电力转换装置以及具备该装置的电动车辆系统
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及一种电力转换装置以及具备该电力转换装置的电动车辆系统。
背景技术
在用于交流电动机的电力转换装置中,由于用于控制的传感器信号值的误差、逆变器的输出电压误差等,会产生在流过电动机的相电流上重叠比基波频率慢的低频分量的电流差拍现象。该现象成为电动机的输出转矩的脉动、效率恶化的原因。
另外,由于相电流因电流差拍而偏移,因此流过比相电流的振幅值大的电流。通常,由于在逆变器中安装有过电流保护功能,因此还存在过电流保护因电流差拍而工作,导致逆变器停止的问题。
特别是在逆变器的开关频率相对于流过电动机的电流的基波频率不足够高的情况下,逆变器的正侧输出和负侧输出产生电压差,产生电流差拍。
在驱动高旋转型的电动机的情况下,流过电动机的电流的基波频率高,电动机的阻抗小,因此产生大的电流差拍。
作为针对电流差拍的对策,提出了下述方法。
在专利文献1中记载了如下方法:作为电流差拍的抑制装置,通过高通滤波器(HPF)提取d-q轴上的脉动分量,通过对它们进行三相变换,计算三相各相的电流差拍分量,通过对计算出的电流差拍分量进行比例积分运算(PI补偿)来补偿三相电压指令。
在专利文献2中记载了如下方法:从三相电流的实际值减去将d-q轴电流指令值进行三相变换后的值,从而提取电流差拍分量,使用PLL(Phase Locked Loop(锁相环)),将电流差拍分量转换为振幅和相位,来抑制电流差拍。
在专利文献3中记载了如下方法:通过高通滤波器(HPF)提取旋转坐标系中的脉动分量,对它们进行三相变换,由此计算三相各相的电流差拍分量,通过对电流差拍分量进行比例运算(P补偿)来补偿三相电压指令。
在专利文献4中记载了如下方法:通过电压传感器检测逆变器的直流电压,根据检测出的电压信号运算纹波频率,使用仅放大该纹波频率分量的控制器,来补偿d-q轴电压指令值。
现有技术文献
专利文献
专利文献1:日本专利特开2010-063335号公报
专利文献2:日本专利特开2017-017817号公报
专利文献3:日本专利特开2004-104898号公报
专利文献4:日本专利特开2018-113770号公报
发明内容
发明要解决的问题
但是,在专利文献1所记载的方式中,在电流差拍分量的提取中使用HPF、使用PI补偿器,因此需要HPF的截止频率、PI补偿器的增益的适配作业。这成为电力转换装置的开发工时增加的主要原因。另外,在难以产生电流差拍的低旋转区域中,在假定的电流差拍分量的频率与基波频率大致相等的情况下,有可能将基波分量检测为电流差拍分量。在这种情况下,需要停止针对电流差拍分量的补偿动作,有可能对电动机的转矩控制不可缺少的电流控制系统的动作产生影响。
另外,在专利文献2所记载的方式中,使用PLL,将电流差拍分量转换为振幅和相位。在该方式中,在电流差拍分量的频率未知的情况下,存在响应慢的问题。
另外,在专利文献3所记载的方式中,由于使用P补偿器,所以在原理上不能完全抑制电流差拍分量。
进而,在专利文献4所记载的方式中,能够抑制由逆变器的直流电压的脉动引起的电流差拍现象,但不能抑制由于除此之外的原因而产生的电流差拍现象。
本发明的目的在于实现一种不需要适配作业,无论电动机处于何种运转状态都能够抑制电流差拍的电力转换装置以及具备该装置的电动车辆系统。
解决问题的技术手段
为了达成上述目的,本发明如下进行构成。
