旋转电机的控制装置和控制方法
文献发布时间:2023-06-19 13:26:15
技术领域
本发明涉及一种旋转电机的控制装置。
背景技术
作为本技术领域的背景技术,存在以下现有技术。在专利文献1(日本专利特开2007-259644号公报)中,记载了一种车辆用发电电动装置,包括:发电电动机,其具有彼此隔开规定的空间相位差进行设置的至少两个三相绕组;至少两个直流交流变换装置,其分别与各个所述三相绕组交换三相交流电流;以及控制器,其控制所述直流交流变换装置,所述控制器根据转矩或转速的要求间歇地控制所述第一直流交流变换装置的开关元件,向所述第一三相绕组提供第一三相交流电流,并且间歇地控制所述第二直流交流变换装置的开关元件,以确保向所述第二三相绕组提供的第二三相交流电流与所述第一三相交流电流具有预定的电流相位差。
现有技术文献
专利文献
专利文献1:日本专利特开2007-259644号公报
发明内容
发明所要解决的技术问题
电动汽车和混合动力汽车采用通过电动机的再生转矩来进行减速的再生制动。另外,在再生制动和机械制动并用的再生协同制动中,需要专用的制动系统来控制再生制动和机械制动的切换,从成本的角度来看,难以应用到大多汽车上。因此,希望通过再生制动对从减速到停止进行控制。
然而,在仅通过再生制动控制车辆从减速到停止的情况下,在制动时电池需要能够承接电力的余量。因此,需要一种在考虑电池的SOC的同时,控制电动机驱动力和制动力的方法。
解决技术问题所采用的技术方案
如下所述,示出本申请公开的发明的代表性的一个例子。即,一种控制装置,用于控制具有多个独立系统的绕组的旋转电机,其特征在于,通过第一模式和第二模式来控制所述旋转电机,在该第一模式下,通过向多个所述系统的绕组提供交流电流来产生转矩,使得在所述绕组中产生的合成磁场变为规定值以上,在该第二模式下,向多个所述系统的绕组提供相位差与所述第一模式不同的交流电流,使在所述绕组中产生的合成磁场小于所述规定值,并且在该第二模式下流过的电流为所述第一模式的电流以上。
发明效果
根据本发明的一个方式,能在考虑电池的SOC的同时,控制旋转电机的驱动力和制动力。上述以外的问题、结构及效果通过以下实施例的说明来进一步明确。
附图说明
图1是本发明的实施例的搭载有旋转电机驱动系统的混合动力型电动汽车的概略结构图。
图2是示出本实施例的旋转电机驱动系统和旋转电机的结构的图。
图3是示出本实施例的动力运行时的第一模式下的磁动势矢量的图。
图4是示出本实施例的动力运行时的第一模式下的电流波形的图。
图5是示出本实施例的动力运行时的第二模式下的磁动势矢量的图。
图6是示出本实施例的动力运行时的第二模式下的电流波形的图。
图7是示出本实施例的再生时的第一模式下的磁动势矢量的图。
图8是示出本实施例的再生时的第一模式下的电流波形的图。
图9是示出本实施例的再生时的第二模式下的磁动势矢量的图。
图10是示出本实施例的再生时的第二模式下的电流波形的图。
图11是示出本实施例的强制放电时(第三模式)的磁动势矢量的图。
图12是示出本实施例的强制放电时(第三模式)的电流波形的图。
具体实施方式
以下,使用附图说明实施例。
图1是示出搭载有本发明实施例的旋转电机控制装置16的车辆(混合动力汽车或电动汽车)10的结构的图。
