车辆的制动控制装置
文献发布时间:2023-06-19 13:27:45
技术领域
本公开涉及车辆的制动控制装置。
背景技术
在专利文献1中,记载有通过一个电动马达调整车辆的四个轮缸的压力(液压)的制动控制装置。在专利文献2中,记载有在车辆的四个车轮设置有被电动马达驱动的电动制动装置,并且仅在前轮设置轮缸,并通过主缸加压的制动控制装置。另外,在专利文献3中,记载有通过主缸调整前轮的制动转矩,并通过电动马达调整后轮的制动转矩的制动控制装置。
然而,目前,电动汽车、混合动力汽车等通过电动马达驱动的车辆开始普及。另外,面向未来,正在进行能够自动驾驶的车辆的研究/开发。其中,在制动控制装置中,也期望电动化。
专利文献1:日本特开2012-106582号
专利文献2:日本特开2004-351965号
专利文献3:日本特开2014-051197号
发明内容
本发明的目的在于提供一种在电动化的制动控制装置中,确保装置的冗余性,并能够实现小型/轻量化的装置。
车辆的制动控制装置具备:“前轮电动马达(MTf),通过控制车辆的前轮(WHf)的轮缸(WCf)的液压(Pwf),调整上述前轮(WHf)的制动转矩(Tqf)”;“第一电动马达(MTk),调整上述车辆的右后轮(WHk)的制动转矩(Tqk)”;以及“第二电动马达(MTl),调整上述车辆的左后轮(WHl)的制动转矩(Tql)”。在车辆的制动控制装置中,上述前轮电动马达(MTf)具有两个系统线圈(CLx、CLy),上述第一电动马达、上述第二电动马达(MTk、MTl)具有一个系统线圈(CLk、CLl)。
车辆的制动控制装置具备控制器(ECU),上述控制器(ECU)控制上述前轮电动马达(MTf)、上述第一电动马达(MTk)、以及上述第二电动马达(MTl)。而且,上述控制器(ECU)具有:“对上述前轮电动马达(MTf)的两个系统线圈(CLx、CLy)中的一侧系统线圈通电的一侧前轮驱动电路(DFx)”、“对上述前轮电动马达(MTf)的两个系统线圈(CLx、CLy)中的另一侧系统线圈通电的另一侧前轮驱动电路(DFy)”、“对上述第一电动马达(MTk)的一个系统线圈(CLk)通电的第一后轮驱动电路(DRk)”、以及“对上述第二电动马达(MTl)的一个系统线圈(CLl)通电的第二后轮驱动电路(DRl)”。
根据上述结构,通过电动马达调整车辆的四个车轮的制动转矩。在前轮WHf中,通过两个系统的马达线圈CLx、CLy、以及对这些线圈中的每一个通电的一侧前轮驱动电路DFx、另一侧前轮驱动电路DFy确保冗余性。另外,在后轮WHr中,通过具有一个系统的马达线圈CLk的第一电动马达MTk、以及具有一个系统的马达线圈CLl的第二电动马达MTl,调整右后轮WHk的制动转矩Tqk、以及左后轮WHl的制动转矩Tql。虽然第一电动马达MTk、第二电动马达MTl的马达线圈CLk、CLl是一个系统,但由于在左右后轮设置有分别独立的电动马达MTk、MTl,所以作为后轮制动转矩Tqr确保了冗余性。因此,在制动控制装置SC中,在确保冗余性的基础上,整体被简化,实现小型/轻量化。
附图说明
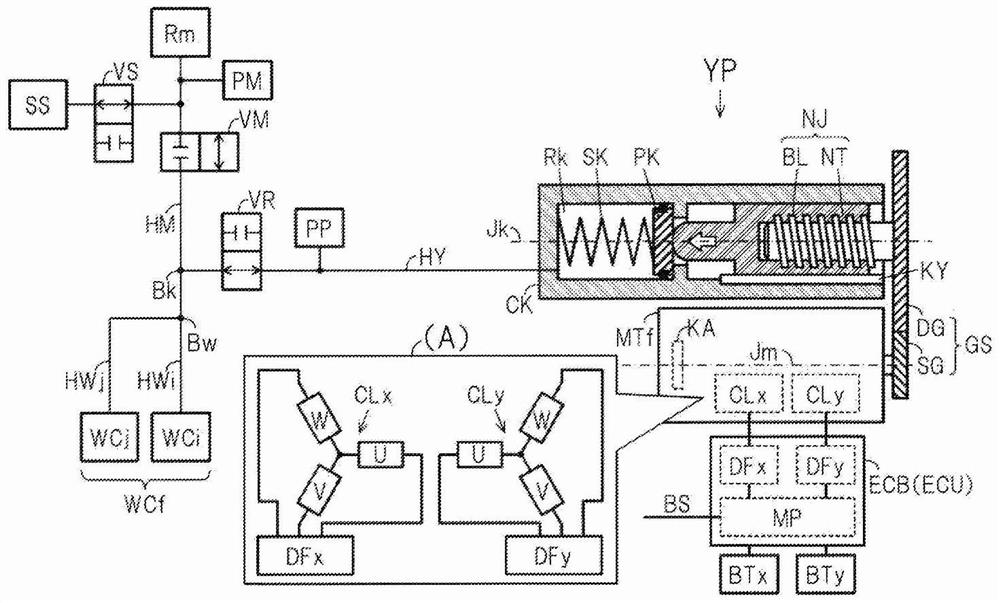
图1是用于说明制动控制装置SC的实施方式的整体结构图。
图2是用于对前轮致动器YP的第一例进行说明的示意图。
图3是用于对与前轮致动器YP的第一例对应的控制器ECU进行说明的示意图。
图4是用于对包含后轮控制器ECW的后轮致动器EMk、EMl的实施方式进行说明的示意图。
图5是用于对前轮致动器YP的第二例进行说明的示意图。
图6是用于对与前轮致动器YP的第二例对应的控制器ECU进行说明的示意图。
具体实施方式
<构成部件等的符号、符号末尾的下标>
在以下的说明中,如“WH”等,标注有同一符号的构成部件、运算处理、信号等具有同一功能。标注在各车轮所涉及的符号末尾的下标“i”~“l”是表示它与哪个车轮相关的总括符号。具体而言,“i”表示右前轮,“j”表示左前轮,“k”表示右后轮,“l”表示左后轮。例如,在四个旋转部件KT中,记作右前轮旋转部件KTi、左前轮旋转部件KTj、右后轮旋转部件KTk、以及左后轮旋转部件KTl。进一步,可以省略符号末尾的下标“i”~“l”。在省略了下标“i”~“l”的情况下,符号表示四个车轮的统称。例如,“WH”表示各车轮。
