得与想要观测的特性对应的模拟结果。
(第四实施方式)
第四实施方式涉及的运算装置1与第二实施方式涉及的运算装置1的不同点在于,模型生成部30还具有从FET模型以及机械模型之中自动地生成动作模型的功能。以下,对与第二实施方式涉及的运算装置1不同的点进行说明。
图21是表示第四实施方式涉及的运算装置1的构成的框图。如图3所示,本实施方式涉及的运算装置1能够使用FET模型h以及机械模型i来自动地生成动作模型,具备动作模型生成部100。动作模型生成部100具有热模型生成部60和简易机械模型生成部75。
存储部20例如具有FET模型20h和机械模型20i。FET模型20h以及机械模型20i是物理模型,具有与时间响应性相关的信息、详细模型以及简易模型。即,在初始状态中,不生成动作模型。
动作模型生成部100使用FET模型20h以及机械模型20i的详细模型和简易模型,来生成与目的对应的动作模型。FET模型20h的详细模型例如具有电阻元件、电容元件(电容器)、在磁场中蓄积能量的无源元件(线圈)以及有源元件即开关元件(例如MOSFET)的连接关系的信息、和各自的电气特性的信息。例如,具有对开关元件设定的氧化膜的静电电容Cgs、Cgd、内置二极管的耦合电容Cds、开关时间的信息、阈值电压VGS(th)等信息。FET模型20h的简易模型例如是具有元件的电阻值信息的开关模型。
机械模型20i的详细模型是进行机械式动作的模型。机械模型20i的详细模型例如是齿轮、方向盘、轮胎等机械部件的组合,对机械部件定义了动作特性。机械模型20i的简易模型是将各机械部件的动作简化了的模型,例如展现比详细模型长的计算步骤下的平均的输入输出特性。
FET模型20h的动作模型例如是根据元件模型的开关来输出热的热模型。但是,热模型为“null”状态,在初始状态下不被生成。同样,机械模型20i的动作模型例如是表示与FET模型20h的计算步骤对应的马达转矩和指令值700b的关系的模型。机械模型20i的动作模型为“null”状态,在初始状态下不被生成。
FET模型20h的详细模型的时间响应性例如为100纳秒,机械模型20i的详细模型的时间响应性例如为0.1秒。这样,FET模型20h的详细模型的时间响应性与机械模型20i的详细模型的时间响应性相比,时间数量级相差几个数量级。
如果将时间数量级不同的详细模型连结来生成物理模型,则如上述那样,时间响应性短的详细模型成为模拟时间的限制,导致模拟时间变得不现实。鉴于此,在本实施方式涉及的执行处理部40中,根据FET模型20h以及机械模型20i中的详细模型的时间响应性来将详细模型、简易模型组合,首先生成作为目标的动作模型。
图22是表示执行处理部40的动作例的流程图。如图22所示,首先,执行处理部40决定系统中的想要观测的特性(步骤S600)。想要观测的特性例如是驱动马达的FET的热特性。
接下来,动作模型生成部100为了能够实现更长时间的观察而生成与想要观测的特性对应的动作模型(步骤S602)。在生成动作模型的步骤中,动作模型生成部100根据多个详细模型的响应时间来生成动作模型。生成动作模型的步骤的详细情况将使用图23在后面叙述。
接下来,使用所生成的动作模型通过模拟来运算想要观测的特性(步骤S604)。这样,通过生成与想要观测的特性对应的动作模型,并进行更高效的模拟,能够以更短的时间获得与想要观测的特性对应的模拟结果。
图23是表示图22的步骤S602的详细的处理例的流程图。如图23所示,执行处理部40从不具有动作模型的FET模型20h以及机械模型20i之中选择响应性最大的详细模型(步骤S500)。即,选择机械模型20i的详细模型。
接下来,模型生成部30生成使用了机械模型20i的详细模型以及FET模型20h的简易模型的第一物理模型(步骤S702)。
接下来,执行处理部40进行使用了第一物理模型的模型模拟,生成用于生成机械模型20i的动作模型的数据(步骤S704)。接着,动作模型生成部100的简易机械模型生成部75使用通过步骤S704获得的数据来生成机械模型20i的动作模型作为第一动作模型(步骤S706)。
然后,模型生成部30将FET模型20h的简易模型置换为详细模型(步骤S708)。而且,进而将机械模型20i的详细模型置换为第一动作模型,生成第二物理模型(步骤S710)。