在电力转换装置中,具备:逆变器,其将直流电压转换为交流电压来驱动交流电动机;以及差拍补偿部,其抑制所述逆变器的输出电流的电流差拍分量,所述差拍补偿部具有:差拍提取部,其运算所述逆变器的输出电流的差拍分量;以及差拍补偿电压运算部,其根据所述差拍提取部所运算出的差拍分量来推定差拍补偿电压,所述电力转换装置基于所述差拍补偿电压运算部所推定出的差拍补偿电压来抑制所述逆变器的输出电流的电流差拍分量。
在电动车辆系统中,具备:电动机,其驱动车辆以及电动机控制装置,其控制所述电动机,所述电动机控制装置具有电力转换装置,所述电力转换装置具有:逆变器,其将直流电压转换为交流电压来驱动交流电动机;以及差拍补偿部,其抑制所述逆变器的输出电流的电流差拍分量,所述差拍补偿部具有:差拍提取部,其运算所述逆变器的输出电流的差拍分量;以及差拍补偿电压运算部,其根据所述差拍提取部所计算出的差拍分量来推定差拍补偿电压,所述电力转换装置基于所述差拍补偿电压运算部所推定出差拍补偿电压来抑制所述逆变器的输出电流的电流差拍分量。
发明的效果
根据本发明,能够实现不需要适配作业,无论电动机处于何种运转状态都能够抑制电流差拍的电力转换装置以及具备该装置的电动车辆系统。
上述以外的课题、构成以及效果通过以下的实施方式的说明而明确。
附图说明
图1是表示实施例1的电力转换装置的概略电路构成的图。
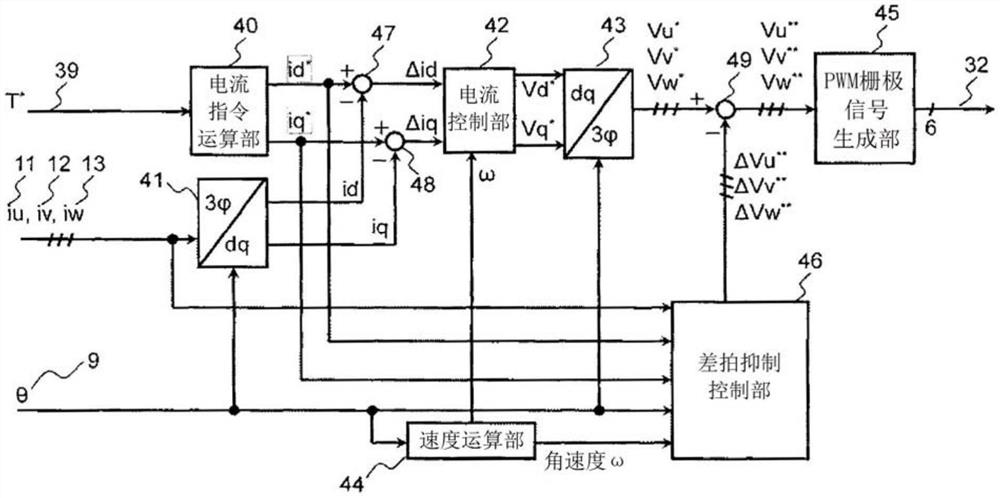
图2是说明实施例1的控制器的处理的处理框图。
图3是表示由于逆变器的正侧输出与负侧输出的电压差而产生了电流差拍时的三相电流波形(实验波形)的图。
图4是表示实施例1的差拍抑制控制部的处理内容的内部框图。
图5是表示实施例2的差拍抑制控制部的处理内容的内部框图。
图6是说明实施例2中的输出调整处理部的处理的座标图。
图7是实施例3的电动车辆系统的概略构成图。
具体实施方式
以下,参照附图说明本发明的实施方式。另外,在各图中,对于相同的要素标记相同的符号,省略重复的说明。
实施例
(实施例1)
图1是表示本发明的实施例1的电力转换装置的概略电路构成的图。
在图1中,电动机2的电力转换装置主要由逆变器1、电池3以及控制器4等构成。
逆变器1是三相电压型两电平逆变器。
电动机2与后述的电动车辆系统的驱动机构连接,通过电动机2旋转来推进车辆。本实施例1的电动机2是交流电动机,是三相埋入磁铁型同步电动机(IPMSM)。电动机2通过由设置在未图示的转子上的永久磁铁产生的磁通与由流过固定在电枢上的三相绕组5、6、7的电流iu、iv、iw产生的磁场的相互作用而动作。iu、iv、iw分别是U相电流、V相电流、W相电流。
电动机2包括磁极位置传感器8。磁极位置传感器8具有检测电动机2的转子的磁极位置作为旋转角度的功能。磁极位置传感器8输出磁极位置信号9(θ),并输入到控制器4。关于磁极位置信号9(θ)在控制器4中的处理将在后面使用图2进行说明。
电流传感器10检测流过绕组5、6、7的电流,基于此输出U相电流传感器信号11(表示电流iu的信号)、V相电流传感器信号12(表示电流iv的信号)、W相电流传感器信号13(表示电流iw的信号),并输入到控制器4。
电流传感器信号11、12、13在控制器4中的处理也使用图2在后面进行说明。
逆变器1包含开关元件14、15、16、17、18、19和续流二极管20、21、22、23、24、25。本实施例1的开关元件14~19是Si-IGBT,包括栅极端子、集电极端子、发射极端子。续流二极管20~25连接在开关元件14~19各自的集电极端子和发射极端子之间。
关于续流二极管20~25,在开关元件14~19的集电极端子成为比发射极端子高的电位的情况下,通过续流二极管20~25流过电流,防止对开关元件14~19施加高的逆电压。开关元件14~19的导通和截止的切换通过与各个开关元件14~19的栅极端子连接的栅极驱动信号26、27、28、29、30、31来进行。
