防溢出装置及其方法
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及厨房设备技术,尤其涉及一种防溢出装置及其方法。
背景技术
在日常生活中,人们会使用锅体进行烹饪。
人们将食材和水放置于锅体内,再将锅盖盖合于锅体,并将锅体放置于燃气灶进行加热。由于烹饪所需的时间较长,人们并不会守在在燃气灶旁边。随着燃气灶对锅体持续加热,锅体内的液体会沸腾,使得锅体内液体溢出锅体,进而浇灭燃气灶的火焰,导致煲汤中断且使得燃气泄露。
目前,对于液体的溢出预防,人们是通过自身的烹饪经验在炊具上设置液体溢出的提醒时间点,但烹饪时的燃气灶的火焰、食材的分量以及锅体内水的分量的不同,导致预测锅体溢出液体的时间点并不准确。可见,现有防溢出方案的防溢出效果较差。
发明内容
本发明提供一种防溢出装置及其方法,用以解决现有的防溢出方案的防溢出效果较差的问题。
一方面,本发明提供一种防溢出装置,包括:
机械臂,所述机械臂的固定端固定于墙壁;
锅盖,所述锅盖设有溢出感应器,所述溢出感应器用于检测所述锅盖盖合的锅体中的液体是否溢出;
控制器,用于在所述溢出感应器检测到所述锅体中的液体溢出时,控制所述机械臂的夹持端夹持所述锅盖离开所述锅体。
在一实施例中,所述防溢出装置还包括水泵,所述锅盖上设置进水口,所述水泵与所述进水口通过管路连接,所述溢出感应器在感应到所述锅盖盖合的锅体中的液体时,所述水泵启动以通过所述管路向所述锅体加入冷却水。
在一实施例中,所述锅盖设有检测所述锅体内温度的温度传感器,在所述温度传感器检测到的温度小于预设温度时,所述控制器控制所述机械臂的夹持端夹持所述锅盖盖合所述锅体。
在一实施例中,所述防溢出装置设有通信模块,在所述温度传感器检测到的温度大于预设温度时,所述通信模块向所述锅体所在的燃气灶发送减小火力的指令。
在一实施例中,所述锅盖设有图像采集模块,所述通信模块还用于将所述图像采集模块采集的所述锅体内的图像以及所述温度传感器检测温度,传输至外部设备的显示屏进行显示。
在一实施例中,所述防溢出装置设有手势感应器,所述机械臂根据所述手势感应器感应的手势夹持所述锅盖离开所述锅体或夹持所述锅盖盖合所述锅体。
另一方面,本发明提供一种防溢出方法,应用于防溢出装置,所述防溢出装置包括机械臂以及锅盖,所述机械臂的固定端固定于墙壁,所述锅盖设有用于检测所述锅盖盖合的锅体中的液体是否溢出的溢出感应器;所述防溢出方法包括:
在接收到所述溢出感应器发送的信号时,控制所述机械臂的夹持端夹持所述锅盖离开所述锅体,其中,所述溢出感应器在感应到所述锅体内的液体时,传输所述信号。
在一实施例中,所述防溢出装置包括水泵,所述锅盖上设置进水口,所述水泵与所述进水口通过管路连接,所述控制所述机械臂的夹持端夹持所述锅盖离开所述锅体的步骤之后,还包括:
控制所述水泵运行预设时长,以向所述锅体内加入冷却水。
在一实施例中,所述锅盖设有检测所述锅体内温度的温度传感器,所述控制所述机械臂的夹持端夹持所述锅盖离开所述锅体的步骤之后,还包括:
获取所述温度传感器检测的第一温度;
在所述第一温度小于第一预设温度时,控制所述机械臂的夹持端夹持所述锅盖盖合所述锅体。
在一实施例中,所述锅盖设有检测所述锅体内温度的温度传感器,所述防溢出装置设有通信模块,所述控制所述机械臂的夹持端夹持所述锅盖离开所述锅体的步骤之后,还包括:
获取所述温度传感器检测的第二温度;