例如,混合动力汽车的车辆10搭载有发动机12、第一旋转电机100、第二旋转电机101和高压电池201。电池201由锂离子电池或镍氢电池等充电电池构成,输出250伏~600伏或更高电压的直流电。当需要旋转电机100、101的驱动力时,电池201向旋转电机100、101提供直流电,并且在再生行驶时从旋转电机100、101提供直流电。电池201与旋转电机100、101之间的直流电通过旋转电机控制装置16进行交换。
另外,虽然省略了图示,但是车辆10安装有供给低压电(例如,14伏系电力)的辅机电池。发动机12和旋转电机100、101的旋转转矩通过变速器13和差动齿轮140传递到前轮11。旋转电机100、101被构成为几乎相同,并且下面将对旋转电机100进行说明。
旋转电机100是永磁体内置型的三相同步电动机。旋转电机100通过向卷绕在定子芯体上的定子线圈提供三相交流电流,从而作为使转子旋转的电动机进行动作。此外,当旋转电机100由发动机12驱动时,旋转电机100作为发电机进行动作,并且输出三相交流的发电电力。即,旋转电机100具有作为利用电能产生旋转转矩的电动机的动力运行功能和作为利用机械能发电的发电机的再生功能这两者,并且能根据汽车的行驶状态选择性地利用上述功能。
车辆10通过驾驶员操作省略图示的油门踏板和制动踏板来加速和减速。例如,当驾驶员操作油门踏板时,根据踩入量产生驱动力来进行动力行驶。当驾驶员操作制动踏板时,根据踩入量产生制动力,并进行再生行驶。
此外,车辆10可以通过驾驶员操作省略图示的单个油门踏板来加速和减速。在这种情况下,当驾驶员踩下油门踏板并且油门踏板的操作量较大时,通过动力行驶来产生驱动力,并且当油门踏板的操作量较小时,通过再生行驶来产生制动力。
图2是示出本实施例的旋转电机控制装置16和旋转电机100的结构的图。另外,虽然将在后面说明旋转电机100的控制,但是旋转电机101也能够进行同样的控制。
实施例1的旋转电机控制装置16控制旋转电机100的驱动。旋转电机100例如是车辆10行驶用的电动机。旋转电机控制装置16具有电池201、电容器202、控制微机203、驱动电路204和逆变器电路210。
旋转电机100是两个独立系统Y接线的三相交流旋转电机。即,旋转电机100具有分别对应于第一系统的U1相、V1相、W1相的三相电枢绕组102u1、102v1、102w1、以及分别对应于第二系统的U2相、V2相、W2相的三相电枢绕组102u2、102v2、102w2。由于各系统的电枢绕组102u至102w彼此独立地设置,因此能使不同的电流在各相中流过。各个系统中,电枢绕组102分别在中性点n1、n2处相连接。如图所示,中性点n1、n2可以设置在旋转电机100的内部,但也可以设置在旋转电机100的外部。
逆变器电路210通过独立地控制流过电枢绕组102u~102w的电流来驱动旋转电机100。用于检测旋转电机100的磁极位置的位置检测部110安装在旋转电机100的输出轴上。位置检测部110得出的磁极位置的检测结果被输出到控制微机203。
电池201经由直流母线201a、201b向逆变器电路210提供直流电。可以使用例如锂离子电池等充电电池作为电池201。