成为各个栅极驱动信号26~31的基础的由6条构成的栅极信号32由控制器4生成并输出到栅极驱动电路35。栅极驱动电路35将栅极信号32转换为开关元件14、15、16、17、18、19的导通和截止的切换所需要的电位,并输出栅极驱动信号26、27、28、29、30、31。控制器4中的栅极信号32的生成将在后面使用图2进行说明。
开关元件14的发射极端子和开关元件15的集电极端子相互连接,其连接点与绕组5连接并流过电流iu。开关元件16的发射极端子和开关元件17的集电极端子相互连接,其连接点与绕组6连接并流过电流iv。开关元件18的发射极端子和开关元件19的集电极端子相互连接,其连接点与绕组7连接并流过电流iw。开关元件14、16、18的集电极端子相互连接,与高电位DC配线33连接。另外,开关元件15、17、19的发射极端子相互连接,与低电位DC配线34连接。
由此,控制器4基于所生成的栅极信号32,在适当的时刻进行开关元件14、15、16、17、18、19的导通和截止,控制流过绕组5、6、7的电流iu、iv、iw,实现电动机2的旋转控制。栅极信号32形成PWM(脉冲宽度调制)信号的形式,使得电流iu、iv、iw成为相位相互相差120度的正弦波状的信号。
电压传感器36与高电位DC配线33和低电位DC配线34连接,检测它们的电位差。高电位DC配线33和低电位DC配线34的电位差通常为例如100V以上的高电压,因此电压传感器36生成转换为控制器4能够检测的低电压的DC电压传感器信号37(Vdc),并输入到控制器4。
逆变器1中包含的平滑电容器38连接在高电位DC配线33和低电位DC配线34之间。平滑电容器38具有抑制由开关元件14~19的开关动作产生的DC电压的脉动的作用。
在电池3中,电池3的高电位侧的端子与高电位DC配线33连接,电池3的低电位侧的端子与低电位DC配线34连接。由此,作为向逆变器1、电动机2提供电力的直流电源而工作。
从例如ECU(电子控制单元)等车辆的上位控制器提供的转矩指令39(T*)被输入到控制器4。控制器4基于该转矩指令39(T*),进行电动机2的转矩控制。
图2是说明本发明的实施例1的控制器4的处理的处理框图。
在图2中,控制器4的处理区块包含电流指令运算部40、三相二相变换部41、电流控制部42、二相三相变换部43、速度运算部44、PWM栅极控制信号生成部(控制信号生成部)45、差拍抑制控制部46、偏差计算器47以及偏差计算器48。由电流指令运算部40、三相二相变换部41、电流控制部42、二相三相变换部43、偏差计算器47以及偏差计算器48形成三相电压指令值生成部。
控制器4使三相的电流iu、iv、iw流过电动机2来进行旋转控制,但在控制器4的内部使用的是所谓的电流矢量控制方式的方法,该电流矢量控制方式的方法通过从三相的固定坐标变换为由d轴和q轴表示的两相的旋转坐标的坐标系来进行处理。
电流指令运算部40计算d轴电流指令值id*和q轴电流指令值iq*。向电流指令运算部40输入转矩指令39(T*)、旋转角速度ω和DC电压传感器信号37(Vdc),根据这些输入运算d轴电流指令值id*以及q轴电流指令值iq*。旋转角速度ω由速度运算部44基于磁极位置信号9(θ)来运算。
在IPMSM等具有磁凸极性的同步电动机中,转矩T如下式(1)所示,依存于电流。
T=Pp·{φ+(Ld-Lq)id}·iq…(1)
但是,在式(1)中,id是d轴电流,iq是q轴电流,Pp是极对数、Ld是d轴电感,Lq是q轴电感,Φ是磁铁磁通。