在所述第二温度大于第二预设温度时,通过所述通信模块向所述锅体所在燃气灶发送减小火力的指令。
在一实施例中,所述锅盖设有检测所述锅体内温度的温度传感器以及设有采集锅体内图像的图像采集模块,所述防溢出装置设有通信模块,所述控制所述机械臂的夹持端夹持所述锅盖离开所述锅体的步骤之后,还包括:
获取所述图像采集模块检测的采集的图像以及所述温度传感器检测的第三温度;
通过所述通信模块将所述第三温度以及所述图像传输至外部设备的显示屏进行显示。
在一实施例中,所述防溢出装置设有手势感应器,所述机械臂根据所述手势感应器感应的手势夹持所述锅盖离开所述锅体或夹持所述锅盖盖合所述锅体。
本发明提供的防溢出装置及其方法,防溢出装置包括机械臂、锅盖和控制器,机械臂的固定端固定与墙壁,锅盖设置有溢出感应器,溢出感应器在感应到锅盖盖合的锅体内的液体时,控制器控制机械臂的夹持端夹持锅体离开锅体。本发明中,锅盖上的溢出感应器感应到锅体中的液体时,即可确定锅体内的液体沸腾且液体接触到锅盖,也即确定液体会溢出锅体,防溢出装置再控制机械臂夹持锅盖离开锅体,从而使得锅体内液体温度以及锅体内的压力迅速降低,避免锅体内液体溢出,防溢出装置的防溢出效果较好。
附图说明
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。
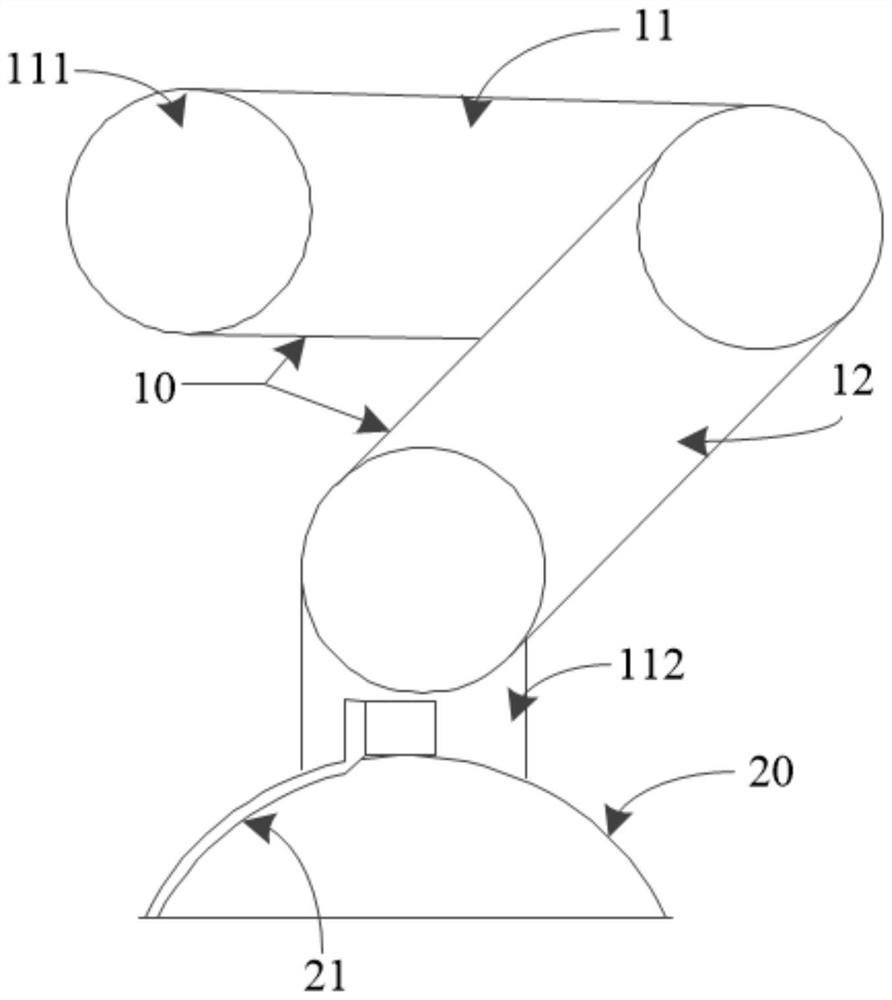
图1为本发明防溢出装置的一结构示意图;
图2为本发明防溢出装置的另一结构示意图;
图3为本发明防溢出方法第一实施例的流程示意图;
图4为本发明防溢出方法第二实施例的流程示意图;
图5为本发明防溢出方法第三实施例的流程示意图。
通过上述附图,已示出本公开明确的实施例,后文中将有更详细的描述。这些附图和文字描述并不是为了通过任何方式限制本公开构思的范围,而是通过参考特定实施例为本领域技术人员说明本公开的概念。
具体实施方式
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本公开的一些方面相一致的装置和方法的例子。
本发明提供一种防溢出装置。
参照图1,防溢出装置包括机械臂10、锅盖20以及控制器(控制器未标示)。机械臂10可以是多轴机械臂,参照图1,机械臂10包括第一机械臂11以及第二机械臂12,第一机械臂11与第二机械臂12铰接。第一机械臂11未铰接的一端为固定端111,固定端111固定于墙壁。第二机械臂未铰接的一端为夹持端112,夹持端112为机械手,可以通过夹持端112夹持锅盖20。夹持端112与锅盖20连接。夹持端112也可以与锅盖20分离,在锅盖20需要移动时,夹持端112再夹持锅盖20移动。
锅盖20设有溢出感应器21,溢出感应器21设置于锅盖20内侧面。锅盖20盖合锅体(锅体未标示)时,内侧面封闭锅体,从而形成烹饪空间。
溢出感应器21可以感应到液体,其感应原理可以是,溢出感应器21检测锅体内的水位,若是锅体内的液体沸腾,锅体内的水位距离溢出感应器21的高度小于设定的高度,此时,即可确定溢出感应器21感应到液体,也即溢出感应器21可以是水位传感器。
控制器可以是微处理器,控制器与溢出感应器21、机械臂10通过线路连接。在采用锅体进行烹饪时,锅盖20盖合锅体。在溢出感应器21感应到锅体内的液体时,溢出感应器21向控制器发送信号,控制器则控制机械臂10的夹持端112夹持锅盖20离开锅体,从而快速降低锅体内的温度以及压力,避免液体溢出。机械臂10的夹持端112夹持锅盖20离开锅体的方式可以是将锅盖20拉高,或者夹持锅盖20移动使得锅盖20所在平面与锅体开口所在平面存在角度。
