一种建筑机器人测距测量装置
文献发布时间:2023-06-19 12:27:31
技术领域
本发明涉及建筑机器人技术领域,具体涉及一种建筑机器人测距测量装置。
背景技术
机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动;它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作;目前,建筑建设上测距测量标识上,还是沿用人工方式进行测量、画线,造成测距效率低、精确度不高。
发明内容
针对上述现有技术存在的问题,本发明提供一种建筑机器人测距测量装置,通过角度检测组件对旋转角度的控制,实现测距测量出预设规划建设尺寸,通过位移检测模块一与位移检测模块二之间的距离检测,在测绘出实际距离后,通过标记电机旋转标记轮,在通过滑动导杆伸出,使得标记轮按压至地面,进行标记处测绘最终距离,实现了精确、快速的测距测量技术。
为了实现上述目的,本发明通过以下技术方案实现:一种建筑机器人测距测量装置,包括支撑架、控制箱、角度检测组件和旋转转盘组件,所述角度检测组件包括角度检测板一、角度检测板二和角度检测板三,所述旋转转盘组件包括旋转盘一、旋转盘二和旋转盘三,所述支撑架的底部固定连接旋转盘一的上部,所述旋转盘一的底部转动连接角度检测板一的上部,所述角度检测板一的底部固定连接驱动轮,所述旋转盘一的一侧螺纹连接有传感器T,所述角度检测板一的上部周向均匀卡接传感器R;
所述支撑架的上部安装有控制箱,所述控制箱的内部设置有横向板,所述横向板固定连接滑动导杆,所述滑动导杆的底端依次穿过控制箱和支撑架套接有缓冲弹簧组件,所述缓冲弹簧组件的底端固定连接固定板的上部,所述固定板的底部通过支架转动连接标记轮,所述支架的一侧设置有标记电机,所述标记电机的输出端穿过支架固定连接标记轮;
所述控制箱的上部固定连接角度检测板二的底部,所述角度检测板二的上部固定连接旋转盘二的底部,所述旋转盘二的上部通过伸缩杆固定连接位移检测模块一,所述旋转盘二的一侧螺纹连接有传感器T,所述角度检测板二的上部周向均匀卡接传感器R;
所述支撑架的一侧设置有位置安装板,所述位置安装板的底部固定连接有定位吸盘,实现在地面平整的环境下,使用定位吸盘进行定位,在环境不平整的情况下,所述位置安装板的两侧分别螺纹连接螺钉杆,通过螺钉杆对地面进行固定连接,所述位置安装板的上部固定连接角度检测板三的底部,所述角度检测板三的上部固定连接旋转盘三,所述旋转盘三的上部通过伸缩杆固定连接位移检测模块二,所述旋转盘三的一侧螺纹连接有传感器T,所述角度检测板三的上部周向均匀卡接传感器R。
位移检测模块一与位移检测模块二之间相对设置,旋转盘二和旋转盘三之间的旋转方向相反设置,旋转盘三与旋转盘一之间的旋转方向相同设置,目的通过位移检测模块一与位移检测模块二之间传感检测,以实现对实际距离的进准检测,旋转盘一的旋转调节,保证驱动轮的移动方向与位移检测模块二的旋转一直,为了保证从位移检测模块二至目的测距地的直径距离的测量,以实现测量出预设的建筑施工预定规划尺寸。
进一步的,所述缓冲弹簧组件包括缓冲支撑板和三个缓冲弹簧,所述缓冲支撑板上部固定连接滑动导杆的底端,所述缓冲支撑板的底部通过三个缓冲弹簧固定连接固定板的上部,通过三个缓冲弹簧的设置,起到滑动导杆对标记轮的按压时,起到一起缓冲作用,增加标记的清晰度。