符号的末尾的下标“f”、“r”是表示在车辆的前后方向上,它与哪个方向相关的总括符号。具体而言,“f”表示前轮(=下标“i、j”),“r”表示后轮(=下标“k、l”)。例如,在车轮WH中,记作前轮WHf(=WHi、WHj)、以及后轮WHr(=WHk、WHl)。进一步,可以省略下标“f”、“r”。
前轮WHf的电气系统所涉及的符号末尾的下标“x”、“y”是表示在两个独立的电气系统中,它与哪个系统相关的符号。具体而言,在两个电气系统中,“x”表示一侧系统,“y”表示另一侧系统。例如,在电动马达MT的线圈CL中,记作一侧系统马达线圈CLx、以及另一侧系统马达线圈CLy。可以省略符号末尾的下标“x”、“y”。在省略了下标“x”、“y”的情况下,各符号表示统称。例如,“CL”表示各系统的马达线圈。
<车辆的制动控制装置的第一实施方式>
参照图1的整体结构图,对本发明所涉及的制动控制装置SC的实施方式进行说明。在搭载制动控制装置SC的车辆中,前轮WHf的制动转矩Tqf经由工作液体(制动液BF)产生,但在产生后轮WHr的制动转矩Tqr时,不使用制动液BF。即,前轮WHf具备液压式制动装置,后轮WHr具备电气-机械式制动装置(EMB:Electric-Mechanical Brake)。
在车辆设置有制动操作部件BP、旋转部件KT、前轮轮缸WCf、主储液器RV、主缸MC以及制动操作量传感器BA。
制动操作部件(例如,制动踏板)BP是驾驶员为了使车辆减速而操作的部件。通过操作制动操作部件BP,从而调整车轮WH的制动转矩Tq,在车轮WH产生制动力。具体而言,在车辆的车轮WH固定旋转部件(例如,制动盘)KT。而且,以夹住旋转部件KT的方式配置制动钳。
在前轮WHf中,在制动钳设置有轮缸WCf。通过前轮轮缸WCf内的制动液BF的压力(制动液压)Pwf增加,从而摩擦部件(例如,刹车片)按压于旋转部件KT。由于旋转部件KT和车轮WH被固定为一体旋转,所以通过此时产生的摩擦力,在前轮WHf产生制动转矩Tqf(摩擦制动力)。而且,通过制动转矩Tqf,在前轮WHf产生制动力。
主储液器(也称为“大气压储存器”)RV是工作液体用的罐,在其内部储藏有制动液BF。主缸MC经由制动杆RD等与制动操作部件BP机械连接。作为主缸MC,采用了单一型的主缸。在主缸MC的内部,通过主活塞PA形成有主缸室(液压室)Rm。在制动操作部件BP未被操作的情况下,主缸MC的液压室Rm与主储液器RV处于连通状态。
若制动操作部件BP被操作,则主缸MC内的主活塞PA被向前进方向Ha推动,主缸室Rm与储存器RV隔断。若进一步增加制动操作部件BP的操作,则主活塞PA向前进方向Ha移动,主缸室Rm的体积减少,制动液(工作流体)BF从主缸MC排出。若制动操作部件BP的操作减少,则主活塞PA向后退方向Hb移动,主缸室Rm的体积增加,制动液BF朝向主缸MC返回。
通过制动操作量传感器BA,检测由驾驶员进行的制动操作部件(制动踏板)BP的操作量Ba。具体而言,作为制动操作量传感器BA,采用检测主缸室Rm内的液压(主缸液压)Pm的主缸液压传感器PM、检测制动操作部件BP的操作位移Sp的操作位移传感器SP、以及检测制动操作部件BP的操作力Fp的操作力传感器FP中的至少一个传感器。换句话说,操作量传感器BA是主缸液压传感器PM、操作位移传感器SP以及操作力传感器FP的统称,操作量Ba是主缸液压Pm、操作位移Sp以及操作力Fp的统称。
主缸MC与轮缸WCf通过主缸流体路径HM以及轮缸流体路径HWf(=HWi、HWj)连接。在这里,流体路径是供作为工作液体的制动液BF移动的路径,适用于制动配管、流体单元的流路、软管等。主缸流体路径HM的一个端部与主缸MC(特别是,主缸室Rm)连接。主缸流体路径HM通过分岔部Bw分岔为两个,并与轮缸流体路径HWf连接。轮缸流体路径HWf的端部与前轮轮缸WCf(=WCi、WCj)连接。在主缸MC、轮缸WCf以及各流体路径HM、HWf充满制动液BF。
《制动控制装置SC》
制动控制装置SC包括主缸阀VM、行程模拟器SS、模拟器阀VS、主缸液压传感器PM、前轮致动器YP、后轮致动器EMr(=EMk、EMl)以及控制器ECU。此外,在流体路径HM、HWf中,将接近主缸MC的一侧称为“上部”,将接近轮缸WCf的一侧称为“下部”。
主缸阀VM(也称为“隔断阀”)设置于主缸流体路径HM。隔断阀VM是具有打开位置和关闭位置的常开型的电磁阀(开/关阀)。在“开/关阀”中,选择性地实现打开位置和关闭位置。在制动控制装置SC启动时,隔断阀VM成为关闭位置,主缸MC与轮缸WCf成为隔断状态(非连通状态)。