在本实施例中,防溢出装置包括机械臂、锅盖和控制器,机械臂的固定端固定与墙壁,锅盖设置有溢出感应器,溢出感应器在感应到锅盖盖合的锅体内的液体时,控制器控制机械臂的夹持端夹持锅体离开锅体。本发明中,锅盖上的溢出感应器感应到锅体中的液体时,即可确定锅体内的液体沸腾且液体接触到锅盖,也即确定液体会溢出锅体,防溢出装置再控制机械臂夹持锅盖离开锅体,从而使得锅体内液体温度以及锅体内的压力迅速降低,避免锅体内液体溢出,防溢出装置的防溢出效果较好。
参照图2,防溢出装置还包括水泵30。水泵30可以设置于机械臂10,例如,水泵30设置于第一机械臂11。锅盖20设置有进水口22,进水口22与水泵30通过管路(未标示)连接。在当溢出感应器21感应到锅体内的液体时,水泵30启动,从而通过管路向锅体内加入冷却水。加入冷却水的动作可以和机械臂10夹持锅盖20离开锅体的动作可以同步进行,也即通过加入冷却水以及揭开锅盖20能够快递的降低锅体内温度以及压力,避免锅体内的液体沸腾溢出锅体。
继续参照图2,锅盖20还设置有检测锅体内温度的温度传感器23,温度传感器23设置于锅盖20的内侧面。机械臂10夹持锅盖20离开锅体时,控制器进行锅盖是否盖合锅体的判断。具体的,在当控制器接收到温度传感器23检测锅体内的温度小于预设温度时,即可确定加入的冷却水快速的冷却了锅体内的温度,或者燃气灶已经关小火力。为了烹饪的继续进行,则控制器控制机械臂10的夹持端112夹持锅盖20盖合锅体。
此外,防溢出装置还设有通信模块40。第一机械臂11无需运动,因而可将通信模块40可以设置于第一机械臂11。在当温度传感器23检测到温度大于预设温度时,通信模块40则向锅体所在的燃气灶发送减小火力的指令,该指令即为指示燃气减小燃气流量。
另外,锅盖20还设有图像采集模块24。图像采集模块24设置于锅盖20的内侧面,图像采集模块24可采集锅体内的图像。通信模块则将图像以及温度传输至外部设备的显示屏进行显示。外部设备可以是烟机,也即用户可以通过烟机的显示屏得知锅体内食材的温度以及烹饪情况。
继续参照图2,防溢出装置还设有手势感应器50。手势感应器50可设置于第二机械臂12上,且在第二机械臂12夹持锅盖时,手势感应器50启动。用户可以向手势感应器50输出手势,手势可以是抬起锅盖的手势、放下锅盖的手势。抬起锅盖以及放下锅盖的手势可以由用户在机械臂的控制APP上进行设置。
机械臂10根据手势感应器50感应的手势夹持锅盖离开锅体或者夹持锅盖盖合锅体。例如,手势感应器50感应到抬起手势,则控制器控制机械臂10抬起锅盖20。若是手势感应器50感应到放下手势,则控制机械臂10放下锅盖20盖合锅体。通过添加手势感应器50,用户可以方便的控制锅盖离开锅体以及盖合锅体。
基于防溢出装置的结构,下面以具体地实施例对本发明的技术方案以及本申请的技术方案如何解决上述技术问题进行详细说明。下面这几个具体的实施例可以相互结合,对于相同或相似的概念或过程可能在某些实施例中不再赘述。下面将结合附图,对本发明的实施例进行描述。
参照图3,图3为本发明防溢出方法的第一实施例,防溢出方法包括以下步骤:
步骤S10,接收到溢出感应器发送的信号,其中,溢出感应器在感应到锅体内的液体时,传输信号。