接下来,执行处理部40进行使用了第二物理模型的模型模拟,生成用于生成FET模型20h的动作模型的数据(步骤S712)。接着,动作模型生成部100的热模型生成部60使用通过步骤S712获得的数据来生成FET模型20h的热模型作为第二动作模型(步骤S714)。
然后,模型生成部30将FET模型20h的详细模型置换为第二动作模型来生成第三物理模型(步骤S716),并结束处理。
如以上说明那样,根据本实施方式,基于FET模型20h以及机械模型20i的详细模型的时间响应性将详细模型、简易模型组合,生成作为目标的动作模型,在生成了全部的动作模型之后,进行与想要观测的FET模型20h的热特性对应的模拟。由此,通过进行更高效的模拟,能够在更短的时间获得与想要观测的FET模型20h的热特性对应的模拟结果。
上述的运算装置1的至少一部分可以由硬件构成,也可以由软件构成。在由软件构成的情况下,可以将实现运算装置的至少一部分的功能的程序收纳到软盘或CD-ROM等记录介质,使计算机读入而执行。记录介质并不限定于磁盘、光盘等能够拆装的介质,也可以是硬盘部、存储器等固定型的记录介质。
另外,也可以经由因特网等通信线路(也包括无线通信)来发布实现运算装置1的至少一部分的功能的程序。并且,可以在将该程序加密、或进行调制或压缩的状态下,经由因特网等有线线路或无线线路发布,或者收纳于记录介质来进行发布。
以上,对几个实施方式进行了说明,但这些实施方式只是例示,并不意图限定发明的范围。本说明书中说明的新的装置、方法以及程序能够通过其他各种方式来实施。另外,针对本说明书中说明的装置、方法以及程序的方式,能够在不脱离发明主旨的范围内进行各种省略、置换、变更。
此外,可考虑以下的附录所记载那样的运算方法以及运算装置。
(附录1)一种运算方法,具备:
模型生成工序,生成将多个元件模型连接的电路模型,所述元件模型具有开关元件的电气特性的信息;
执行处理工序,使用所述多个所述元件模型的每一个的电气特性的信息,以时间序列运算产生的电力,所述电力是针对规定的时间序列的输入值,通过所述元件模型的开关,按每个时间步长产生的电力;以及
热模型生成工序,生成根据所述元件模型的开关来输出基于累计值的输出值的热模型,所述累计值是将按每个所述时间步长产生的所述电力累计而得到的。
(附录2)根据附录1所述的运算方法,其中,
所述热模型生成工序将所述累计值除以规定的时间而得到的值或者所述累计值作为代表值,输出基于所述代表值的所述输出值。
(附录3)根据附录2所述的运算方法,其中,
所述热模型使用所述代表值,通过与所述规定的输入值对应的线性运算,来输出所述输出值。
(附录4)根据附录1所述的运算方法,其中,
所述执行处理工序根据第一期间的时间序列的指令值,使用所述多个所述元件模型的每一个的电气特性的信息,以时间序列运算按每个时间步长产生的电力,
根据比所述第一期间长的第二期间的时间序列的指令值,使用所述热模型,以时间序列运算所述元件模型的每个时间步长的产生电力。
(附录5)根据附录4所述的运算方法,其中,
所述执行处理工序利用使用所述热模型而产生的产生电力,以时间序列运算所述元件模型的每个所述时间步长的温度。
(附录6)根据附录1至5中任意一项所述的运算方法,其中,
还具备输出工序,在所述输出工序中,生成对在所述元件模型产生的温度的时间变化进行表示的显示方式。
(附录7)根据附录1至6中任意一项所述的运算方法,其中,
能够从多个不同的电路模型中选择所述电路模型。
(附录8)根据附录1至7中任意一项所述的运算方法,其中,
能够从多个不同的元件模型中选择所述元件模型。
(附录9)根据附录1至8中任意一项所述的运算方法,其中,
所述电路模型还具有马达模型的信息,
所述模型生成工序生成被所述马达模型驱动的机械构造的机械模型。
(附录10)根据附录9所述的运算方法,其中,
在包含所述机械模型的情况下,所述执行处理工序根据时间序列的机械模型用指令值,按比所述时间步长长的每个第二时间步长,运算所述机械模型的动作。
(附录11)根据附录10所述的运算方法,其中,
所述电路模型的指令值是从所述机械模型输出的指示所述马达模型的转矩输出的转矩指示值和所述马达的马达转矩,