行程模拟器(也仅称为“模拟器”)SS是为了使制动操作部件BP产生操作力Fp而设置的。换言之,制动操作部件BP的操作特性(操作力Fp相对于操作位移Sp的关系)通过模拟器SS形成。在模拟器SS的内部,具备活塞以及弹性体(例如,压缩弹簧)。若制动液BF在模拟器SS内移动,则活塞被流入的制动液BF推动。由于通过弹性体对活塞在阻止制动液BF流入的方向上施加力,所以形成制动操作部件BP被操作的情况下的操作力Fp。
模拟器SS在隔断阀VM的上部与主缸MC(换句话说,主缸室Rm)连接。在主缸室Rm与模拟器SS之间设置模拟器阀VS。模拟器阀VS是具有打开位置和关闭位置的常闭型的电磁阀(开/关阀)。若制动控制装置SC被启动,则模拟器阀VS成为打开位置,主缸MC与模拟器SS成为连通状态。此外,在主缸室Rm的容量比轮缸WCf的容量充分大的情况下,也可以省略模拟器阀VS。
在隔断阀VM的上部设置主缸液压传感器PM,以检测主缸室Rm的液压(主缸液压)Pm。主缸液压传感器PM相当于操作量传感器BA,主缸液压Pm相当于操作量Ba。
前轮致动器YP经由连通流体路径HY在隔断阀(主缸阀)VM的下部(即,隔断阀VM与轮缸WCf之间的合流部)Bu与主缸流体路径HM连接。前轮致动器YP被前轮电动马达MTf驱动,调节隔断阀VM的下部的液压Pp。此时,对隔断阀VM进行通电,成为关闭位置。结果是,根据液压Pp控制轮缸WCf的液压(制动液压)Pwf。液压Pp被称为“调整液压”。设置调整液压传感器PP,以检测调整液压Pp。检测出的调整液压Pp被输入至控制器ECU。
在连通流体路径HY设置连通阀VR。连通阀VR是具有打开位置和关闭位置的常闭型的电磁阀(开/关阀)。若制动控制装置SC被启动,则连通阀VR成为打开位置,前轮致动器YP与轮缸WCf成为连通状态。
模拟器阀VS、隔断阀VM以及连通阀VR分别在电气上包含有两个系统的绕组(线圈)。各个阀线圈通过控制器ECU的一侧、另一侧的前轮驱动电路DFx、DFy通电。换句话说,模拟器阀VS、隔断阀VM以及连通阀VR在电气上被二重化。
主缸流体路径HM在分岔部Bw被分岔为轮缸流体路径HWi、HWj。在前轮WHf,从分岔部Bw到下部的结构相同。在轮缸流体路径HWf(=HWi、HWj)设置入口阀VIf(=Vii、VIj)。作为入口阀VIf,采用常开型的开/关电磁阀。
在入口阀VIf的下部(即,入口阀VIf与轮缸WCf之间),与减压流体路径HGf(=HGi、HGj)连接。另外,减压流体路径HGf与返回流体路径HR连接,最终与主储液器RV连接。在减压流体路径HGf设置出口阀VOf(=VOi、VOj)。作为出口阀VOf,采用常闭型的开/关电磁阀。
为了减少前轮轮缸WCf内的液压Pwf,通过防抱死制动控制等,将入口阀VIf设为关闭位置,将出口阀VOf设为打开位置。制动液BF从入口阀VIf的流入被阻止,而轮缸WCf内的制动液BF流出到主储液器RV,制动液压Pwf减少。另外,为了增加制动液压Pwf,将入口阀VIf设为打开位置,将出口阀VOf设为关闭位置。制动液BF向主储液器RV的流出被阻止,而由前轮致动器YP调节后的调整液压Pp被导入轮缸WCf,制动液压Pwf增加。进一步,为了保持轮缸WCf内的液压(制动液压)Pwf,入口阀VIf以及出口阀VOf均成为关闭位置。换句话说,通过控制电磁阀VIf、VOf,能够独立地调整前轮WHf的液压Pwf(即,前轮制动转矩Tqf)。
在车辆的后轮WHr(=WHk、WHl)具备后轮致动器EMr(=EMk、EMl)。在后轮致动器EMr设置后轮电动马达MTr(=MTk、MTl)。在后轮致动器EMr中,通过后轮电动马达MTr直接控制后轮制动转矩Tqr(=Tqk、Tql),而不利用制动液BF的压力。具体而言,后轮电动马达MTr的旋转动力被转换为直线动力,摩擦部件按压旋转部件KTr(=KTi、KTj),产生后轮制动转矩Tqr。
控制器(也称为“电子控制单元”)ECU包括安装有微处理器MP、和多个驱动电路DF、DR的电路基板、以及被编程为微处理器MP的控制算法。通过控制器ECU,基于各种信号(Ba等)控制电动马达(MTf等)以及电磁阀(VM等)。具体而言,基于微处理器MP内的控制算法,来运算用于控制电磁阀VM、VR、VS、VI、VO的电磁阀驱动信号Vm、Vr、Vs、Vi、Vo。同样地,运算用于控制电动马达MT的马达驱动信号Mt。而且,基于这些驱动信号(Vm、Mt等)驱动多个电磁阀、电动马达。