进一步的,所述标记电机通过固定块连接固定板,所述固定板远离标记电机的一侧设置有配重块,配重块设置的目的:由于标记轮与位移检测模块一底部连接的伸缩杆在同一轴线上,可以实现精确尺寸测量,使得配重块的设置与标记电机的重量达到平衡,实现标记轮对测量后的尺寸精确标记,降低误差的出现。
进一步的,所述标记轮的表面均匀卡接至少两个印章标记棉,印章标记棉的设置目的是实现在地面平整情况下使用,利于容易看到标记测量出的尺寸。
进一步的,所述标记轮的表面均匀固定连接至少两个标记块,标记块的材质选择,优选硬质标记块,可以起到在地面不平整的情况下,对测量后的距离进行标记,起到灵活测量使用的目的。
综上,本发明提供一种建筑机器人测距测量装置,通过角度检测组件对旋转角度的控制,实现测距测量出预设规划建设尺寸,通过位移检测模块一与位移检测模块二之间的距离检测,在测绘出实际距离后,通过标记电机旋转标记轮,在通过滑动导杆伸出,使得标记轮按压至地面,进行标记处测绘最终距离,实现了精确、快速的测距测量技术。
附图说明
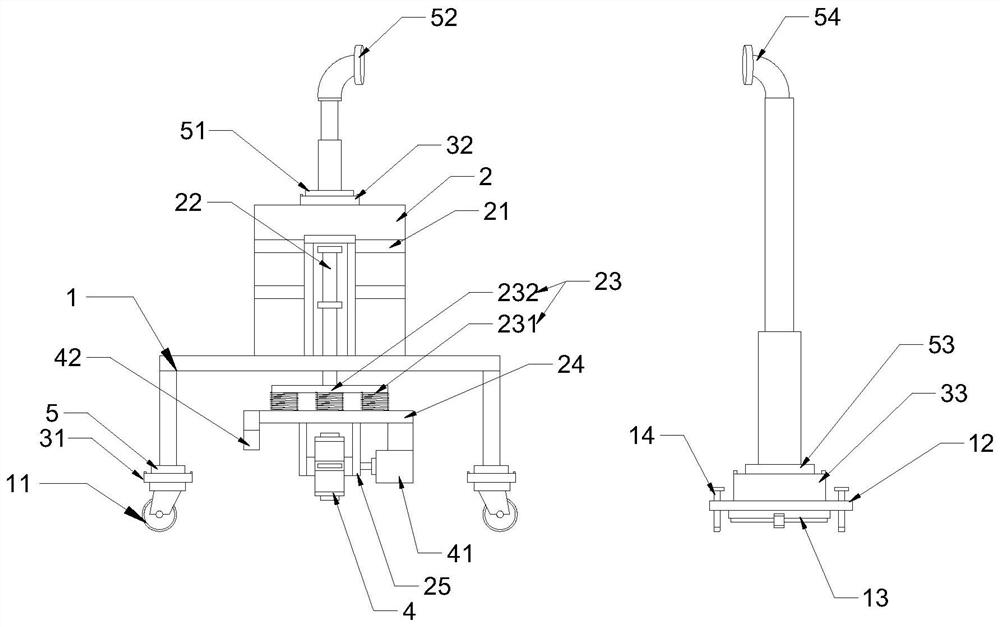
图1是本发明的结构示意图;
图2是本发明的角度检测组件和旋转转盘组件配合使用的结构示意图;
图中:支撑架1、驱动轮11、安装板12、定位吸盘13、螺钉杆14、控制箱2、横向板21、滑动导杆22、缓冲弹簧组件23、缓冲支撑板231、三个缓冲弹簧232、固定板24、支架25、角度检测组件3、角度检测板一31、角度检测板二32、角度检测板三33、标记轮4、标记电机41、配重块42、旋转盘一5、旋转盘二51、位移检测模块一52、旋转盘三53、位移检测模块二54、传感器T6、传感器R7、旋转转盘组件9。
具体实施方式
下面结合附图对本发明做进一步说明。
如图1至图2所示,本发明是一种建筑机器人测距测量装置,包括支撑架1、控制箱2、角度检测组件3和旋转转盘组件9,角度检测组件3包括角度检测板一31、角度检测板二32和角度检测板三33,旋转转盘组件9包括旋转盘一5、旋转盘二51和旋转盘三53,支撑架1的底部固定连接旋转盘一5的上部,旋转盘一5的底部转动连接角度检测板一31的上部,角度检测板一31的底部固定连接驱动轮11,驱动轮11优选使用原装进口AGV驱动轮,具有动力足、转矩精确的优点,旋转盘一5的一侧螺纹连接有传感器T6,角度检测板一31的上部周向均匀卡接传感器R7;
支撑架1的上部安装有控制箱2,控制箱2的内部设置有横向板21,横向板21固定连接滑动导杆22,滑动导杆22的底端依次穿过控制箱2和支撑架1套接有缓冲弹簧组件23,缓冲弹簧组件23的底端固定连接固定板24的上部,固定板24的底部通过支架25转动连接标记轮4,支架25的一侧设置有标记电机41,标记电机41的输出端穿过支架25固定连接标记轮4;
控制箱2的上部固定连接角度检测板二32的底部,角度检测板二32的上部固定连接旋转盘二51的底部,旋转盘二51的上部通过伸缩杆固定连接位移检测模块一52,旋转盘二51的一侧螺纹连接有传感器T6,角度检测板二32的上部周向均匀卡接传感器R7;
支撑架1的一侧设置有位置安装板12,位置安装板12的底部固定连接有定位吸盘13,位置安装板12的两侧分别螺纹连接螺钉杆14,位置安装板12的上部固定连接角度检测板三33的底部,角度检测板三33的上部固定连接旋转盘三53,旋转盘三53的上部通过伸缩杆固定连接位移检测模块二54,旋转盘三53的一侧螺纹连接有传感器T6,角度检测板三33的上部周向均匀卡接传感器R7。