电容器202用于吸收伴随逆变器电路210的动作而产生的直流电压的变动,并且与逆变器电路210并联连接在直流母线201a和直流母线201b之间。
控制微机203进行规定的电流控制运算,并基于其运算结果向驱动电路204输出指示各相的输出电压和输出电流的控制信号。驱动电路204分别向逆变器电路210的各相的桥式电路211u1、211v1、211w1输出驱动信号Gu1、Gv1、Gw1。通过根据该驱动信号Gu1、Gv1、Gw1分别使桥式电路211u1、211v1、211w1进行动作,控制微机203通过驱动电路204控制逆变器电路210。
逆变器电路210具有分别对应于第一系统的U相、V相、W相的桥式电路211u1、211v1、211w1。各桥式电路211u1、211v1和211w1具有作为各个上臂和下臂的开关元件起作用的IGBT、以及与各个IGBT并联设置的二极管。在桥式电路211u1、211v1、211w1中,各个IGBT根据来自驱动电路204的驱动信号Gu1、Gv1、Gw1进行开关动作。由此,从电池201提供的直流电被转换为三相交流电,从桥式电路211u1、211v1、211w1经由各相的交流输出线120向旋转电机100的各相的电枢绕组102u1、102v1、102w1分别输出交流电流。
在各相的交流输出线120分别设置有电流传感器130,该电流传感器130用于检测流过旋转电机100的电枢绕组102u1、102v1、102w1的各电流。在图示的示例中,电流传感器130设置在逆变器电路210的内部,但也可以设置在逆变器电路210的外部。由电流传感器130检测到的各相的电流值被输出到控制微机203。控制微机203基于驾驶员对油门踏板和制动踏板的操作、从其它ECU输入的控制指令、从电流传感器130输入的各相的电流值、以及位置检测部110对磁极位置的检测,进行规定的电流控制运算,并基于该运算结果输出控制信号,该控制信号指示驱动电路204输出各相的驱动信号Gu1、Gv1、Gw1。
以上,对于第1系统,说明了控制微机203、驱动电路204以及逆变器电路210的动作,第2系统也同样地动作。由此,通过控制各相的交流电流的振幅和相位,控制各系统的电枢绕组102的磁动势的大小和方向,控制合成磁动势的方向和大小,调整电流的大小、动力运行转矩和再生转矩的大小,并且调整输入到电池201和从电池201输出的能量。
图3是示出动力运行时的第一模式下的磁动势矢量的图,图4是示出动力运行时的第一模式下的电流波形的图。
在动力运行时的第一模式中进行如下控制:使同相电流流过各个系统的电枢绕组102,并使得第一系统的电枢绕组102的磁动势的方向和第二系统的电枢绕组102的磁动势的方向接近。即,如图3所示,各系统的磁动势的方向有偏移,且偏移了各系统的电枢绕组102的卷绕位置的差分(图中为30°),而合成磁动势的方向是接近各系统的磁动势的方向,合成磁动势变大,产生的转矩变大。即,在第一模式下,调整电流振幅Ia和电流相位β(电流相位β=0),使得目标转矩的电流值变小。
在图3所示的情况下,各系统的磁动势的方向偏移30°,但是通过在第二系统的电枢绕组102中流过比第一系统的电枢绕组102提前30°的电流,能使各系统的磁动势的方向相等。由此,能使合成磁动势大于图3所示的动力运行时的第一模式。