另外,控制器ECU可以分割为前轮WHf所涉及的前轮控制器ECB、以及后轮WHr所涉及的后轮控制器ECW(该结构可称作“分割结构”)。在该情况下,在控制器ECU中,前轮控制器ECB和后轮控制器ECW经由车载通信总线BS网络连接。从车载的电源(蓄电池等)对控制器ECU供给电力。
<前轮致动器YP的第一例>
参照图2的示意图(未图示VI、VO),对前轮致动器YP的第一例进行说明。在图中,示出制动控制装置SC的工作中的状态。换句话说,对开/关电磁阀VS、VM、VR进行通电,电磁阀VS、VR被开阀,电磁阀VM被闭阀。因此,主缸室Rm与模拟器SS连接,制动操作部件BP的操作特性由模拟器SS形成。此外,在图中,在控制器ECU中,采用上述分割结构(ECB和ECW)。
前轮致动器YP包括由前轮控制器ECB(控制器ECU的一部分)驱动的前轮电动马达MTf、减速器GS、旋转/直线运动转换机构(例如,丝杠机构)NJ、调压活塞PK、调压缸CK以及复位弹簧SK。前轮致动器YP在隔断阀VM与前轮轮缸WCf的主缸室Rm之间(隔断阀VM的下部Bk),经由连通阀VR与主缸流体路径HM连接。
前轮电动马达MTf是前轮致动器YP的驱动源。通过电动马达MTf的旋转动力,来调节隔断阀VM的下部的液压(调整液压)Pp。电动马达MTf由前轮控制器ECB驱动。
从车载的电源(蓄电池BT等)对前轮控制器ECB供给电力。例如,蓄电池被二重化为一侧蓄电池BTx、另一侧蓄电池BTy。控制器ECB包含微处理器MP、一侧前轮驱动电路DFx、另一侧前轮驱动电路DFy而构成。
在微处理器MP编程有驱动前轮驱动电路DFx、DFy的开关元件(MOS-FET、IGBT等功率半导体器件)的控制算法。微处理器MP与通信总线BS连接,在与后轮控制器ECW等之间共享信息。此外,在微处理器MP中,也为了确保其冗余性,而进行二重化。
如排出部(A)所示,前轮电动马达MTf包含两个系统的绕组组CLx、CLy而构成。一侧马达绕组组(也称为“一侧马达线圈”)CLx通过控制器ECB的一侧驱动电路DFx通电。另外,另一侧马达绕组组(也称为“另一侧马达线圈”)CLy通过控制器ECB的另一侧驱动电路DFy通电。因此,电动马达MTf通过一侧驱动电路DFx以及另一侧驱动电路DFy中的至少一个驱动。由于在电动马达MTf中采用冗余(二重系统)的结构,所以即使“一侧马达线圈CLx、一侧驱动电路DFx或其所涉及的部件”、以及“另一侧马达线圈CLy、另一侧驱动电路DFy或其所涉及的部件”中的任意一个工作状态不佳,电动马达MTf也能够工作。换句话说,前轮电动马达MTf通过两个系统的马达线圈CLx、CLy在电气上二重化。
例如,作为电动马达MTf,采用三相无刷马达。在无刷马达MTf设置检测马达的转子位置(旋转角)Ka的旋转角传感器KA。在一侧马达线圈CLx以及另一侧马达线圈CLy分别形成三相(U相、V相、W相)的线圈组(绕组组)。基于旋转角(实际值)Ka,依次切换两个三相马达线圈CLx、CLy的通电方向(即,励磁方向),旋转驱动无刷马达MTf。此外,为了确保冗余性,旋转角传感器KA也可以采用两组检测部。
实际的旋转角Ka能够通过公知的方法(例如,进行120度通电检测感应电压过零的方法、利用中性点电位的方法、利用dq旋转坐标模型的推断感应电压的方法、对αβ固定坐标模型应用扩展卡尔曼滤波器的方法、利用状态观察器的方法)来推断。因此,在推断运算旋转角Ka的情况下,也可以省略旋转角传感器KA。
减速器GS包括小径齿轮SG以及大径齿轮DG。通过减速器GS,电动马达MTf的旋转动力被减速,并传递至丝杠机构NJ。具体而言,小径齿轮SG被固定于电动马达MT的输出轴Jm。小径齿轮SG与大径齿轮DG啮合。以大径齿轮DG的旋转轴Jk与丝杠机构NJ的螺栓部件BL的旋转轴Jk一致的方式固定大径齿轮DG和螺栓部件BL。即,在减速器GS中,来自电动马达MTf的旋转动力被输入至小径齿轮SG,该旋转动力被减速并从大径齿轮DG输出至丝杠机构NJ。
丝杠机构(旋转/直线运动转换机构)NJ包括螺栓部件BL以及螺母部件NT。通过丝杠机构NJ,减速器GS的旋转动力转换为调压活塞PK的直线动力。具体而言,螺栓部件BL与大径齿轮DG同轴固定,通过螺栓部件BL的旋转,与其螺合的螺母部件NT移动。通过调压活塞PK被螺母部件NT推动,转换为调压活塞PK的直线动力。在这里,由于螺母部件NT的旋转运动被销部件KY约束,所以螺母部件NT在大径齿轮DG的旋转轴Jk(调压缸CK的中心轴线)的方向上移动。而且,调压活塞PK被螺母部件NT按压。作为丝杠机构NJ,采用梯形螺纹等“滑动螺钉”。另外,作为丝杠机构NJ,可以采用滚珠丝杠等“滚动螺钉”。