进一步的,缓冲弹簧组件23包括缓冲支撑板231和三个缓冲弹簧232,缓冲支撑板231上部固定连接滑动导杆22的底端,缓冲支撑板231的底部通过三个缓冲弹簧232固定连接固定板24的上部。
进一步的,标记电机41通过固定块连接固定板24,固定板24远离标记电机41的一侧设置有配重块42,配重块设置的目的:由于标记轮4与位移检测模块一52底部连接的伸缩杆在同一轴线上,可以实现精确尺寸测量,使得配重块42的设置与标记电机41的重量达到平衡,实现标记轮4对测量后的尺寸精确标记,降低误差的出现。
进一步的,标记轮4的表面均匀卡接至少两个印章标记棉43,印章标记棉的设置目的是实现在地面平整情况下使用,利于容易看到标记测量出的尺寸。
进一步的,标记轮4的表面均匀固定连接至少两个标记块44,标记块44的材质选择,优选硬质标记块,可以起到在地面不平整的情况下,对测量后的距离进行标记,起到灵活测量使用的目的。
综上总述,本发明提供一种建筑机器人测距测量装置,具体使用方式为:
支撑架1、驱动轮11、安装板12、定位吸盘13、螺钉杆14、控制箱2、横向板21、滑动导杆22、缓冲弹簧组件23、缓冲支撑板231、三个缓冲弹簧232、固定板24、支架25、角度检测组件3、角度检测板一31、角度检测板二32、角度检测板三33、标记轮4、标记电机41、配重块42、旋转盘一5、旋转盘二51、位移检测模块一52、旋转盘三53、位移检测模块二54、传感器T6、传感器R7、旋转转盘组件9。
首先选取建筑规划中心点,依据选取的环境,通过外部无线控制设备进行控制本设备运行,安装定位吸盘13或是螺钉杆14,进行固定位移检测模块二54的整体设备,控制设备进行无线控制旋转盘三53进行角度旋转,通过旋转盘三53上安装传感器T6与角度检测板三33的传感器R7角度旋转控制,实现对初始测距方向的确定,同理,通过控制设备进行无线控制旋转盘二51进行角度旋转,通过旋转盘二51上安装传感器T6与角度检测板三33的传感器R7角度旋转控制,实现位移检测模块一52与位移检测模块二54位置的对位,同理,通过控制设备控制旋转盘一5进行旋转驱动轮11进行对预设角度转向,且旋转角度与旋转盘三53的旋转角度一直,目的实现位移检测模块一52与位移检测模块二54直线距离的检测,以确定出建筑规划的初步测距,通过旋转盘三53的旋转作用,进行调节位移检测模块二54的旋转方向,确定下一个规划测距点,旋转盘二51的旋转方向与旋转盘三53旋转方向相反,且角度大小调节一直,同时旋转盘一5的旋转角度与旋转盘三53旋转方向相同,无线控制设备控制驱动轮11进行驱动,当位移检测模块一52与位移检测模块二54检测相对位后,由滑动导杆22向下推动按压标记轮4,实现对第一个测距点进行标记,同理,通过旋转盘三53旋转调节位移检测模块二54,旋转盘二51用相同的角度反向进行调节旋转盘二51,旋转盘一5用相同的角度正向进行调节驱动轮11,通过驱动驱动轮11,当位移检测模块一52与位移检测模块二54检测相对位后,通过标记电机旋转标记轮4,转动至下一个标记点,由滑动导杆22向下推动按压标记轮4,实现对第二个测距点进行标记,以此类推,实现对建筑整体规划测距测量,实现精准的线条点选取。
- 一种建筑机器人测距测量装置
- 一种基于超声波测距仪的泊车机器人测量轴距的装置及方法