在运算所述转矩指示值以及所述马达转矩的情况下,所述执行处理工序将所述元件模型内的开关元件的电气特性置换为用电阻特性表示的简易模型来进行运算。
(附录12)根据附录11所述的运算方法,其中,
在运算对所述机械模型进行驱动时的所述元件模型的温度的情况下,所述执行处理工序代替所述机械模型而使用所述转矩指示值、所述马达转矩以及所述热模型来按每个所述时间步长运算温度。
(附录13)一种运算装置,其中,具备:
模型生成部,生成将多个元件模型连接的电路模型,所述元件模型具有开关元件的电气特性的信息;
执行处理部,使用所述多个所述元件模型的每一个的电气特性的信息,以时间序列运算产生的电力,所述电力是针对规定的时间序列的输入值,通过所述元件模型的开关,按每个时间步长产生的电力;以及
热模型生成部,生成根据所述元件模型的开关来输出基于累计值的输出值的热模型,所述累计值是将按每个所述时间步长产生的所述电力累计而得到的。
(附录14)一种运算方法,是使用多个详细模型和与所述多个详细模型分别对应且计算步骤的间隔比对应的详细模型长的简易模型来运算想要观测的物理特性的方法,其中,具备:
取得系统中的想要观测的物理特性的工序;
动作模型生成工序,生成与所述想要观测的物理特性对应且计算步骤的间隔比对应的详细模型长的动作模型;以及
观测工序,使用在动作模型生成工序中生成的动作模型来模拟想要观测的物理特性,
所述动作模型生成工序根据所述多个详细模型的响应时间来生成所述动作模型。
(附录15)根据附录14所述的运算方法,其中,
所述动作模型生成工序是使用多个详细模型和与所述多个详细模型分别对应的简易模型来运算与多个详细模型的至少任意一个对应的动作模型的工序,
所述动作模型生成工序具有:
第一模型生成工序,使用在所述多个详细模型之中响应时间最长的第一详细模型和与所述多个详细模型中除了所述第一详细模型以外的详细物理模型对应的各个简易模型来生成第一物理模型;
第一执行处理工序,使用所述第一物理模型,以时间序列运算按每个与所述第一详细模型的时间响应相符的时间步长产生的物理现象;以及
第一生成工序,基于按每个所述时间步长产生的所述物理现象来生成所述第一详细模型的第一动作模型。
(附录16)根据附录15所述的运算方法,其中,具有:
第二模型生成工序,至少使用所述第一动作模型和所述多个详细物理模型中响应时间第2长的第二详细模型来生成第二物理模型;
第二执行处理工序,使用所述第二物理模型,以时间序列运算按每个与所述第二详细模型的时间响应相符的时间步长产生的物理现象;以及
第二生成工序,基于按每个所述时间步长产生的所述物理现象来生成所述第二详细模型的第二动作模型。
(附录17)根据附录16所述的运算方法,其中,
使用与所述第二详细模型对应的简易模型来生成所述第二物理模型。
(附录18)根据附录17所述的运算方法,其中,具有:
第三模型生成工序,至少使用所述第一动作模型以及第二动作模型、和多个详细物理模型中响应时间第3长的第三详细模型来生成第三物理模型;
第三执行处理工序,使用所述第三物理模型,以时间序列运算按每个与所述第三详细模型的时间响应相符的时间步长产生的物理现象;以及
第三生成工序,基于按每个所述时间步长产生的所述物理现象来生成所述第三详细模型的第三动作模型。
(附录19)根据附录18所述的运算方法,其中,具有:
第四模型生成工序,至少使用所述第一动作模型、第二动作模型以及第三动作模型来生成第四物理模型;以及
第三执行处理工序,使用所述第四物理模型,以时间序列运算按每个与所述第一动作模型、第二动作模型以及第三动作模型的任意一个的时间响应相符的时间步长产生的物理现象。
(附录20)根据附录15所述的运算方法,其中,
所述第一详细模型是机械模型,所述第二详细模型是将具有开关元件的电气特性的信息的多个FET模型连接而成的电路模型,
所述第一模型生成工序使用所述机械模型和用电阻特性对所述电路模型的所述FET模型内的开关元件的电气特性进行表示的简易模型,来生成所述物理模型,
所述第一生成工序生成与所述机械模型的转矩指示值对应的马达转矩的时间序列值作为所述第一动作模型。
- 标量乘法的运算方法、幂运算的运算方法、记录有标量乘法的运算程序的记录介质及记录有幂运算的运算程序的记录介质
- 运算装置、运算方法及记录了该运算方法的记录媒体