磁极位置信号9(θ)被输入到三相二相变换部41和二相三相变换部43,用于d轴q轴的二相坐标和三相坐标之间的变换。
三相二相变换部41对于电流传感器信号11(iu)、12(iv)、13(iw),基于磁极位置信号9(θ)的信息进行向d轴以及q轴的坐标变换,输出d轴检测电流id和q轴检测电流iq。
偏差计算器47运算从电流指令运算部40输出的d轴电流指令值id*与从三相二相变换部41输出的d轴检测电流id的偏差,将d轴电流偏差Δid输出到电流控制部42。
偏差计算器48运算从电流指令运算部40输出的q轴电流指令值iq*与从三相二相变换部41输出的q轴检测电流iq的偏差,将q轴电流偏差Δiq输出到电流控制部42。
电流控制部42以使表示作为目标值的指令值和作为输出值的测定值的偏差的d轴差分电流Δid和q轴电流偏差Δiq成为零的方式来进行反馈控制,为了更新输出值,运算并输出作为电压指令的d轴电压指令Vd*和q轴电压指令Vq*。电流控制部42中的反馈控制例如通过PI控制来进行。
从电流控制部42输出的d轴电压指令值Vd*和q轴电压指令值Vq*被输入到二相三相变换部43,基于磁极位置信号9(θ)运算并输出三相电压指令值Vu*、Vv*、Vw*。
差拍抑制控制部46和差拍补偿量减法部49是与本发明相关的处理,在通常的电流矢量控制中不使用。
因此,在通常的电流矢量控制中,作为二相三相变换部43的输出的三相电压指令值Vu*、Vv*、Vw*不被进行任何处理地被输入至PWM栅极控制信号生成部45。
然后,在通常的电流矢量控制中,PWM栅极控制信号生成部(控制信号生成部)45通过比较三相电压指令值Vu*、Vv*、Vw*与未图示的载波,生成作为PWM信号的6条栅极信号32并输出到栅极驱动电路35。
在本实施例1中,采用逆变器1的开关频率不根据电动机2的速度(频率)连续变化的所谓非同步PWM。因此,载波的频率(载波频率)也不会根据速度而连续变化。
以上是控制器4的通常的控制处理。
接着,对作为本发明的课题的电流差拍现象的产生原理进行整理。
作为产生电流差拍的主要原因,可以举出下述因素。
(1)由逆变器的输入直流电压的脉动引起。
(2)由用于电流矢量控制的电流检测值的误差、磁极位置信号及推定值的误差、电动机的电气及机械构造引起。
(3)由逆变器的正侧输出和负侧输出的电压差引起。
关于(1),主要是在与交流的电力系统连接的系统中容易产生的、通过整流器将系统电力整流为直流时的电力脉动引起逆变器的交流电流的差拍的现象。电流差拍的频率根据直流电压的脉动频率和逆变器的基波频率的关系唯一地求出。专利文献2、专利文献3、专利文献4所记载的技术都以该现象为对象。
关于(2),在专利文献1有记载在逆变器的调制率大、特别是在过调制区域、矩形波驱动区域中不能进行高速的电流矢量控制的情况下发生。
与(1)所记载的现象不同,不能解析地求出电流差拍的频率。
专利文献1以该现象为对象。
本发明以(3)的电流差拍现象为对象。(3)是当载波频率对于基波频率不足够时产生。特别是在非同步PWM且针对每个载波周期进行电压指令值的更新时刻的系统中显著地发生。与(2)的现象相同,不能解析地求出电流差拍的频率。
接着,说明本发明的实施例1的差拍抑制处理和控制系统的构成。
如上所述,在控制器4中增加差拍抑制控制部46和差拍补偿量减法部49。
从电流传感器10向差拍抑制控制部46提供相电流iu、iv、iw,从电流指令运算部40向差拍抑制控制部46提供d轴电流指令值id*和q轴电流指令值iq*。