调压活塞PK被插入至调压缸CK的内孔,形成活塞/气缸的组合。具体而言,通过“调压缸CK的内周面、底面”以及“调压活塞PK的端面”形成液压室Rk(称为“调压室”)。调压室Rk经由连通流体路径HY与主缸流体路径HM连接。通过调压活塞PK移动,从而调压室Rk的体积发生变化。此时,由于连通阀VR成为打开位置,且隔断阀VM成为关闭位置,所以制动液BF不移动到主缸室Rm,而是相对于轮缸WCf移动。
若电动马达MTf被向正转方向旋转驱动,则调压室Rk的体积减少,制动液BF从调压缸CK向轮缸WCf移动。由此,调整液压Pp(即,制动液压Pwf)增加,且前轮制动转矩Tqf增加。另一方面,若电动马达MTf被向反转方向旋转驱动,则调压室Rk的体积增加,制动液BF从轮缸WCf返回到调压缸CK。由此,调整液压Pp(=Pwf)减少,且前轮制动转矩Tqf减少。在连通流体路径HY设置调整液压传感器PP,以检测调整液压Pp。此外,在调压室Rk内设置复位弹簧(弹性体)SK,在停止对电动马达MTf的通电的情况下,调压活塞PK返回到其初始位置。
<与前轮致动器YP的第一例对应的控制器ECU等的结构>
参照图3的示意图,对与前轮致动器YP的第一例对应的控制器ECU(特别是,前轮驱动电路DFx、DFy)、前轮电动马达MTf、隔断阀VM、连通阀VR以及模拟器阀VS的结构进行说明。
从电源(蓄电池)BTx、BTy对前轮控制器ECB(控制器ECU的一部分)供给电力。通过控制器ECB,驱动电动马达MTf、隔断阀VM、连通阀VR以及模拟器阀VS。控制器ECB包含微处理器MP以及前轮驱动电路DFx、DFy而构成。在微处理器MP编程有用于控制电动马达MTf、隔断阀VM、连通阀VR以及模拟器阀VS的算法。
为了提高制动控制装置SC的信赖度,微处理器MP被二重化。另外,驱动电动马达MTf、隔断阀VM、连通阀VR以及模拟器阀VS的电路被冗余化为驱动电路DFx、DFy。进一步,为了使电动马达MTf、电磁阀VM、VR、VS小型化,驱动电路DFx、DFy包含升压电路SH(DC/DC转换器)。通过升压电路SH,电动马达MTf、电磁阀(VM等)的驱动电压高于蓄电池BT等的电压(电源电压)。另外,通过升压电路SH,可以仅增加电动马达MTf的驱动电压,电磁阀的驱动电压保持电源电压。进一步,也可以省略一侧前轮驱动电路DFx、另一侧前轮驱动电路DFy的升压电路SH(即,控制器ECB不包含升压电路SH)。
在一侧前轮驱动电路DFx、另一侧前轮驱动电路DFy,通过开关元件(MOS-FET、IGBT等功率半导体器件)形成三相(U相、V相、W相)的电桥电路,以驱动前轮电动马达MTf。基于马达驱动信号Mt,控制前轮驱动电路DFx、DFy的各开关元件的通电状态,并控制电动马达MTf的输出。进一步,前轮驱动电路DFx、DFy包含驱动隔断阀VM、连通阀VR以及模拟器阀VS的电路。各电磁阀基于驱动信号Vm、Vr、Vs,来控制(驱动)它们的线圈的励磁状态(通电状态)。
前轮电动马达MTf包含两个系统的绕组组(线圈)CLx、CLy而构成。两个系统线圈中的一侧前轮马达线圈CLx通过一侧前轮驱动电路DFx通电。另外,两个系统线圈中的另一侧前轮马达线圈CLy通过另一侧前轮驱动电路DFy通电。因此,前轮电动马达MTf通过两个前轮驱动电路DFx、DFy中的至少一个来驱动。由于在前轮电动马达MTf中采用冗余(二重系统)的结构,所以即使“一侧前轮马达线圈CLx、一侧前轮驱动电路DFx或其所涉及的部件”以及“另一侧轮马达线圈CLy、另一侧前轮驱动电路DFy或其所涉及的部件”中的任意一个成为工作状态不佳,前轮电动马达MTf也能够工作。换句话说,前轮电动马达MTf通过具有两个系统线圈CLx、CLy,从而在电气化上被二重化。
常开型的隔断阀VM包含两个绕组(线圈)CMx、CMy而构成。一侧主缸阀线圈CMx通过一侧前轮驱动电路DFx通电,另一侧主缸阀线圈CMy通过另一侧前轮驱动电路DFy通电。常闭型的模拟器阀VS包含两个绕组(线圈)CSx、CSy而构成。一侧模拟器阀线圈CSx通过一侧前轮驱动电路DFx通电,另一侧模拟器阀线圈CSy通过另一侧前轮驱动电路DFy通电。常闭型的连通阀VR包含两个绕组(线圈)CRx、Cry而构成。一侧连通阀线圈CRx通过一侧前轮驱动电路DFx通电,另一侧连通阀线圈Cry通过另一侧前轮驱动电路DFy通电。因此,电磁阀VM、VS、VR通过前轮驱动电路DFx、DFy中的至少一个来驱动。与前轮电动马达MTf同样地,电磁阀VM、VS、VR也在电气上被二重化。此外,在主缸MC的容量(体积)充分大,省略模拟器阀VS的情况下,省略模拟器阀VS所涉及的部件。