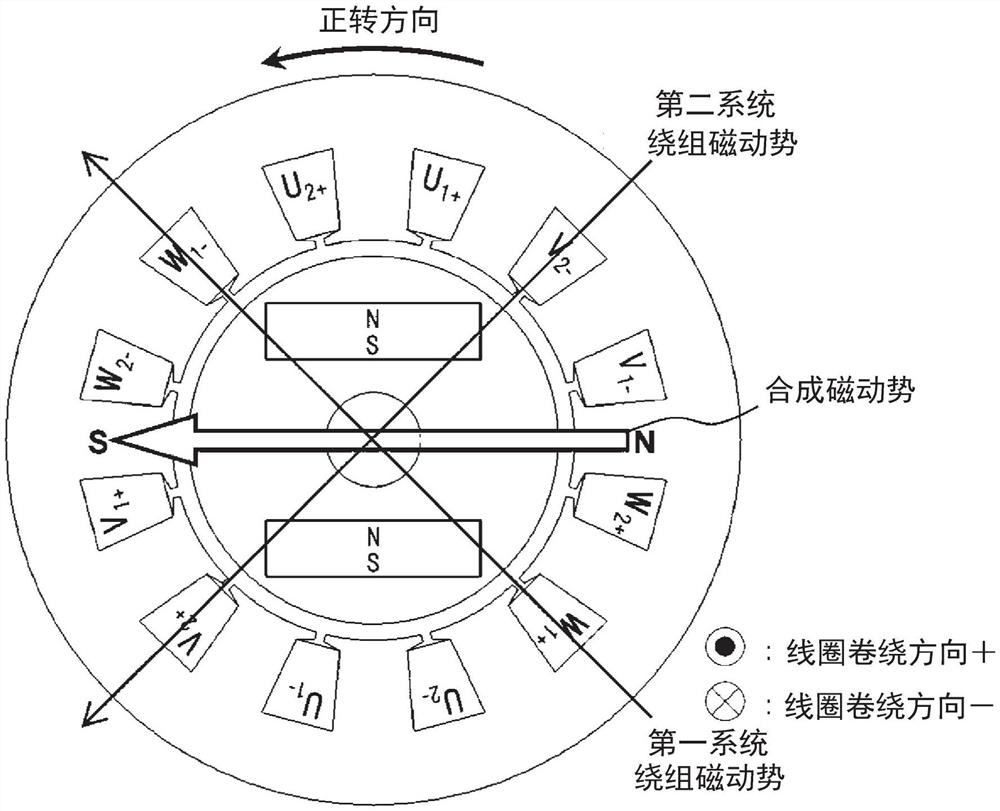
图5是示出动力运行时的第二模式下的磁动势矢量的图,图6是示出动力运行时的第二模式下的电流波形的图。
在动力运行时的第二模式中进行如下控制:使不同相位(例如,如图6所示,60°)的电流流过各个系统的电枢绕组102,并且使得第一系统的电枢绕组102的磁动势的方向与第二系统的电枢绕组102的磁动势的方向正交。具体地说,如图5所示,各系统的磁动势的方向有偏移,且偏移了各系统的电流相位差60°与各系统的电枢绕组102的卷绕位置的差分(图中为30°)之和90°,合成磁动势变小。即,在第二模式中,调整电流振幅Ia和电流相位β(电流相位β=0),使得目标转矩的电流值变大。
由此,控制微机203根据驾驶员对油门踏板的操作量,在动力运行时选择第一模式、第二模式或其它动作模式,并控制流过旋转电机100的电枢绕组102的电流的振幅和相位。例如,在动力运行时的第一模式下,为了获得相同的转矩能减小电流值,能在能量消耗效率高的状态下控制车辆。另一方面,在动力运行时的第二模式下,为了获得相同的转矩能增大电流值,能进行控制使得能量消耗比第一模式下的能量消耗增加,并且电池201的SOC不变高。例如,在考虑今后的行驶路线的状况来控制行驶的所谓前瞻控制中,期望根据前方道路的坡度和交通状况来控制电池201的充放电。具体地说,若在进入下坡之前通过第二模式主动消耗电池201,则在下坡时可通过再生获得所需的制动力。
图7是示出再生时的第一模式下的磁动势矢量的图,图8是示出再生时的第一模式下的电流波形的图。控制微机203根据驾驶员对油门踏板或制动踏板的操作量,在减速时选择再生时的第一模式,并控制流向旋转电机100的电枢绕组102的电流的振幅和相位。
在再生时的第一模式下进行如下控制:使同相电流流过各个系统的电枢绕组102,并使得第一系统的电枢绕组102的磁动势的方向和第二系统的电枢绕组102的磁动势的方向接近。即,如图7所示,各系统的磁动势的方向有偏移,且偏移了各系统的电枢绕组102的卷绕位置的差分(图中为30°),合成磁动势的方向是接近各系统的磁动势的方向,合成磁动势变大,产生的转矩变大。此外,在第一模式下,调整电流振幅Ia和电流相位β(电流相位β=180)使得目标转矩的电流值变为最小,因此发电动机的效率变低,用于获得期望转矩(制动力)的电流变小。
图9是示出再生时的第二模式下的磁动势矢量的图,图10是示出再生时的第二模式下的电流波形的图。控制微机203根据驾驶员对油门踏板或制动踏板的操作量,在减速时选择再生时的第二模式,并控制流向旋转电机100的电枢绕组102的电流的振幅和相位。
在再生时的第二模式下进行如下控制:使不同相位(例如,如图10所示,300°)的电流流过各个系统的电枢绕组102,并使得第一系统的电枢绕组102的磁动势的方向与第二系统的电枢绕组102的磁动势的方向正交。具体地说,如图9所示,各系统的磁动势的方向有偏移,且偏移了各系统的电流的相位差60°与各系统的电枢绕组102的卷绕位置的差分(图中为30°)之和90°,合成磁动势变小。此外,在第二模式下,调整电流振幅Ia和电流相位β(电流相位β=180)使得相对于目标转矩的电流值变大,因此发电动机的效率变高,用于获得期望转矩(制动力)的电流变大。