在本实施例中,执行主体为防溢出装置。参照图1,防溢出装置包括机械臂10以及锅盖20。机械臂10可以是多轴机械臂,机械臂10包括第一机械臂11以及第二机械臂12,第一机械臂11与第二机械臂12铰接。第一机械臂11未铰接的一端为固定端111,固定端111固定于墙壁。第二机械臂未铰接的一端为夹持端112,夹持端112为机械手,可以通过夹持端112夹持锅盖20。夹持端112与锅盖20连接。夹持端112也可以与锅盖20分离,在锅盖20需要移动时,夹持端112再夹持锅盖20移动。
锅盖20设有溢出感应器21,溢出感应器21设置于锅盖20内侧面。锅盖20盖合锅体(锅体未标示)时,内侧面封闭锅体,从而形成烹饪空间。
溢出感应器21可以感应到液体,其感应原理可以是,溢出感应器21检测锅体内的水位,若是锅体内的液体沸腾,锅体内的水位距离溢出感应器21的高度小于设定的高度,此时,即可确定溢出感应器21感应到液体,也即溢出感应器21可以是水位传感器。
步骤S20,控制机械臂的夹持端夹持锅盖离开锅体。
在溢出感应器感应到锅体内的液体时,溢出感应器向防溢出装置的控制器发送信号。也即防溢出装置接收到溢出感应器发送的信号时,即可确定锅体内的液体有溢出的风险。防溢出装置则控制机械臂的夹持端夹持锅盖离开锅体,从而快速的降低锅体内的温度以及压力,避免锅体内的液体溢出。
在本实施例提供的技术方案中,防溢出装置包括机械臂以及锅盖,机械臂的固定端固定与墙壁,锅盖设置有溢出感应器,溢出感应器在感应到锅盖盖合的锅体内的液体时,控制器控制机械臂的夹持端夹持锅体离开锅体。本发明中,锅盖上的溢出感应器感应到锅体中的液体时,即可确定锅体内的液体沸腾且液体接触到锅盖,也即确定液体会溢出锅体,防溢出装置再控制机械臂夹持锅盖离开锅体,从而使得锅体内液体温度以及锅体内的压力迅速降低,避免锅体内液体溢出,防溢出装置的防溢出效果较好。
参照图4,图4为本发明防溢出方法第二实施例,基于第一实施例,步骤S20之后,还包括:
步骤S30,控制水泵运行预设时长,以向锅体内加入冷却水。
在本实施例中,防溢出装置还包括水泵。参照图2,水泵30可以设置于机械臂10,例如,水泵30设置于第一机械臂11。锅盖20设置有进水口22,进水口22与水泵30通过管路(未标示)连接。在当溢出感应器21感应到锅体内的液体时,水泵30启动,从而通过管路向锅体内加入冷却水。加入冷却水的动作可以和机械臂10夹持锅盖20离开锅体的动作可以同步进行,也即通过加入冷却水以及揭开锅盖20能够快递的降低锅体内温度以及压力,避免锅体内的液体沸腾溢出锅体。
具体的,防溢出装置中设置有预设时长,预设时长为一个较短的时长,也即预设时长小于预设数值,预设数值例如为1min。在当锅盖离开锅体时,也即将锅盖拉高时,防溢出装置控制水泵运行预设时长,预设时长内的加入锅体内的冷却水较少,能够降低锅体内液体的温度,且不会过大的影响食材的烹饪效果。
在本实施例提供的技术方案中,在当锅盖离开锅体时,防溢出装置控制水泵运行预设时长,从而向锅体加入少量的冷却水,能够降低锅体内液体的温度,且不会过大的影响食材的烹饪效果。
参照图5,图5为本发明防溢出方法第三实施例,基于第一或第二实施例,步骤S20之后,还包括:
步骤S40,获取温度传感器检测的第一温度。
步骤S50,在第一温度小于第一预设温度时,控制机械臂的夹持端夹持锅盖盖合锅体。