另外,从磁极位置传感器8向差拍电流抑制控制部46提供磁极位置信号9(θ),从速度运算部44向差拍电流抑制控制部46提供角速度ω。然后,差拍抑制控制单元46检测三相电流iu、iv、iw的差拍分量,并将差拍补偿电压ΔVu**、ΔVv**、ΔVw**输出到差拍补偿量减法部49。
差拍补偿量减法部49从由二相三相变换部43输出的三相电压指令值Vu*、Vv*、Vw*中减去由差拍抑制控制部46输出的差拍补偿电压ΔVu**、ΔVv**、ΔVw**,计算输入到PWM栅极控制信号生成部45的新的三相电压指令值(补偿三相电压指令值)Vu**、Vv**、Vw**。将所计算出的补偿三相电压指令值Vu**、Vv**、Vw**输出到PWM栅极控制信号生成部45。然后,由PWM栅极控制信号生成部45生成栅极信号32,并输出到栅极驱动电路35。
图3是表示在本实施例1的图1所示的电力转换装置中,因上述(3)的现象,即逆变器的正侧输出和负侧输出的电压差而产生了电流差拍时的三相电流波形(实验波形),并表示基波频率500Hz时的例子的图。
图3的(A)所示的波形表示电流差拍抑制前的波形,图3的(B)表示通过本发明的实施例1抑制了电流差拍后的波形。而且,在图3的(A)及(B)中,从上开始表示U相、V相、W相电流。
如图3的(A)所示,相对于电流的基波频率为500Hz,可以确认产生了约40Hz的电流差拍。
另一方面,如图3的(B)所示,从基本频率500Hz的电流iu、iv、iw可以确认电流差拍被抑制。
本发明的实施例1以由上述(3)的主要原因产生的电流差拍现象为对象,但即使是由上述(1)以及(2)的主要原因产生的情况,也能够抑制电流差拍。
图4是表示本发明的实施例1的差拍抑制控制部46的处理内容的内部框图。
在图4中,差拍抑制控制部46包含二相三相变换部50、磁极位置修正部51、减法器52、电动机逆模型部53、低通滤波器54、以及反馈环路55。由二相三相变换部50、磁极位置修正部51以及减法器52来形成差拍提取部。由该差拍提取部来运算逆变器1的输出电流的电流差拍分量。
当在相电流iu、iv、iw中发生了电流差拍现象时,差拍抑制控制部46推定使该电流差拍产生的干扰电压,输出差拍补偿电压(干扰推定电压)ΔVu**、ΔVv**、ΔVw**。
二相三相变换部50基于来自电流指令运算部40的d轴电流指令值id*和q轴电流指令值iq*和从磁极位置修正部51输出的修正后磁极位置θ’,来运算三相的电流指令值iu-、iv*、iw*。
磁极位置修正部51根据从速度运算部44输出的角速度ω,使用角度修正增益Kω来运算磁极位置修正角度Δθ,与从磁极位置传感器8输出的磁极位置信号9(θ)相加,运算修正后磁极位置θ’并输出。角度修正增益Kω是时间的维度,修正由电流传感器10的检测延迟等引起的相电流iu、iv、iw与相电流指令值iu*、iv*、iw*的相位差。
减法器52从相电流iu、iv、iw中减去相电流指令值iu*、iv*、iw*,提取电流差拍分量Δiu、Δiv、Δiw。
电动机逆模型部53从减法器52输入电流差拍分量Δiu、Δiv、Δiw,输出使电流差拍产生的干扰推定电压ΔVu*、ΔVv*、ΔVw*。电动机逆模型部53的功能由下式(2)的传递函数G
G
但是,在上述式(2)中,s是拉普拉斯算子,Td是伪微分器时间常数,K
另外,由于在纯粹的逆模型中包含微分运算,所以上述式(2)的右边第一项目成为伪微分器(高通滤波器)的构成。
低通滤波器54去除重叠在从电动机逆模型部53输出的干扰推定电压ΔVu*、ΔVv*、ΔVw*上的噪声,输出差拍补偿电压ΔVu**、ΔVv**、ΔVw**。由于有时因电动机逆模型部53放大噪声分量,所以通过低通滤波器54来去除噪声分量。
低通滤波器54的功能由下式(3)的传递函数表示。