如以上说明的那样,在前轮WHf中,通过两个系统的马达线圈CLx、CLy、两个系统的主缸阀线圈CMx、CMy、两个系统的模拟器阀线圈CSx、CSy、两个系统的连通阀线圈CRx、Cry、以及对这些线圈中每一个进行通电的一侧前轮驱动电路DFx、另一侧前轮驱动电路DFy,在电气上二重化。在上述结构中,由于未进行基于多个构成部件(MTf等)的二重化,所以作为整体,维持制动控制装置SC的小型/轻量,并且在确保前轮制动转矩Tqf时,确保冗余性。
<后轮致动器EMr>
参照图4,对包含后轮控制器ECW(控制器ECU的一部分)的后轮致动器EMr(第一后轮致动器EMk、第二后轮致动器EMl)进行说明。在制动控制装置SC中,通过后轮电动马达MTr(第一电动马达MTk、第二电动马达MTl),不经由制动液BF来进行后轮WHr(第一后轮WHk、第二后轮WHl)的制动转矩Tqr(=Tqk、Tql)的产生以及调整。由于右后轮WHk和左后轮WHl是相同的结构,所以对右后轮WHk进行说明。此外,[]内的符号是与左后轮WHl对应的记载。
在右后轮WHr,也与前轮WHf同样地设置旋转部件KT、摩擦部件MS。右后轮致动器EMk包括制动钳CP、右后轮电动马达MTk(相当于“第一电动马达”)、后轮控制器ECW、蓄电池BTk、减速器GS、旋转/直线运动转换机构NJ、制动活塞PN以及按压力传感器FB。制动钳CP被设置为夹住右后轮WHk的旋转部件KTk。在制动钳CP内置有电动马达MTk等。
电动马达MTk是用于调整右后轮WHk的制动转矩Tqk的动力源。在右后轮电动马达MTk,与前轮电动马达MTf不同,包含一个系统的马达线圈CLk。在采用无刷马达作为电动马达MTk的情况下,通过如排出部(B)所示的三相线圈CLk,驱动电动马达MTk。
在制动钳CP内设置有后轮控制器ECW,以驱动右后轮电动马达MTk。后轮控制器ECW包含微处理器MP以及右后轮驱动电路DRk。在微处理器MP编程有控制算法,以控制右后轮驱动电路DRk(相当于“第一后轮驱动电路”)。此外,通信总线BS连接为与控制器ECB、左后轮WHl的后轮控制器ECW共享信息(信号)。通过右后轮驱动电路DRk,驱动右后轮马达线圈CLk,控制对右后轮马达MTk的通电量。
在制动钳CP内设置右后轮蓄电池BTk。蓄电池BTk经由电力线PL从车体侧的蓄电池BT进行电力供给,进行充电。通过蓄电池BTk,对控制器ECW(最终,对电动马达MTk)供给电力。可以省略蓄电池BTk。在该情况下,通过电力线PL,从车体侧的蓄电池BT对控制器ECW直接供电。
后轮电动马达MTk的旋转输出与参照图2说明的前轮致动器YP相同,经由减速器GS以及旋转/直线运动转换机构(丝杠机构)NJ转换为制动活塞PN的推力(空心箭头的方向的力)。制动活塞PN将摩擦部件(制动片)MS按压于旋转部件(制动盘)KT。此时,通过在摩擦部件MS与旋转部件KT之间产生的摩擦力,在右后轮WHk产生制动转矩Tqk。在右后轮致动器EMk设置按压力传感器FB,以检测摩擦部件MS按压旋转部件KT的力亦即按压力Fb。
以上,对右后轮WHk的致动器EMk进行了说明。对于左后轮WHl的致动器EMl,在上述说明中,将下标“k”代替为下标“l”相当于左后轮致动器EMl的说明。因此,左后轮电气制动器MTl(相当于“第二电动马达”)由左后轮驱动电路DRl(相当于“第二后轮驱动电路”)来控制。
前轮WHf所涉及的构成要素(YP、ECB等)搭载于车体侧,但后轮致动器EMr(=EMk、EMl)搭载于车轮侧。因此,在后轮致动器EMr中,为了提高搭载性,小型/轻量特别重要。在后轮致动器EMr中,与前轮WHf(=WHi、WHj)用的前轮电动马达MTf不同,在电气上是一个系统。在后轮电动马达MTr(即,第一电动马达MTk、第二电动马达MTl)、以及控制器ECW(控制器ECU的一部分)内的后轮驱动电路DRr(即,第一后轮驱动电路DRk、第二后轮驱动电路DRl)中,不采用电气二重化。这基于后轮WHr中的制动转矩Tqr的产生通过左右的后轮致动器EMr二重化。通过上述结构,在后轮WHr中,能够确保搭载性,并且实现对于制动转矩Tqr的确保的冗余性。