由此,控制微机203根据驾驶员对油门踏板的操作量,在动力运行时选择第一模式、第二模式或其它动作模式,并控制流过旋转电机100的电枢绕组102的电流的振幅和相位。例如,在再生时的第一模式下,为了获得制动转矩能减小电流值,与第二模式相比能减小电池201充电的能量,能进行控制使得电池201的SOC不变高。
另一方面,在再生时的第二模式下,能增大电流值以获得制动转矩,能增加电池201充电的能量,从而提高能量效率。因此,当电池201的SOC处于较高的状态时,可以选择第一模式,获得必要的制动力的同时降低向电池201充电的电力,当电池201的SO处于较低的状态时,可以选择第二模式,提高向电池201充电的电力。
特别地,在能够通过上述的单个油门踏板控制从加速到减速的单踏板控制的汽车中,当油门踏板的操作量较小时,通过再生制动进行减速控制,因此需要电池201有能承接电力的余量。因此,在进行单踏板控制时,若根据电池201的SOC切换第一模式和第二模式,则能进行控制使得电池201的SOC不变高,并且能平稳地控制车辆。
图11是示出放电模式(第三模式)下的磁动势矢量的图,图12是示出放电模式(第三模式)下的电流波形的图。
在第三模式下,是用于对电池201和电容器202的电荷进行放电的模式。例如,当车辆在惯性行驶(转矩=0)期间消耗电池201的能量时,或者当车辆在停止期间对电容器202的电荷进行快速放电时,使用该第三模式。
在第三模式下进行如下控制:使不同相位(例如,如图12所示,150°)的电流流过各系统的电枢绕组102,并使得第一系统的电枢绕组102的磁动势的方向和第二系统的电枢绕组102的磁动势的方向为相反方向。具体地说,如图11所示,各系统的磁动势的方向有偏移,并且偏移了各系统的电流的相位差150°与各系统的电枢绕组102的卷绕位置的差分(图中为30°)之和180°,合成磁动势变为0,不产生转矩。
在现有的放电模式下,由于转子停止并且使直流电流流过特定系统的电枢绕组102,因此存在特定电枢绕组102因该电枢绕组102的直流电阻发热的问题。此外,由于在磁体的正上方产生由流过电枢绕组102的电流产生的磁场,所以磁体会发热。然而,在本实施例的第三模式下,由于交流电流在两个系统的电枢绕组102中流动,所以电枢绕组102的发热量(升温)能平均。另外,由于通过两个系统的绕组抵消磁场,磁体不会发热。
例如,在考虑今后的行驶路线的状况来控制行驶的所谓前瞻控制中,期望根据前方道路的坡度和交通状况来控制电池201的充放电。例如,若在进入下坡之前的惯性行驶时通过第三模式使电池201主动放电,则在下坡时通过再生制动获得所需的制动力。此外,当希望在前方行驶路线的拥堵处进行EV行驶时,在拥堵处之前可以通过动力运行时的第一模式来抑制电力消耗,或者通过再生时的第二模式来增加充电量,来确保用于EV行驶的电力。
此外,当车辆由于事故或故障而紧急停止并且需要救出乘客时,需要切断电池201,并且需要快速对电容器202的电力进行放电。此时,通过第三模式消耗电容器202的电力,能防止救援人员触电。