G
但是,在上述式(3)中,TL是低通滤波器时间常数。通常,时间常数设定为TL>>Td。
反馈环路55将差拍补偿电压ΔVu**、ΔVv**、ΔVw**反馈到低通滤波器54的输入。通过该反馈环路,差拍电流被差拍抑制控制完全抑制,即使ΔVu*、ΔVv*、ΔVw*为0,差拍补偿电压ΔVu**、ΔVv**、ΔVw**也保持输出,因此能够继续进行补偿。
如上所述,在本发明的实施例1中,差拍提取部从由电流传感器10检测出的三相电流信号iu、iv、iw中提取出电流差拍分量Δiu、Δiv、Δiw,通过电动机逆模型部53将提取出的电流差拍分量Δiu、Δiv、Δiw转换为干扰推定电压ΔVu*、ΔVv*、ΔVw*,由低通滤波器54去除噪声,推定差拍补偿电压ΔVu**、ΔVv**、ΔVw**。然后,由差拍补偿量减法部49从三相电压指令值Vu*、Vv*、Vw*中减去推定出的差拍补偿电压ΔVu**、ΔVv**、ΔVw**来进行补偿,并提供给驱动逆变器1的PWM栅极控制信号生成部45。从PWM栅极控制信号生成部45向栅极驱动电路35提供栅极信号32,向驱动电动机2的逆变器1输出栅极驱动信号26~31。
因此,根据实施例1,能够实现不需要适配作业、无论电动机处于何种运转状态都能够抑制电流差拍的电力转换装置。
(实施例2)
接着,对本发明的实施例2进行说明。
图5是表示本发明的实施例2的差拍抑制控制部46的处理内容的内部框图。
在图5所示的例子中,在实施例1的图4所示的差拍抑制控制部46的内部区块中追加了输出调整处理部56和输出调整乘法器57。实施例2中的其他构成与实施例1相同,因此省略图示及其详细说明。
在电动机2的速度低、假定的电流差拍分量的频率与相电流的基波频率接近的情况下,差拍抑制控制部46有可能无法正确地运算差拍补偿电压。
另外,电动机2的速度非常高,三相电流iu、iv、iw的检测延迟、运算延迟的影响变大,减法器52不能提取正确的差拍电流。在这种情况下,有可能影响电流控制部42的动作,不能正确控制电动机2的输出转矩。
通过输出调整处理部56,在上述的差拍抑制控制部46的动作中有可能产生问题的速度区域停止差拍补偿,由此能够排除该误动作造成的影响。即,根据速度运算部44所运算出的角速度ω来使差拍分量的抑制动作停止。
在图5中,输出调整处理部56输入实施了绝对值处理的电动机2的角速度ω,并根据电动机2的角速度,调整从低通滤波器54输出的差拍补偿电压ΔVu**、ΔVv**、ΔVw**。
图6是说明实施例2中的输出调整处理部56的处理的图表。
在图6中,纵轴表示输出调整处理部56的输出值,横轴表示输入到输出调整处理部56的来自速度运算部44的角速度ω。
在电动机2以角速度ω
在电动机2为角速度ω
在超过角速度ω
另外,在从角速度ω
这样,在从角速度ω
如上所述,根据本发明的实施例2,与实施例1同样,能够实现不需要适配作业、无论电动机处于何种运转状态都能够抑制电流差拍的电力转换装置。
进而,根据实施例2,构成为在电动机2的速度为最低速度以下的速度区域和最大速度以上的速度区域中,停止差拍补偿,所以即使在电动机2的速度低、假定的电流差拍分量的频率与相电流的基波频率接近的情况下、或电动机2的速度非常高、三相电流iu、iv、iw的检测延迟、运算延迟的影响变大的情况下,也能够正确地控制电动机2的输出转矩。
另外,构成为在从角速度ω
接着,对本发明的实施例3进行说明。
实施例3是具备电力转换装置的电动车辆系统的例子。
图7是本发明的实施例3的电动车辆系统的概略构成图。
另外,在此对搭载了实施例1或实施例2的任意一个的电力转换装置的电动车辆系统的一例进行说明。