<前轮致动器YP的第二例>
参照图5的示意图(未图示VI、VO)对前轮致动器YP的第二例进行说明。图中为制动控制装置SC工作时,对电磁阀VS、VM、VR进行通电,示出控制器ECU的分割结构(ECU=ECB+ECW)。在前轮致动器YP的第一例中,前轮电动马达MTf的旋转动力被转换为调压缸CK内的调压活塞PK的直线动力(推力),调整调整液压Pp(=Pwf)。在前轮致动器YP的第二例中,通过前轮电动马达MTf的旋转动力,形成制动液BF的环流(循环的制动液BF的流动),通过调压阀UA调节调整液压Pp(=Pwf)。
如上所述,标注有同一符号的构成部件等为同一功能的结构。对于标注在各车轮所涉及的符号末尾的下标“i”~“l”而言,“i”表示右前轮,“j”表示左前轮,“k”表示右后轮,“l”表示左后轮。另外,对于符号末尾的下标“f”、“r”而言,“f”表示前轮(=下标“i、j”),“r”表示后轮(=下标“k、l”)。对于前轮的电气系统所涉及的符号末尾的下标“x”、“y”而言,“x”表示一侧系统,“y”表示另一侧系统。可以省略下标“i”~“l”、“f”、“r”、“x”、“y”。在省略了这些下标的情况下,各符号表示统称。以下,以与第一例的不同点为中心进行说明。
通过前轮致动器YP调整前轮轮缸WCf的液压(制动液压)Pwf。前轮致动器YP具备电动泵(=MTf+HP)、循环流体路径HK、逆止阀GC、调压阀UA以及调整液压传感器PP。在前轮致动器YP中,电动泵排出的制动液BF被调压阀UA调节为调整液压Pp。调节了调整液压Pp后的制动液BF被经由连通阀VR供给至前轮轮缸WCf。
电动泵由前轮电动马达MTf以及流体泵HP构成。在电动泵中,将电动马达MTf和流体泵HP固定为电动马达MTf与流体泵HP一体旋转。电动马达MTf基于驱动信号Mt由前轮控制器ECB控制。
在流体泵HP中,吸入部Qs和排出部Qt经由循环流体路径HK连接。在流体泵HP的吸入部Qs连接有储存器流体路径HR。因此,制动液BF从主储液器RV通过储存器流体路径HR被吸入到吸入部Qs,并从排出部Qt排出至循环流体路径HK。在循环流体路径HK设置逆止阀GC(也称为“检查阀”)。
若驱动前轮电动马达MTf,则如虚线箭头所示,制动液BF按照“(a)→(b)→(c)→(d)→(a)”的顺序在循环流体路径HK中流动。在循环流体路径HK设置调压阀UA。调压阀UA是基于通电状态(例如,供给电流)连续地控制开阀量(升程量)的线性电磁阀(也称为“比例阀”或“差压阀”)。调压阀UA基于驱动信号Ua由控制器ECB控制。作为调压阀UA,可采用常开型的电磁阀。通过利用调压阀UA节流制动液BF的流动(环流),来进行调整液压Pp的调节(所谓的,调压阀UA的节流效应)。为了检测调整液压Pp,而设置调整液压传感器PP。
循环流体路径HK中的调压阀UA与逆止阀GC之间(c)经由连通流体路径HY连接到主缸流体路径HM中的隔断阀VM的下部Bk。在连通流体路径HY设置常闭型的连通阀VR。在制动时,对连通阀VR通电,主缸流体路径HM与循环流体路径HK处于连通状态。因此,轮缸WCf的制动液压Pwf(结果是,前轮制动转矩Tqf)通过前轮致动器YP调节为调整液压Pp。
此外,常闭型的连通阀VR用于在完全断电的情况下,手动制动(仅通过驾驶员的操作力Fp进行的制动)制动液压Pwf。因此,连通阀VR也可以代替设置于连通流体路径HY,而如用虚线所示的那样设置于循环流体路径HK。
<与前轮致动器YP的第二例对应的控制器ECU等的结构>
参照图6的示意图,对与前轮致动器YP的第二例对应的控制器ECU(特别是,前轮驱动电路DFx、DFy)、前轮电动马达MTf、隔断阀VM、连通阀VR、模拟器阀VS以及调压阀UA的结构进行说明。在第二例的控制器ECU结构中,为了通过调压阀UA节流制动液BF的环流,来调整调整液压Pp,而对第二例的控制器ECU结构添加调压阀UA。对于其它部分,基本上与第一例的控制器ECU的结构相同。
从电源(蓄电池)BTx、BTy对前轮控制器ECB(控制器ECU的一部分)供给电力。通过控制器ECB,驱动前轮电动马达MTf、隔断阀VM、连通阀VR、模拟器阀VS以及调压阀UA。控制器ECB包含被二重化的微处理器MP以及驱动电路DFx、DFy而构成。进一步,为了使电动马达MTf、电磁阀VM、VR、VS、UA小型化,前轮驱动电路DFx、DFy包含升压电路SH(DC/DC转换器)。