如上所述,根据本发明的实施例,用于控制具有多个独立系统的绕组的旋转电机100的控制装置(旋转电机控制装置16的控制微机203)通过第一模式和第二模式来控制旋转电机100,在该第一模式下向多个系统的绕组提供交流电流,来产生转矩,使得在绕组中产生的合成磁场变为规定值以上,在该第二模式下向多个系统的绕组提供相位差与第一模式不同的交流电流,从而使在绕组中产生的合成磁场小于规定值,并且使在该第二模式下流过的电流为第一模式的电流以上,因此,能在考虑电池的SOC的同时控制旋转电机的驱动力和制动力。即,能在动力运行期间,通过第二模式产生需要的驱动转矩的同时,能够主动地消耗电池201的电力,在再生期间,通过第一模式产生需要的制动转矩的同时,能够减少对电池201充电的电力。因此,能够抑制电枢绕组102的温度升高。此外,与根据d轴电流的大小调整电池201的电力消耗的现有控制相比,通过使交流电流流过两个系统的绕组来调整电力消耗的量,因而能使电枢绕组102的温度上升均衡,并且能抑制磁体的温度上升。
此外,控制装置通过第三模式控制所述电动机,在该第三模式下通过向多个系统的绕组提供相位不同的交流电流,使产生的合成磁场为0,利用流过该绕组的交流电流来消耗电池201和电容器202中的至少一个的电力。通过使在第一系统的电枢绕组102中流过的三相交流电流产生的磁场和在第二绕组的电枢绕组102中流过的三相交流电流产生的磁场抵消,从而不产生转矩地向电枢绕组102通电,因此能够有效且快速地使设置在向旋转电机100提供交流电的逆变器电路210的前级上的电容器202放电,从而能够减少在惯性行驶时电池201的充电量。
此外,由于控制装置通过一个踏板的操作量在动力运行控制和再生控制之间切换,并且在再生控制期间根据电池201的充电量在第一模式和第二模式之间切换,因此能在根据车辆状况产生加速度或减速度的同时调整电池201的充电量,能进行控制使得电池201的SOC不变高,并且能平稳地控制车辆。
另外,本发明不限于上述实施例,包括在所附的权利要求书的主旨内的各种变形例和等同的结构。例如,所述实施例是为了便于理解本发明而进行的详细说明,并不限于要具备所说明的所有结构。另外,可以将某个实施例的结构的一部分替换成其它实施例的结构。另外,还可以将其它实施例的结构加入某个实施例的结构。另外,对于各实施例的结构的一部分,也可以进行其它结构的追加、删除、替换。
另外,上述的各结构、功能、处理部、处理单元等,也可以将它们的一部分或全部例如通过集成电路设计等,从而用硬件来实现,也可以通过处理器解释并执行用于实现各个功能的程序,从而用软件来实现。
实现各功能的程序、表格、文件等的信息可以存储在存储器或硬盘、SSD(SolidState Drive:固态硬盘)等存储装置、或IC卡、SD卡、DVD等记录介质。
此外,示出了考虑到说明上所必须的控制线、信息线,但是并不限于是示出了安装上所必须的全部的控制线、信息线。实际上也可以认为几乎所有的结构都是互相连接的。
标号说明
10车辆,11前轮,12发动机,13变速器,16旋转电机控制装置,100、101旋转电机,102电枢绕组,110位置检测部,120交流输出线,130电流传感器,140差动齿轮,201电池,201a、201b直流母线,202电容器,203控制微机,204驱动电路,210逆变器电路,211桥式电路。
- 旋转电机的控制装置、旋转电机及旋转电机的控制方法
- 旋转电机的控制装置、旋转电机及旋转电机的控制方法