如图7所示,电动车辆系统58在车体上轴支承有一对车轴59、60。在一方的车轴59的两端固定有车轮61和车轮62,在另一方的车轴60的两端固定有车轮63和车轮64。在一方的车轴59上连结有电动机2,电动机2的旋转动力经由车轴59传递到车轮61和车轮62。
电动机驱动装置(电动机控制装置)65接受由ECU等上位系统生成的指令转矩T*,来驱动电动机2。电动机驱动装置65具备实施例1或2的电力转换装置。
在将本发明应用于电动车辆系统58的情况下,能够避免过电流保护由于电流差拍而工作从而导致逆变器停止的问题。
因此,能够提高电动车辆系统58的动作质量,能够提高可靠性。
另外,根据本发明,能够抑制由电流脉动现象引起的电动机效率的恶化。由此,在电动车辆系统58中能够期待提高电力使用效率。
在上述的实施例中,在图2中,差拍抑制控制部46和差拍补偿量减法部49分开设置,但也可以构成为差拍抑制控制部46具备差拍补偿量减法部49,将来自二相三相变换部43的三相电压指令值输出到差拍补偿量减法部49。将差拍抑制控制部46具备差拍补偿量减法部49的构成定义为差拍补偿部。
另外,在上述的实施例中,在图4中,电动机逆模型部53和低通滤波器54分开设置,但也可以将电动机逆模型部53和低通滤波器54作为一体,以一个功能区块进行构成。将电动机逆模型部53和低通滤波器54作为一个功能区块定义为差拍补偿电压运算部。由该差拍补偿电压运算部来推定使逆变器1的电流差拍分量产生的电压。
另外,也可以将输出调整处理部56和输出调整乘法器57作为一个功能区块。可以将输出调整处理部56和输出调整乘法器57作为一个功能区块定义为输出调整部。
另外,本发明不限于上述实施例,还包括各种变形例。
例如,上述实施例是为了容易理解地说明本发明而详细说明的例子,并不一定限定于具备所说明的全部构成。
另外,可以将一个实施例的构成的一部分置换为另一个实施例的构成,也可以在某一个实施例的构成中添加另一个实施例的构成。
另外,对于各实施例的构成的一部分,可以进行其他构成的追加、删除、置换。下面给出一个例子。
用于逆变器1的开关元件不限于Si-IGBT。开关元件可以从Si-IGBT替换为SiC-MOSFET。
另外,电动机2不限于IPMSM。例如,也可以置换为表面磁铁型同步电动机、感应电动机。
而且,逆变器1的直流电压源不限于电池。在与交流电力系统连接的系统中,可以通过整流器将系统的交流电力整流为直流,得到直流电压源。
符号说明
1…逆变器,2…电动机,3…电池,4…控制器,5、6、7…三相绕组,8…磁极位置传感器,9(θ)…磁极位置信号,10…电流传感器,11、12、13…相电流传感器信号,14~19…开关元件,20~25…续流二极管,26~31…栅极驱动信号,32…栅极信号,33…高电位DC配线,34…低电位DC配线,35…栅极驱动电路,36…电压传感器,37…DC电压传感器信号,38…平滑电容器,39…转矩指令,40…电流指令运算部,41…三相二相变换部,42…电流控制部,43、50…二相三相变换部,44…速度运算部,45…PWM栅极控制信号生成部(控制信号生成部),46…差拍抑制控制部,47、48…偏差计算器,49…差拍补偿量减法部,51…磁极位置修正部,52…减法器,53…电动机逆模型部,54…低通滤波器,55…反馈环路,56…输出调整处理部,57…输出调整乘法器,58…电动车辆系统,59、60…车轴,61~64…车轮,65…电动机驱动装置(电动机控制装置)。
- 电力转换装置以及具备该装置的电动车辆系统
- 电力转换装置、具备其的电动机驱动装置、具备其的鼓风机、压缩机、以及具备这些的空调机、冰箱和制冷机