在一侧前轮驱动电路DFx、另一侧前轮驱动电路DFy形成三相电桥电路,基于马达驱动信号Mt来控制电动马达MTf的输出。驱动电路DFx、DFy包含驱动电磁阀VM、VR、VS、UA的电路,基于驱动信号Vm、Vr、Vs、Ua来控制线圈的励磁状态。
前轮电动马达MTf包含两个系统线圈CLx、CLy,被二重化。一侧前轮马达线圈CLx通过一侧前轮驱动电路DFx通电,另一侧前轮马达线圈CLy通过另一侧前轮驱动电路DFy通电。换句话说,前轮电动马达MTf由两个前轮驱动电路DFx、DFy中的至少一个驱动。
常开型的隔断阀VM包含两个线圈CMx、CMy,被二重化。一侧主缸阀线圈CMx通过驱动电路DFx通电,另一侧主缸阀线圈CMy通过驱动电路DFy通电。常闭型的模拟器阀VS包含两个线圈CSx、CSy,被二重化。一侧模拟器阀线圈CSx通过驱动电路DFx通电,另一侧模拟器阀线圈CSy通过驱动电路DFy通电。常闭型的连通阀VR包含两个绕组(线圈)CRx、CRy,被二重化。一侧连通阀线圈CRx通过驱动电路DFx通电,另一侧连通阀线圈Cry通过驱动电路DFy通电。常闭型的调压阀UA包含两个线圈CAx、CAy,被二重化。一侧调压阀线圈CAx通过驱动电路DFx通电,另一侧调压阀线圈Cay通过驱动电路DFy通电。因此,电磁阀VM、VS、VR、UA由驱动电路DFx、DFy中的至少一个驱动。与前轮电动马达MTf相同,电磁阀VM、VS、VR、UA也在电气上二重化。此外,在主缸MC的容量(体积)充分大,可省略模拟器阀VS的情况下,可省略模拟器阀VS所涉及的部件。
如以上说明的那样,在第二例的前轮致动器YP中,也通过两个系统的前轮马达线圈CLx、CLy、两个系统的主缸阀线圈CMx、CMy、两个系统的模拟器阀线圈CSx、CSy、两个系统的连通阀线圈CRx、Cry、两个系统的调压阀线圈CAx、CAy以及对这些线圈中的每一个通电的一侧前轮驱动电路DFx、另一侧前轮驱动电路DFy,在电气上二重化。在上述结构中,由于未进行基于多个构成部件(MTf等)的二重化,所以在维持制动控制装置SC的小型/轻量的基础上,在确保前轮制动转矩Tqf时,确保冗余性。
<作用/效果>
在制动控制装置SC中,前轮制动转矩Tqf(=Tqi、Tqj)通过经由制动液BF的制动液压Pwf来调节。另一方面,后轮制动转矩Tqr未利用制动液BF,而通过两个后轮电动马达MTk、MTl来调节。制动液压Pwf(=Pwi、Pwj)通过一个前轮电动马达MTf调整。因此,前轮电动马达MTf具有两个系统线圈CLx、CLy。与此相对,后轮制动转矩Tqr(=Tqk、Tql)分别通过第一电动马达MTk、第二电动马达MTl来调整。在后轮WHr中,由于通过两个电动马达(第一电动马达、第二电动马达)MTk、MTl二重化,所以第一电动马达MTk、第二电动马达MTl分别具有一个系统线圈CLk、CLl。前轮电动马达MTf、第一电动马达MTk以及第二电动马达MTl由控制器ECU控制。控制器ECU包含“对前轮电动马达MTf的两个系统线圈CLx、CLy中的一侧通电的一侧前轮驱动电路DFx”、“对前轮电动马达MTf的两个系统线圈CLx、CLy中的另一侧通电的另一侧前轮驱动电路DFy”、“对第一电动马达MTk的一个系统线圈CLk通电的第一后轮驱动电路DRk”、以及“对第二电动马达MTl的一个系统线圈CLl通电的第二后轮驱动电路DRl”而构成。
根据上述结构,通过电动马达MT调整四个车轮WH的制动转矩Tq。前轮WHf所涉及的构成要素(MTf等)在电气上被二重化,但后轮WHr的一个轮所涉及的构成要素(MTk等)在电气上一重。这基于在后轮WHr中,左右电独立。通过该结构,在电动化的制动控制装置SC中,在确保装置的冗余性的基础上,实现小型/轻量化。
此外,在上述的说明中,控制器ECU被分割为前轮控制器ECB和后轮控制器ECW。代替于此,后轮控制器ECW也可以是包含于设置于车体侧的前轮控制器ECB的结构。在该情况下,控制器ECB(=ECU)包含被冗余化的微处理器MP以及驱动电路DFx、DFy、DRk、DRl(参照图1)。即使是该结构,也起到上述同样的效果。
- 用于控制车辆的制动设备的控制装置、车辆的制动设备、用于运行控制装置的方法和用于以制动压力加载车辆的制动设备的至少一个制动装置的方法
- 用于轨道车辆的制动设备的制动控制装置,制动设备,轨道车辆以及用于运行制动控制装置的方法