在本实施例中,锅盖设有温度传感器。参照图2,锅盖20还设置有检测锅体内温度的温度传感器23,温度传感器23设置于锅盖20的内侧面。机械臂10夹持锅盖20离开锅体时,控制器进行锅盖是否盖合锅体的判断。具体的,在当控制器接收到温度传感器23检测锅体内的温度小于预设温度时,即可确定加入的冷却水快速的冷却了锅体内的温度,或者燃气灶已经关小火力。为了烹饪的继续进行,则控制器控制机械臂10的夹持端112夹持锅盖20盖合锅体。
防溢出装置获取温度传感器检测的锅体内的第一温度。在当第一温度小于第一预设温度时,则控制机械臂的夹持端夹持锅盖盖合锅体。预设温度可为任意合适的数值,例如,第一预设温度可为70℃。
在本实施例提供的技术方案中,在当锅盖离开锅体时,防溢出装置获取温差传感器采集的锅体内的温度,在当温度小于预设温度,则控制机械臂夹持锅盖盖合锅体,从而继续进行烹饪。
在一实施例中,步骤S20之后,还包括:
获取温度传感器检测的第二温度;
在第二温度大于第二预设温度时,通过通信模块向锅体所在燃气灶发送减小火力的指令。
在本实施例中,防溢出装置还设有通信模块40。参照图2,第一机械臂11无需运动,因而可将通信模块40可以设置于第一机械臂11。在当温度传感器23检测到温度大于预设温度时,通信模块40则向锅体所在的燃气灶发送减小火力的指令,该指令即为指示燃气减小燃气流量。
在锅盖离开锅体后,防溢出装置获取温度传感器23检测的锅体内的第二温度。若是第二温度大于第二预设温度时,通过通信模块向锅体所在燃气灶发送减小火力的指令,也即通过减小燃气灶的火力降低锅体内的温度。
在一实施例中,步骤S20之后,还包括:
获取图像采集模块检测的采集的图像以及温度传感器检测的第三温度。
通过通信模块将第三温度以及图像传输至外部设备的显示屏进行显示。
在本实施例中,锅盖设有图像采集模块。参照图2,图像采集模块24设置于锅盖20的内侧面,图像采集模块24可采集锅体内的图像。通信模块则将图像以及温度传输至外部设备的显示屏进行显示。外部设备可以是烟机。
防溢出装置获取图像采集模块采集的图像以及温度传感器检测的第三温度后,再将图像以及温度传输至外部设备的显示屏,用户即可通过烟机的显示屏得知锅体内食材的温度以及烹饪情况。
在一实施例中,防溢出装置设有手势感应器,机械臂根据手势感应器感应的手势夹持锅盖离开锅体或夹持锅盖盖合锅体。
具体的,手势感应器50可设置于第二机械臂12上,且在第二机械臂12夹持锅盖时,手势感应器50启动。用户可以向手势感应器50输出手势,手势可以是抬起锅盖的手势、放下锅盖的手势。抬起锅盖以及放下锅盖的手势可以由用户在机械臂的控制APP上进行设置。
机械臂10根据手势感应器50感应的手势夹持锅盖离开锅体或者夹持锅盖盖合锅体。例如,手势感应器50感应到抬起手势,则控制器控制机械臂10抬起锅盖20。若是手势感应器50感应到放下手势,则控制机械臂10放下锅盖20盖合锅体。通过添加手势感应器50,用户可以方便的控制锅盖离开锅体以及盖合锅体。
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本公开的其它实施方案。本发明旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由下面的权利要求书指出。
应当理解的是,本公开并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本公开的范围仅由所附的权利要求书来限制。
- 电烹饪器及其防溢出控制装置和防溢出控制方法
- 电烹饪器及其防溢出控制装置和防溢出控制方法